29/10/2013
Zoolverhoging = Beperking
naar dorsaal flexie
Hakverhoging = leniger
naar dorsaal flexie
Vergelijken van hoeken
Welke hoek is het
grootst?
Schatten van hoeken
Hoe groot is deze
hoek?
Drie dimensionale Arthrokinematische Mobilisatie
Cursus Klinische Video/Foto-Analyse
Avond 2: Coördinaten en Hoeken
Chris Riezebos
Aad Lagerberg
www.damcursus.nl
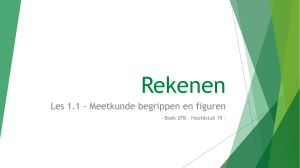
5 markers:
op gewrichtsassen
Meten van hoeken in
foto / video
8 markers:
op
4 elementen
Praktijkvoorbeeld
Romp
Romp
Heupgewr.
Bovenbeen
Kniegewr.
Onderbeen
Enkelgewr.
MTV
3-punts
hoek
4-punts
hoek
Voet
1
29/10/2013
Staat deze
knie in flexie?
Hoeken
tussen
markers.
Hoeken zoals
we gewend
zijn.
zijn .
Staat deze voet
in
plantairflexie?
plantairflexie
?
85o
0o
Hoekdefinities
0o
Niet mogelijk
in Kinovea
Ongebruikelijk
Ter herinnering:
Pythagoras
Trigonometrie
b
sin α =
c
cos α =
c
b
tan α =
c2 = a2 + b 2
a
c
b
a
α
Neutrale 0-methode
a
2
29/10/2013
Cosinusregel:
c2 = a2 + b2 – 2 a b cos α
c2 = a2 + b2 – 2 a b cos α
Cosinusregel:
α = acos
c
a2
α
b2
+
–
2ab
c2
X1, Y1
X1, Y1
a
Als de drie zijden van een
driehoek bekend zijn
zijn,, dan zijn
de hoeken ook bekend!
bekend!
b
a
c
α
X2, Y2
a
y
a = √ x2 + y2
x = X1 –X2
x
b
c
β = acos
Pythagoras:
a2 =x2 + y2
a2 = b2 + c2 – 2 b c cos β
β b
a2 + b2 – c2
2ab
α = acos
a
b 2 + c2 – a2
2bc
y = Y1 –Y2
X2, Y2
a2 = (X1 – X2)2 + (Y1-Y2)2
X3, Y3
a=
√(X1 – X2)
2
+ (Y1-Y2)2
Bedenk zelf de 3e mogelijkheid.
a2 = (X1 – X2)2 + (Y1-Y2)2
Cosinusregel:
Hoe groot is de
kniehoek?
kniehoek
?
a=
√(X1 – X2)
2
Oplossing via de tangens
Hoe groot is de kniehoek?
kniehoek?
+ (Y1-Y2)2
X1, Y1
X1, Y1
α=β+γ
b2 = (X2 – X3)2 + (Y2-Y3)2
a
c
α
b=
√(X2 – X3)
c2
X3)2
2
X2, Y2
c=
= (X1 –
√(X1 – X3)
2
X3, Y3
α = acos
x1 , y1
x3 , y3
α
x4 , y4
( xy –– xy ) axay
2
1
2
1
( xy –– xy ) bxby
4
3
4
3
+
b
+ (Y1-Y3)2
a2 + b2 – c2
2ab
by
α ax
Hoe groot is hoek α ?
bx
φ = atan
Y1-Y2
X1-X2
β = atan
Y2-Y3
X2-X3
X2, Y2
Inproduct:
. bx
( ax
ay ) (by) = (ax . bx) + (ay . by)
Leg de vectoren in de
oorsprong = bepaal de
verschilvector.
Vectoren en het
Inproduct =
Inwendig product =
Dot product =
Scalair product
φ
X3, Y3
a
Het inproduct is gelijk aan:
a . b . cos α
b
a . b . cos α = (ax . bx) + (ay . by)
Lengte a:
ay
γ
β
(Y1-Y3)2
(γ = gamma)
γ = 180 - φ
+ (Y2-Y3)2
α
b
x2 , y2
a
a = s ax2 + ay2
ay
α ax
Lengte
b:
by
b = sbxbx2 + by2
α = acos
(ax . bx) + (ay . by)
a.b
Vectoren
en het
Inproduct
3
29/10/2013
x4 – x3
y4 – y3
ax
ay
x3 – x2
y3 – y2
bx
by
Hoekstand:
3-punts
Hoe groot is de kniehoek ?
KNIE
Lengte a:
a = s ax2 + ay2
meetfout
Blauw : w erkelijke draaipunten
Rood: (onjuiste
( onjuiste)) positie van de m arkers
Lengte b:
b = s bx2 + by2
α = acos =
(ax . bx) + (ay . by)
a.b
In Excel:
=180-(DEGREES( ACOS( ( (G10-E10)*(E10-C10)+(H10-F10)*(F10-D10) ) /
(SQRT( (G10-E10)^2+(H10-F10)^2) *SQRT((E10-C10)^2+(F10-D10)^2)))))
Vectoren en
het Inproduct
Het 4-punts-marker systeem lost de meetfout van de absolute hoek
niet op. Andere markerposities geven andere hoekstanden.
Hoek
Hoekstand
stand::
4-punts
meetfout
ENKEL
Hoekstand
verandering:
3-punts
Hoek
Hoekstand
stand::
4-punts
Blauw : w erkelijke
draaipunten
Rood:
Rood: (onjuiste
( onjuiste))
positie van de
m arkers
Blauw : w erkelijk draaipunt
Rood
Rood:: (onjuiste
( onjuiste)) positie van de m arker
Blauw : w erkelijk draaipunt
Rood:
Rood: (onjuiste
( onjuiste)) positie van de m arker
Principe analyse
hoekstandverandering:
3-punts
Principe analyse
hoekstandverandering:
3-punts
4
29/10/2013
Blauw : w erkelijk draaipunt
Rood
Rood:: (onjuiste
( onjuiste)) positie van de m arker
Bij het toepassen van markers op de gewrichten,
gewrichten, moeten deze zo nauwkeurig
mogelijk op de rotatie
rotatie--as worden geplaatst.
geplaatst.
Principe analyse
hoekstandverandering:
3-punts
Hoekstandverandering:
3-punts
meetfout
Hoekstand
verandering:
4-punts
Tw ee 4
4-- marker
configuraties
Bij vier markers zijn de
hoekstandveranderingen
altijd identiek, ongeacht de
plaatsing.
Top trochanter major
Hoekstandverandering:
4-punts
Voor de hoekstand
hoekstand-veranderingen,, doet
veranderingen
de markerpositie er
bij 4-puntsmetingen
niet toe.
Alle punten op de
elementen
doorlopen dezelfde
hoek
hoek..
Principe analyse
hoekstandverandering:
4-punts
Epicondylus lateralis
Positie
gewrichtsassen
Onderkant malleolus lat.
5
29/10/2013
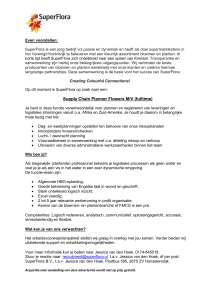
Digitaliseringsnauwkeurigheid en hoekmeting.
hoekmeting.
Knie
Enkel
Relatief kleine digitaliserings
digitaliserings--fouten leiden
tot relatief grote fouten in hoekgrootte en
daarmee tot onnauwkeurigheden in de
hoekstandsveranderingen
Bij rotatie uit het vlak van
beweging,, zowel vertekening
beweging
van lengten als van hoeken
hoeken..
90o
70o
110o
Rotatie uit het vlak van beweging (Plane of
Motion PoM)
6