Relativiteitstheorie van Einstein: Tensoren
Relativiteitstheorie van Einstein: Tensoren ........................................................................... 1
0. Intro ...................................................................................................................................... 2
0.1 Sommatie conventie van Einstein ................................................................................ 2
0.2 Didaktisch voorbeeld .................................................................................................... 4
1. Vectoren in een affiene ruimte ........................................................................................... 5
1.1 Covariante basis ............................................................................................................ 5
1.2 Scalair produkt .............................................................................................................. 6
Voorbeeld [definitie van een basis in een schuin assenstelsel]................................... 6
1.3 Contravariante basis...................................................................................................... 7
Voorbeeld [contravariante basis in een schuin assenstelsel]....................................... 8
1.4 Covariante en contravariante componenten van een vector....................................... 9
Voorbeeld [schuin assenstelsel]: componenten+afstand ........................................... 10
1.5 Duale ruimte: co-vector of éénterm ........................................................................... 11
1.6 Samenvatting vectoren................................................................................................ 13
2. Definitie van een tensor .................................................................................................... 14
2.1 Wat is een tensor? ....................................................................................................... 14
2.2 Definitie van een (2,0) tensor.................................................................................... 14
2.3 Definitie van een (m,n) tensor................................................................................... 15
3 Kromlijnige (curvilineaire) coordinaten ........................................................................... 16
3.1 Intro.............................................................................................................................. 16
3.2 Vector functies en afgeleide van een vector.............................................................. 17
3.3 Meerdere parameters en coordinaten......................................................................... 18
3.4 Voorbeeld: covariante basis voor 2D poolcoordinaten ............................................ 20
3.5 Voorbeeld: contravariante basis voor 2D poolcoordinaten...................................... 21
3.6 Coordinaatruimte en metrische ruimte ...................................................................... 21
4. Tensor : tweede definitie................................................................................................... 23
4.1 Tensoren van eerste orde ............................................................................................ 23
4.2 Tensoren van tweede orde .......................................................................................... 24
4.3 Invarianten................................................................................................................... 24
4.4 Berekening basis ......................................................................................................... 25
4.5 Basisstelling van de tensorrekening........................................................................... 27
4.6 Tensor algebra ............................................................................................................. 29
5 Conclusies........................................................................................................................... 29
Appendix A: voorbeelden van curvilineaire coordinaten ................................................... 31
Appendix B: lineaire functie................................................................................................. 32
Appendix C: vectoren in de Minkowski ruimte .................................................................. 33
1
0. Intro
Tensors zijn geometrische objecten die lineaire relaties beschrijven waarbij vectors en
scalars ook als tensor worden gezien. Dit lijkt abstract maar het betekent dat we met
indices werken waarover gesommeerd wordt. Een voorbeeld is de stress tensor T met als
input een richting v zodat T(v) de spanning voorstelt (kracht per opp) loodrecht op v.
Omdat tensors werken met vectoren (en niet met componenten) zijn de resultaten
‘onafhankelijk van de coordinaten’. Dit betekent niet dat de beschrijving in elk
coordinatenstelsel identiek is maar wel dat er een transformatie regel bestaat die het
verband aangeeft tussen beschrijvingen in verschillende coordinatenstelsels (covariantie)
Er zijn twee manieren om tensoren te introduceren. Alhoewel één van beide manieren in
principe voldoende is zullen beiden toch aan bod komen omdat dit het inzicht verhoogt.
Een eerste mogelijkheid is tensoren te zien als een uitbreiding en een veralgemening van
vectoren. We beginnen met vector algebra in een Euclidische ruimte waarbij we zowel
voor de basisvectoren en als voor de componenten twee types onderscheiden: covariante
en contravariante. Het is een constructieve aanpak waarbij de context gegeven is door
affiene assenstelsels (rechthoekig en schuin).
Een tweede manier stelt de eigenschappen van coordinaat transformaties centraal waarbij
de context gegeven is door kromlijnige stelsels. Een tensor kan zich onder invloed van
een transformatie gedragen als een covariante of een contravariante grootheid. Dit wordt
als definitie van een tensor gezien. Hieruit volgt dat de geldigheid van een tensor
vergelijking een voldoende voorwaarde is om geldig te zijn in alle stelsels.
0.1 Sommatie conventie van Einstein
Een tensor wordt geschreven als een expressie van variabelen met indices waarbij de
sommatie niet meer expliciet via een somteken wordt weergegeven maar via de repetitie
van indices.
n
∑a x
i i
= a1 x1 + a 2 x2 + K + an xn ⇔ ai xi
Equation 1
i =1
Er zijn twee soorten indices. In de expressie aij x j is i een vrije index en j een dummy
index. Een index kan op twee manieren voorkomen: bovenaan voor contravariante of
onderaan voor covariante tensoren.
Een vrije index is een index die slechts eenmaal voorkomt in elke tensor term. Elke term
moet dezelfde set hebben van vrije indices die bovendien op dezelfde manier
(boven/onder) voorkomen.
Een dummy index komt tweemaal voor in elke tensor term. Er zijn geen indices die meer
dan twee keer voorkomen. De keuze van het symbool voor dummy index is irrelevant. Zo
kan in de bovenstaande expressie j vervangen worden door k en de waarde blijft dezelfde.
Elke dummy index staat voor een sommatie waarbij het expliciete somteken wordt
weggelaten en waarbij de sommatie loopt van 1,2,3...n. Als er twee dummy indices zijn
2
betekent dit een dubbele sommatie over dezelfde range n. Dit betekent dus n2 termen. Als
er drie dummy indices zijn wordt dit een driedubbele sommatie met n3 termen.
Hier zijn een aantal voorbeelden
• x i yi = x1 y1 + x 2 y2
n
•
x ij yi y j = ∑
i =1
n
∑x
ij
yi y j
j =1
• ai ( xi + yi ) moet gelezen worden als ai bi met bi = xi + yi .
Ter illustratie volgen nog enkele expressies die ongeldig zijn zodat de gelijkheid niet
klopt.
• aij ( xi + y j ) ≠ aij xi + aij y j omdat xi + y j ongeldig is wegens verschillende dummy
indices in beide termen. Als i vervangen wordt door j is het probleem opgelost
aij ( x j + y j ) = aij x j + aij y j
•
Er geldt aij xi y j ≠ aij yi x j . Beide leden kunnen wel gelijk aan elkaar worden
•
gemaakt als aij xi y j = aij y j xi
of
aij xi x j = a ji xi x j . Je mag dus wel i en j
verwisselen evenals xi en yj.
Uit het voorgaande volgt vrij direct dat (aij + a ji ) xi y j ≠ 2aij xi y j maar ook dat
(aij + a ji ) xi x j = 2aij xi x j
en
( aij − a ji ) xi x j = 0
Verder betekent het symbool δ ij ∀j ≠ i : δ ij = 0
δ ij
en
en
∀j = i : δ ij = 1 . Idem voor
δ ij . Hieruit volgt
δ jk δ i j = δ1k δ i1 + δ 2k δ i2 = δ11δ11 + δ 22δ 22 + δ 33δ 33 = 3
δ jk δ i j = δ ik = δ ii = δ 11 + δ 22 + δ 33 = 3
δ iiδ kk = 9
Dit symbool wordt ook gebruikt om de inverse te definieren: Als
a ik bkj = δ ij & b ik a kj = δ ij dan noemen we a en b de inverse van elkaar. Idem voor
a ij bkj = δ ki & bkj aik = δ i j of ook a i b j = δ ij & b j a i = δ ij . Dit is de tensor vertaling
van de matrix inversie die gedefinieerd is als volgt. Als A, B en E vierknate matrices zijn
en E de eenheidsmatrix en als AB=E en BA=E dan zijn ze elkaars inverse of B=A-1. Dit
kan gebruikt worden om een lineair stelsel op te lossen. In tensor rekenen gaat dat als
volgt
a ij x j = y i → bik a ij x j = bik y i → δ kj x j = bik y i → x k = bik y i
b ki aij = δ kj → b ki aij x j = b ki yi → δ jk x j = b ki yi → x k = d ki yi − a21 − a21
Een vector en een tensor worden aangegeven via een pijltje boven de naam van de
r
veranderlijke. De basis vectoren worden voorgesteld door e i in het geval van een
r
orthogonaal assenstelsel (elk paar basisvectoren staan loodrecht op elkaar) en door g i in
alle andere (meer algemene) gevallen. Als we expliciet willen aangeven dat het om
)
basisvectorne van lengte 1 gaat gebruiken we het symbool e i .
3
Verder geldt dat een matrix A geschreven wordt als Aµν en dat de getransponeerde gelijk
is aan Aνµ .
0.2 Didaktisch voorbeeld
Een voorbeeld is de spanningstensor. Veronderstel een voorwerp waarin schuifkrachten
mogelijk zijn, met andere woorden waarin de resulterende kracht in het algemeen niet
loodrecht staat op het oppervlak van een snede.
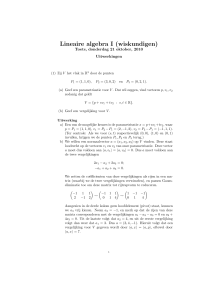
Als we een kubus beschouwen, hebben we dus telkens drie componenten nodig voor elk
zijvlak zoals getoond in de figuur. Als we de eenheidskubus veronderstellen dan is de
oppervlakte van de zijvlakken gelijk aan één en dus is de spanning gelijk aan de kracht.
De spanning in het materiaal is gekarakteriseerd door
r
r
r
r
r
F1 = σ 11 e1 + σ 12 e2 + σ 13 e3 = σ 1s e s
r
r
r
r
r
F2 = σ 21 e1 + σ 22 e 2 + σ 23 e3 = σ 2 s e s
r
r
r
r
r
F3 = σ 31 e1 + σ 32 e2 + σ 33 e3 = σ 3 s e s
waarin σij schuifkrachten of normaalkrachten zijn alnaargelang i en j verschillend of
gelijk zijn. Fi stelt een kracht voor.
e3
e3
e3
F3
σ
σ
33
σ 32
31
σ13
F2
σ 11
e2
e1
F1
σ12
B1
σ
23
σ22
F
B2
σ21
e2
e1
n
B3
e2
e1
Figure 1 De spanningstensor als voorbeeld. (links) de krachten op de zijvlakken zodat er evenwicht is
(midden) dezelfde krachten maar nu in de vorm van componenten (rechts) berekening van de
krachten op een willekeurige doorsnede met behulp van tensors.
Vervolgens willen we de kracht berekenen op een willekeurige doorsnede, bijvoorbeeld
op het diagonaalvlak (vlak door de drie snijpunten met de coordinaatassen) van de kubus
dat gekarakteriseerd is door de vector n loodrecht op de doorsnede.
Daartoe beschouwen we het viervlak gevormd door de drie coordinaatvlakken en een
vierde vlak zijnde het diagonaalvlak. Welke kracht moet er inwerken op dit
diagonaalvlak opdat er evenwicht zou zijn? De drie tetraeder vlakken die samenvallen
met de coordinaatvlakken hebben als oppervlakte respectievelijk B1, B2 en B3. Het
krachtenevenwicht op de tetraeder wordt geschreven als
r
r
r
r
B1 F1 + B2 F2 + B3 F3 − A * F = 0
4
waarin A de oppervlakte is van het diagonaalvlak en F de kracht hierop. Maar B1 is gelijk
aan de projectie van A op het (e 2, e 3) vlak. De hoek tussen beide vlakken wordt gegeven
door de hoek tussen de normaal n en de eenheidsvector e 1 . Idem voor B2 en B3
r r
B1 = A(n • e1 ) = An1
r r
B2 = A(n • e2 ) = An2
r r
B3 = A( n • e3 ) = An3
Invullen in de evenwichtsvergelijking geeft
r
r r
r
r r
r
r r
r
r r
r
A * F = A(n • e1 )σ 1s e s + A( n • e2 )σ 2 s es + A(n • e3 )σ 3 s es = ( n • ei )σ is e s
r
r r
r
r
r
F = n1σ 1s es + n 2σ 2 s es + n3σ 3 s es = T ⊗ n
σ
σ n1
F1 σ
F = σ 21 σ 22 σ 23 n
2
2
F3 σ 31 σ 32 σ 33 n3
Conclusie: Er is behoefte aan een nieuw concept, tensor, om de relatie tussen twee
vectoren uit te drukken tensor = (vector, vector) of vector = (tensor, vector) anders
dan het scalair product of het uitwendig product van het type.
11
12
13
1. Vectoren in een affiene ruimte
1.1 Covariante basis
Definitie [vectorruimte]
Een vectorruimte Rn is een verzameling van geordende n-tallen van de vorm (a1, a2, a3, ...
an) die we vectoren noemen en waarbij de optelling en de scalaire vermenigvuldigng
gedefinieerd zijn. ■
Het is belangrijk een duidelijk onderscheid te maken tussen de vector, de basis en de
componenten. De vector representeert vaak een fysische grootheid, die dus invariant is
(onafhankelijk van de coordinaten) en die wordt bepaald door de basis en de
componenten die beiden wel afhangen van de coordinaten.
Een basis in Rn wordt gevormd door n vectoren die lineair onafhankelijk zijn. De basis
spant de ruimte op, d.w.z. dat elke vector geschreven kan worden als een combinatie van
de basisvectoren. We noteren een vector als
r
r
r
r
r
a = a 1 g1 + a 2 g 2 + a 3 g 3 = a i g i . (Equation 2)
De meetkundige interpretatie hiervan is evenwijdige projectie, d.w.z. dat een vector
geprojecteerd wordt op een coordinaat-as door middel van evenwijdigen met de andere
coordinaten. (in 2D een evenwijdige lijn, in 3D een evenwijdige vlak)
In het geval van een orthogonaal assenstelsel (elk paar basisvectoren staan loodrecht op
r
r
elkaar) gebruiken we ei in plaats van g i voor de basisvectoren.
5
1.2 Scalair produkt
Het scalair product van twee vectoren is gelijk aan het product van beide lengtes met de
cosinus van de ingesloten hoek. Het is dus niet afhankelijk van een toevallige keuze van
de coordinaten en wordt geschreven als
r r
r r
r r
r r
a • b = a 1b 1 g1 • g 1 + a 1b 2 g1 • g 2 + a 1b 3 g 1 • g 3
r r
r r
r r
+ a 2 b1 g 2 • g1 + a 2 b 2 g 2 • g 2 + a 2 b 3 g 2 • g 3
Equation 3
r
r
r
r
r
r
+ a 3b 1 g 3 • g 1 + a 3 b 2 g 3 • g 2 + a 3b 3 g 3 • g 3
r r
r r
of met de compakte Einstein notatie a • b = a i b j g i • g j . Om te benadrukken dat het
scalair produkt van elk paar basisvectoren een scalar is schrijven we
r r
g i • g j = g ij .
(Equation 4)
r r
In het algemene geval geldt dus a • b = g ij a i b j . In het specifieke geval van een
r r
r r
rechthoekig assenstelsel geldt dat g ij = ei • e j = δ i j ⇒ a • b = a i b i .
Voorbeeld [definitie van een basis in een schuin assenstelsel]
Om een basis te definieren kunnen we de lengte van elke basisvector definieren plus de
hoek tussen elk paar. Bijv in twee dimensies, twee vectoren van lengte 1 en een hoek alfa
tussen beiden.
Het kan ook ten opzichte van een ander assenstelsel waarbij er met coordinaten wordt
gewerkt. Stel een schuin assenstelsel gedefinieerd ten opzichte van een orthogonaal
r
r
r
r
r
r r
stelsel als g 1 = (1,0) en g 2 = ( 0.5,1) of, met andere woorden, g1 = e1 en g 2 = 0.5e1 + e2 .
1 0.5 1
r
r
r
r
r
Hieruit volgt e1 = g 1 en e2 = −0.5 g 1 + g 2 en eveneens g ij =
.
0.5 1.25
In het orthogonale stelsel zijn er verder twee vectoren gegeven, a (1.5,1) en b (1.5,-1),
waarvan we het scalaire produkt willen berekenen. Met behulp van de bovenstaande
vergelijkingen voor de g basis vectoren kan dit omgerekend worden zodat
r
r r r
r r
OA = a = g1 + g 2
OB = b = 2 g1 − g 2
Het scalaire produkt in het orthogonale stelsel is (1.5*1.5+1*(-1))=1.25 en in het g-stelsel
wordt dit 2 + 0.5 * 1 * 2 + 0.5 * 1 * (−1) + 1.25 * 1 * (−1 )=1.25. ■
1
Het kan ook zon der de omweg van het orthogonale stelsel door te specificeren dat beide basisvectoren
r r
r r
r r
lengte 1 hebben en een hoek van 60° maken zodat g1 • g 1 = 1; g 2 • g 2 = 1; g 1 • g 2 = 0.5; .
6
A
1
e2
g2
O
e1=g1
1
2
B
Figure 2 Voorbeeld van het scalair product in een scheef assenstelsel. (Hoek is groter dan 60°)
1.3 Contravariante basis
r r r
r r r
Gegeven een eerste basis g1 , g 2 , g 3 construeren we een tweede basis g 1 , g 2 , g 3 waarbij we
in de notatie superscripts gebruiken om het onderscheid te maken.
Definitie [contravariante basis]
r
r
De tweede basis g j is gedefinieerd als g j • g i = δ i j
■
r
r
We noemen g j de contravariante basis en g i de covariante basis. Een vector a wordt nu
geschreven als
r
r
(Equation 5)
a = ai g i .
Om te benadrukken dat het scalaire produkt van elk paar basisvectoren een scalar is
schrijven we
r r
(Equation 6)
g i • g j = g ij .
r
r
Uit de definitie volgt dat elke g j loodrecht staat op alle g i behalve één waardoor de
richting volledig bepaald is en dus ook de hoek met die ene uitzondering, d.w.z. de hoek
r
r
r
r
tussen g i en g i . Deze hoek samen met de grootte van de vectoren g i
en
gi
bepalen het scalair product.
r
r
Het verband tussen g i en g i kan ook uitgedrukt worden via de metrische tensor. Stel
r
r
r
dat we A zoeken in g i = Aij g i . Beide leden vermenigvuldigen met g k geeft
7
r r
r r
g i • g k = Aij g i . • g k ⇒ g ik = Aij δ kj ⇒ g ik = Aik
Het gezochte verband is dus
r
r
(Equation 7)
g i = g ij g i .
r
r
Op dezelfde manier vinden we g i = g ij g i . We noemen g ij de covariante metrische
coefficienten en g ij de contravariante metrische coefficienten. Er is een rechtstreeks
verband tussen gij en g ij. Daartoe vermenigvuldigen we beide leden van Equation 7
r
r
met g k = g kl g l als volgt
r r
r r
g i • g k = g ij g kl g j • g l
δ ki = g ij g klδ lj
i
k
Equation 8
ij
δ = g g kj
Hieruit volgt – per definitie – dat gij en gij elkaars inverse zijn.
Voorbeeld [contravariante basis in een schuin assenstelsel]
r
In een gegeven orthogonaal stelsel (e1 , e 2 ) dat we als referentie gebruiken, definieren we
r
r
r
eerst een covariante basis g1 = (1,0) _ en_ g2 = (1,2) (zie Figuur 2). We bepalen nu g 1 .
r
r
r
De richting is loodrecht op g 2 waaruit volgt dat de hoek tussen g 1 en g 1 gelijk is aan
β=(90°-α’) en α ’= α+ ε. De grootte volgt uit het scalair product
r r
r r
r
r
1 = g1 • g 1 = cos β g1 g 1 = cos β g 1 ⇒ g 1 = 1 / cos β .
r
Terug vertalen naar het Cartesisch stelsel geeft voor de x component g 1 cos β = 1 en
r
voor de y component − g 1 sin β = −tgβ of in termen van α wordt dit (1,-1/tg α’)=(1,0.5).
r
r
We bepalen nu g 2 . De richting is loodrecht op g 1 waaruit volgt de x component gelijk is
aan 0. De grootte volgt uit
r
r
r r
r
r
r
1 = g 2 • g 2 = cos β g 2 g 2 = 5 cos β g 2 = 2 g 2 ⇒ g 2 = 1 / 2 . Dit geeft (0,1/2)
8
F
D
1
C
P
g2
e2
β
g2
a
ε
α
O
e1=g1
B
β
g1
2
A
E
Figure 3 toont een orthogonale basis (e1, e2) (blauw), een scheefhoekige covariante basis (g 1, g2)
(groen) en de overeenkomstige contravariante basis (g 1, g2) (rood). In geval van 2 dimensies staat g1
loodrecht op g2 en g2 loodrecht op g 1. Componenten in de ene basis komen overeen met projecties op
de andere basis. Bijvoorbeeld, PF is evenwijdig met g 1 maar ook loodrecht op g2. Hieruit volgt dat de
component x2 gelijk is aan de projectie van vector a op g 2
1.4 Covariante en contravariante componenten van een vector
We bespreken nu het verband tussen de basis en de componenten van een vector. Hoe
r
kunnen componenten gevonden worden? Een vector a kan in beide basissen geschreven
r
r
r
r
worden als a = a i g i = ai g i . Scalair vermenigvuldigen met g j geeft
a i δ i j = a i g ij ⇒ a j = ai g ij
Het onderstaande is gemakkelijk verifieerbaar
9
Equation 9
r r
r
r
a • g i = a k g k • g i = a k δ ik = ai
r r
r r
a • g i = a k g k • g i = a k δ ki = a i
Equation 10
Dit kan meetkundig als volgt worden geinterpreteerd. Nemen we als voorbeeld de vector
OP in Fig 2, die evenwijdig met g1 geprojecteerd wordt op g2 (OF). Omwille vande
speciale constructie van beide basissen staat FP ook loodrecht op g2. We beshcouwen nu
r
r
2 vectoren, namelijk a _ en _ a i g i a die aanleding geven tot eenzelfde scalair product met
gi, vermits de projectie gelijk is aan OD.
r r
r
r
a • g i = proj (a → g i ) * g i
r r
r r
⇒ a • g i = ai g i • g i = a i
ri r
r
r
a i g • g i = proj (a → g i ) * g i
Daaruit volgt hetzelfde resultaat als Eq. 10.
r r
r r
a • g i = a k g k • g i = a k g ki
Equation 11
r r
r
r
a • g i = a k g k • g i = a k g ki
Uit deze laatste vergelijkingen samen met de vorige volgt
r r
ai ⇐ a • g i ⇒ a k g ki
Equation 12
r r
a i ⇐ a • g i ⇒ ak g ki
Ook het scalaire product kan nu met componenten worden geschreven als volgt:
r r
Equation 13
a • b = g ij a i b j = ai b j
Voorbeeld [schuin assenstelsel]: componenten+afstand
We berekenen zowel de covariante als de contravariante componenten van een vector OP
waarvan de Cartesische coordinaten gelijk zijn aan (1.5,1).Daartoe berekenen we het
scalaire product met de respectievelijke basisvector. De vector OP kan geschreven
r
r
r
r
worden als g1 + 0.5 g 2 = 1.5 g 1 + 3.5 g 2 . De lengte van OP= 3.25 .
In bijgaande tabel wordt OP geprojecteerd op de g-assen (OB, OD, OA en OC in lijn 6)
en vermenigvuldigd met de lengte van de basisvectoren (lijn 7) om de componenten te
bekomen. Het resultaat is dat de componenten van de vector OP in de covariante basis
gelijk zijn aan (1,0.5) en in de contravariante aan (1.5, 3.5).
1
2 coordinaten
3 lengte
4 Hoek-tg
5 Hoek-Cos
6 Projectie van OP
7 Scal_prod=proj*lengte
8 Component
r
g1
(1,0)
1
Tg(α)=1/1.5
2.25 3.25
OB=1.5
1.5
a1
r
g2
(1,2)
5
tg(ε)=1/1.75
0.868
r
g1
(1,-0.5)
1.25
tg(90- ε)=1.75
0.496
OD=1.55
3.5
a2
OA=0.89
1
a1
10
r
g2
(0,0.5)
0.5
tg(90-α)=1/tg(α)
1 3.25
OC=1
0.5
a2
Dit kan gevizualiseerd worden via een geometrische interpretatie van het scalair product
van een willekeurige vector met één van de basisvectoren. Volgens de definitie is
r r
r
r r
r r
a • e1 = a e1 cos(a , e1 ) Maar er geldt ook a • e1 = a1 . Hieruit volgt
r
r r
r r
r
r
a1
a1 = a e1 cos(a , e1 ) ⇒ r = a cos(a , e1 ) = proj ( a → e1 )
e1
De loodrechte projectie van een willekeurige vector op één van de coordinaatassen is
gelijk aan de component op die as gedeeld door de grootte van de corresponderende
basisvector. Als we in de tabel de data van rij 8 delen door de gegevens van rij 3 dan
vinden we de data van rij 6.
We berekenen ook de lengte van OP in beide stelsels. Uit de informatie van de
r
r
g1 = e1
1 1
basisvectoren r
en de expressie
r
r vinden we de metrische tensor g ij =
g 2 = e1 + 2e2
1 5
r r
r
r
voor de vector OP, namelijk O P = g1 + 1 / 2 g 2 = x i g i . De lengte van deze vector kan nu
worden berekend als
OP = g ij ( x i ) 2 = ( x 0 ) 2 + 0.5 x à x1 + 1.5( x 2 ) 2 = 1 * 1 + 1 * 0.5 + 1 * 0.5 + 5 * (1 / 4) = 3.25
r
r
r
g 1 = e1 − (1 / 2)e2
We doen nu hetzelfde voor de contravariante basis r 2
en de metrische
r
g = (1 / 2)e2
r
5 − 1
r
r
r
tensor g ij = 1 / 4
. Er geldt dat O P = 1.5 g 1 + 3.5 g 2 = xi g i en we vinden voor de
−1 1
lengte van OP
OP = g ij ( x i ) 2 = 1 / 4 5 * x 02 − 1x 0 x1 + 1 * x12 = 1 / 4 5 * 1.5 2 − 1 * 1.5 * 3.5 + 1 * 3.5 2
[
]
[
]
= 1 / 4[5 * 2.25 + 3.5( −1.5 − 1.5 + 3.5] = 1 / 4[11.25 + 1.75] = 13 / 4 = 3.25
Er is nog een derde manier die gemakkelijker is, namelijk door een combinatie van
covariante en contravariante componenten a1 a 1 + a 2 a 2 = 1 * 1.5 + 0.5 * 3.5 = 3.25 ■
1.5 Duale ruimte: co-vector of éénterm
Voor een gegeven vectorruimte V over een veld F van reele getallen (scalars) kan een
zogenaamde duale ruimte V* worden gedefinieerd waarvan de elementen covector of
eenterm (one-form) worden genoemd. In het vorige hoofdstuk is deze reeds
geintroduceerd op een constructieve manier, meer bepaald via de constructie van een
r r
r r
duale basis. Deze was gedefinieerd als e i (e j ) = δ ij of e i • e j = δ ij . Zoals verder blijkt
is dit een voorbeeld van een lineaire functie, namelijk een éénterm. In dit hoofdstuk
zullen we de duale vectorruimte vanuit het standpunt van een alternatieve algebraische
methode benaderen die gebaseerd is op een lineaire functie van vectoren.
Een éénterm is gedefinieerd als een lineaire functie die één vector afbeeldt op één reeel
getal.
Net zoals een vector aangegeven wordt door een pijl wordt een covector aangegeven met
r
een symbool boven een variabele naam, te weten een tilde: dus ~p ( a ) stelt een functie p
11
voor, d.w.z. een voorschrift of een regel die het verband geeft tussen inputs (vectoren) en
outputs (scalars). Een lineaire functie betekent dat
r
r r
r
r r
~
p (a + b ) = ~
p (a ) + ~
p (b ) _ voor _ alle _( a , b ) ∈ Vectorruim te
r
r
r
~
p (ka ) = k~
p (a ) _ voor _ alle _(a , ) ∈ Vectorruim te _ en _ k ∈ veld
Hieruit volgt associativiteit en commutativiteit zodat ééntermen een vectorruimte vormen
zodat componenten en bijhorende basis kunnen worden gedefinieeerd. We beginnen met
de componenten. Deze zijn gedefinieerd als een projectie op de coordinaatassen. Ze
worden genoteerd als pi en berekend door de functie p toe te passen op de basisvectoren
r
van V: p i = ~p (ei ) . Hieruit volgt voor een willekeurige vector a dat
r
r
~
p (a ) = ~
p (a λ e ) = a λ p Vervolgens definieren we een basis
λ
λ
ω~ 0 = (1,0,0,0) ω~ 1 = (0,1,0,0) ω~ 2 = (1,0,0,0) ω~ 3 = (0,1,0,0)
zodat elke éénterm kan worden geschreven als een lineaire combinatie van de
r
r
p (e j ) = p i ω~ i (e j ) of
componenten ~
p = p i ω~ i . Toepassen op de basisvectoren e i geeft ~
r
~
p j = pi ω~ i (e j ) . Omdat dit moet gelden voor alle mogelijke pi volgt hieruit dat
r
r
ω~ i (e j ) = δ ij . Hieruit volgt ~p (e j ) = pi δ ij = pi
Vizualizering
Als x, y en z de coordinaten voorstellen in een 3 dimensionale ruimte kan een éénterm als
volgt worden gevisualiseerd.
z
z
z
1
0
2
y
y
y
-1
x
0
x
1
1
2
0
x
Figure 4 Voorbeelden van lineaire functies in 3D voor λ=0,1,2
Voor een gegeven waarde van λ kunnen we de subset van vectoren beschouwen die
hieraan voldoen. Deze subset heeft dus één dimensie minder an de vectorruimte en vormt
dus een hyperoppervlak. Dus in een 3D ruimte gaat het over een vlak en in een 2D ruimte
over een rechte. Door λ te varieren bekomen we een set van parallelle vlakken:
c1 x + c 2 y + c3 z n = λ voor verschillende waarden van λ (levels). In een n dimensionale
ruimte hebben we parallelle hyperplanes. De eenvorm geeft niet alleen de richting van de
vlakken aan maar ook hun afstand.
12
y
y
P
1
P
1
e
e
x
O
e
2
1
x
3
O
e
2
1
3
Figure 5 Een 2 dim voorbeeld in een rechthoekig assenstelsel. Dezelfde vector OP=(3,2) is getoond
r
p = ϖ~ 0 + ϖ~ 1 ⇒ (1,1) _ zodat _ ~p (OP ) = 1 * 3 + 1 * 2 = 5 en
met twee verschillende eentermen ~
r
rechts is ~
p = 2ϖ~ 0 + ϖ~ 1 ⇒ (2,1) _ zodat _ ~p (OP ) = 2 * 3 + 1 * 2 = 7
g2
g2
g1
g1
O
P
1
P
1
1
O
2
1
2
Figure 6 Zelfde situatie als in de vorige figuur maar in een scheef assenstelsel. Links toont 2 gelijke
assen en rechts twee ongelijke. In de linker en rechter figuur geldt respectievelijk dat
r
~
p = (1,1) _& _ OP = (1,1) _ zodat _ ~
p (OP ) = 1 * 1 + 1 * 1 = 2
r
p = (1,1) _& OP = (1,0.5) _ zodat _ ~
p (OP ) = 1 * 0.5 + 1 * 1 = 1.5
1.6 Samenvatting vectoren
Samenvattend kunnen we stellen dat het belangrijk is een duidelijk onderscheid te maken
tussen de vector, de basis en de componenten. De vector representeert vaak een fysische
grootheid, die vaak invariante is (onafhankelijk van de coordinaten) en wordt bepaald
door de basis en de componenten die beiden wel afhangen van de coordinaten. De
bedoeling is om deze afhankelijkheden zodanig te maken dat ze elkaar opheffen
waardoor de vector als geheel invariant wordt. Er zijn nu twee mogelijkheden: een
covariante basis met contravariante componenten of omgekeerd, een contravariante basis
13
met covariante componenten. In de notatie worden de covariante elementen voorgesteld
door lagere indices de contravariante door hogere. In de notatie voor een vector blijkt ook
de combinatie van lagere indices met hogere: v=v1e1+v2e2+v3e3=v1e1+v2e2+v3e3
Dit blijft gelden als we de beschrijving geparametriseerd maken.
Voorbeeld: Stel dat we even terug gaan naar het voorbeeld van sectie 1.4 en dat we de
lengte van de basisvectoren parametriseren met een factor c. Dus we kiezen als
basisvectoren g1=(c,0) en g 2=(c,2c). We passen de bovenstaande techniek toe om de
tweede basis te vinden: g 1=(1/c,-0.5/c) en g2=(0,0.5/c). Een vector OP (met als
Cartesische coordinaten (1.5,1)) heeft als componenten in de eerste basis (1/c,0.5/c) en in
de andere basis (1.5c, 3.5c). ■
Hieruit volgt de verklaring van de terminologie: als het maatgetal van de coordinaatassen
met een factor c groter worden dan worden de covariante componenten met dezelfde
factor groter en de contravariante met dezelfde factor c kleiner. Hieruit volgt verder dat in
combinaties van een covariante grootheid met een contravariante de veranderingen elkaar
opheffen.
Het parametriseren van de basisvectoren is natuurlijk maar een beperkte vorm van
flexibiliteit. In het volgende hoofdstuk maken we de stap naar willekeurige coordinaat
transformaties.
2. Definitie van een tensor
2.1 Wat is een tensor?
Een tensor is een veralgemening van een vector. We beginnen met een tensor van rang 1.
In dit geval kan een vector beschouwd worden als een tensor. In een vectorruimte V met
r
n dimensies is een basis gegeven {g i i = 1,2...n}, en heeft een vector a als componenten
(a1, a2, ... an). Een tensor wordt gespecificeerd door de gecombineerde informatie van een
basisvector met de bijhorende component. Voor een vector is dit niet zo spectaculair
r
r
r
r
omdat we gewend zijn te schrijven dat A = a i g i = a 1 g 1 + a 2 g 2 . Er is 1 index en 1 basis
vector per component. Dit is schematisch voorgesteld in Fig 6 (a) en (b).
2.2 Definitie van een (2,0) tensor
In dit geval vertrekken we van een tensorproduct V ⊗ V . Een voorbeeld is de reeds
eerder genoemde spanningsvector, T=xy, waarbij x en y twee vectoren zijn.
Bijvoorbeeld, een vector voor de kracht (blauw) en een vector loodrecht op de oppervlak
(rood). Er geldt (2D)
r
r
r
r
r r
r r
r r
r
r
T = xy = ( x1 g1 + x 2 g 2 )( y 1 g1 + y 2 g 2 ) = x1 g1 y1e1 + x1 g1 y 2 g 2 + x 2 g 2 y 1 g1 + x 2 g 2 y 2 g 2 .
Dit kan herschreven worden als
r
r
r
r
r r
Equation 14
T = t ij g i g j = t 11γ 11 + t 21γ 21 + t 12γ 12 + t 22γ 22
14
r
r r
waarbij γ ij = g i g j als een nieuwe basis gezien kan worden. De focus ligt op combinaties
r
r
van 2 basisvectoren {g i ⊗ g j i, j = 1,2}. We maken dus combinaties van rood met blauw,
beschouwen dit als nieuwe basis en definieren een component tij met twee indices.
r
g2
(a)
(b)
(c)
r
g1
Figure 7 Combinaties van basis vectoren en componenten in een twee-dimensionale vectorruimte
(b) is een vector of een tensor van rang 1 (1 index en 1 basisvector per component.) (c) een tensor
van rang 2 (2 indices en 2 basisvectoren per component.)
Voor een tensor van rang 2 zijn er 2 indices en 2 basisvectoren per component (2D). Als
de dimensie van de vectorruimte gelijk is aan 2 zijn er 4 combinaties mogelijk
(xx,xy,yx,yy) die getoond worden in Fig (c) en die overeenkomen met de vergelijking.
Als de dimensie verhoogt van 2 naar 3 zijn er 9 basisvectoren (comb 2 uit 3).
r r
r r
r r
t 11 g 1 g 1 + t 21 g 2 g 1 + t 31 g 3 g 1 +
r
r r
r r
r r
r r
T = t ij g i g j = t 12 g 1 g 2 + t 22 g 2 g 2 + t 32 g 3 g 2 + Equation 15
r r
r r
r r
t 13 g 1 g 3 + t 23 g 2 g 3 + t 33 g 3 g 3
Als vervolgens de rang verhoogt van 2 naar 3 zijn er 3 indices, en 3 basisvectoren per
component zodat er 27 combinaties mogelijk zijn.
r
g2
r
g1
r
g3
Figure 8 Voorbeeld: spanning in een voorwerp. Beschouw een oppervlak (snede) die gekenmerkt
wordt door een vector loodrecht op de oppervlak (rood). Op elk oppervlak werkt een kracht (blauw)
volgens elk van de drie richtingen. Voor een volledige karakterisatie van alle krachten op elk
oppervlak zijn er dus twee indices nodig en 9 componenten.
Dit kan op dezelfde manier gebruikt worden voor contravariante basisvectoren, dus voor
r
rj r r
r
r r
r r
γ ij = g i g j evenals voor gemengde vormen. γ i j = g i g j en γ i = g i g j
Tensoren stellen fysische waarden voor. Voorbeelden zijn: voor rang 0 (scalar) gaat het
over temperatuur, tijd,massa, dichtheid ...Voor rang 1 (vector) gaat het over snelheid,
kracht,kracht en versnelling ...Voor rang 2 (matrix) gaat het over spanning
15
2.3 Definitie van een (m,n) tensor
Definitie: product van vectorruimtes
Als V en U twee vectorruimtes zijn is het Cartesisch product UxV gedefinieerd als de
verzameling geordende paren (u,v) zodat u tot U behoort en v tot V. Als we daar nog een
som en een product aan toevoegen zodat
(p,q)+(r,s)=(p+r,q+s) en a(p,q)=(ap,aq)
dan noemen we dit een productruimte U ⊗ V
Definitie: tensor van rang 2 of groter
Een tensor is een geometrisch object dat een lineaire relatie beschrijft tussen scalars,
vectors en andere tensoren. Gegeven een verzameling vectorruimtes {V1, ... Vk} over een
gemeenschappelijk veld F evenals de duale ruimtes V* een (m,n) tensor is gedefinieerd
als
Tnm (V ) = V ⊗ V L ⊗ V ⊗ V * ⊗ L ⊗ V *
m
n
■
Elke index heeft een range van 1 tot de dimensie van de overeenkomstige vectorruimte en
een tensor is dus ook een set van km+n getallen. Elke index is gekoppeld aan een van beide
transformatie regels. Zo ontstaan dus gemengde vormen. Bijvoorbeeld, Akij is een m=2covariante, n=1 contravariante tensor van rang 3.
r
r r
r r
rr
r
Een rang 2 tensor kan op 4 manieren bestaan: eµ ⊗ eν , e µ ⊗ e ν , e µ ⊗ eν eµ ⊗ e ν of met
r
r
r
r
r
r
r
r
componenten E µν eµ ⊗ eν , E µν e µ ⊗ e ν , Gνµ e µ ⊗ eν , Gνµ eµ ⊗ e ν Het resultaat is een tensor g
die een lineaire map definieert van twee vectors naar een getal zijnde het scalair product;
r r r r
g (a , b ) = a • b = gαβ a α b β . Een tensor van rang 3 is een lineaire map van 3 vectoren naar
r r r
r r r
γ
getallen, bijvoorbeeld t (a , b , c ) = tαβ a α b β cγ maar ook t (a , b , c ) = tαβγ a α b β c γ We kunnen
van de ene expressie naar de andere door cγ = g γδ c δ . Als α=1..3 en β=1..4 en γ=1..2 dan
heeft deze tensor 24 elementen/getallen.
Een tensor is lineair in al de argumenten. Bijvoorbeeld, voor het eerste argument geldt
r
r
T (λa ,...) = λT (a ,...)
r
r r
r
T (a + b ,....) = T (a ,....) + T (b ,....)
Idem voor de andere argumenten.
3 Kromlijnige (curvilineaire) coordinaten
3.1 Intro
Dankzij het gelijkwaardigheidsprincipe is het altijd mogelijk in een willekeurig
zwaartekrachtveld een lokaal inertiaalsysteem te definiëren waarin plaatselijk de SRT
geldt. Als we de vergelijkingen zodanig kunnen opschrijven dat we heen en weer kunnen
16
transformeren tussen dit locale stelsel zonder zwaartekracht en het globale stelsel (dat
niet Cartesisch hoeft te zijn) met zwaartekracht dan zijn we dus een hele stap vooruit.
Tensoren zijn belangrijk omdat ze hierbij een centrale rol vervullen vermits ze het
mogelijk maken objecten, functies, vergelijkingen en formules op te schrijven op een
dusdanige manier dat ze onafhankelijk worden van de coordinaten. Hiermee is bedoeld
dat de geldigheid in één coordinatenstelsel voldoende is om om de geldigheid ook in
andere stelsels te garanderen.
Vanuit dit standpunt staan coordinaatstelsels en transformaties tussen deze stelsels
centraal. Daarbij nemen we aan dat we vertrekken van een Cartesisch referentiestelsel. In
een dergelijk stelsel zijn de assen rechtlijnig. Dan kan elk punt in de ruimte worden
geprojecteerd evenwijdig met deze assen zodat er een één-éénduidig verband is met een
n-tal. Als we een ander stelsel kiezen, mogelijks niet lineair, vinden we een ander n-tal.
Een functie T die binnen zijn domein een overeenkomst aangeeft tussen beide, wordt een
algemene coordinaattransformatie genoemd. Als T lineair is spreken we over een affiene
transformatie en in het andere geval over curvilineaire coordinaten waarbij we aannemen
dat de tweede partiele afgeleiden van T bestaan en continu zijn.
Een belangrijke opmerking is dat de metriek van de ruimte en de keuze van de
coordinaten twee verschillende zaken zijn en dus losgekoppeld van elkaar. We bespreken
eerst hoe we tot coordinaatvlakken en assen komen vertrekkende vanuit de functies die
het verband tussen de coordinaten aangeven.
3.2 Vector functies en afgeleide van een vector
Vector functies zijn functies die als input een vector hebben en als output een scalar of
een vector. De vector met het beginpunt in de oorsprong, is gespecificeerd door de
componenten als functie van een parameter te geven, dus als
r
r
r
r
r (λ ) = x(λ )e x + y (λ )e y + z (λ )e z .
In dit geval hebben we te maken met een aantal vectoren voor de verschillende waarden
van λ die een gemeenschappelijk beginpunt hebben in de oorsprong van het assenstelsel
en waarvan de eindpunten een curve beschrijven. De parameter geeft de positie aan op de
curve. Eenmaal functies gedefinieerd kunnen we over afgeleiden spreken. Als de vector
ontbonden is in zijn componenten dan wordt de afgeleide berekend als
r
dr dx r
dy r
dz r
=
ex +
ey +
ez
dλ dλ
dλ
dλ
Geometrisch bekeken is het resultaat van dergelijke afgeleide een vector die raakt aan de
curve.
We kunnen nu specifieke keuzes maken voor de parameter λ. Als we de booglengte
r drr
de
kiezen, gemeten vanaf een gegeven punt op de curve, dan stelt de afgeleide T =
ds
eenheids raakvector voor, d.w.z. een eenheidsvector waarvan de richting gelijk is aan de
raaklijn aan de curve. Als we voor de parameter λ de tijd t kiezen, dan stelt de
17
r
r
afgeleide v = dr dt de snelheids-vector voor2. De snelheidsvector heeft dus in beide
r
r
r dr ds
gevallen dezelfde richting maar de grootte is verschillend. Er geldt dus v =
= vT .
ds dt
Dus de grootte van v is ds/dt en de richting is de eenheids raakvector.
z
T
r
r0
x
y
Figure 9 Raaklijn aan een curve beschreven door het eindpunt van een vector r die functie is van een
parameter λ.
3.3 Meerdere parameters en coordinaten
Als x,y en z functies waren van één enkele parameter dan is er 1 vrijheidsgraad en wordt
er een curve gegenereerd. Hebben we twee vrije parameters dan spannen deze een
oppervlak op (een 2D deelruimte). Hebben we drie parameters dan spannen deze de
volledige oorspronkelijke ruimte op en is het een coordinaten transformatie.
We voeren nu twee veralgemeningen door: een wat betreft de notatie en een tweede
betreffende de dimensie. In verband met de notatie noteren we de coordinaten met een
nummer omdat dit later compactere uitdrukkingen mogelijk maakt. We schrijven dus (x1,
x2, x 3) in plaats van (x,y,z). Verder nemen we aan dat we de transformatie beschrijven
van een Cartesisch stelsel (x1, x2, x3) naar een algemeen stelsel met bijvoorbeeld
kromlijnige coordinaten, dat we noteren met een accent als (x’1, x’2, x’3)
2
Omzichtigheid is geboden als we de grootte en richting van de snelheid apart willen afleiden zoals blijkt
uit het volgende voorbeeld waarin dezelfde ruimtelijke curve beschreven wordt met verschillende functies.
Bijvoorbeeld x1(t)=t; y1(t)=t2 stelt een parabool voor y1=x12 en x2(t)=2t; y2(t)=4t2 stelt dezelfde parabool
voor y2=x22 maar toch is de snelheid hoger.
18
z’-as
y’-as
x’-as
Figure 10 Een coordinaat-as is een raaklijn aan een coordinaatlijn die ontstaat als doorsnede van
twee coordinaatvlakken
Als we één veranderlijke constant houden blijven er dus twee vrije variabelen over die
een coordinaatvlak opspannen, dat mogelijkerwijze gekromd is. Bijvoorbeeld, wanneer
we in de hoger genoemde drie-dimensionale ruimte een constraint toevoegen, zeg
x’3=constant, dan vinden we het coordinaatvlak opgespannen door x’1 en x’2. Door het
toevoegen van een tweede constraint, bijv x’2 = constant vinden we een tweede
coordinaatvlak. De plaats waar twee dergelijke vlakken elkaar snijden is een (gekromde)
coordinaatcurve.
De tweede veralgemening betreft de dimensie waar we de klassieke 3D ruimte
veralgemenen tot een n-dimensionale ruimte. Stel dat we beginnen met een Cartesisch
stelsel waarin een transformatie is gedefinieerd zodat nieuwe x’a coordinaten functies zijn
van de cartesische coordinaten xa
x' a = x ' a ( x 1 , x 2 , K x n )
waarbij a=1...n. We nemen ook aan dat de inverse functies bestaan
x a = x a ( x '1 , x' 2 , K x' n )
Bij uitbreiding en veralgemening naar n dimensies vinden we een coordinaat-as wanneer
er n-1 constraints opgelegd zijn en er dus nog één vrije coordinaat is.
In de meer algemene notatie met genummerde coordinaten zijn de coordinaatcurves
gedefinieerd door alle x’b constant te houden behalve één en de nieuwe basis wordt
gegeven door af te leiden naar die ene coordinaat die niet constant is
r
∂x a r
e 'b = b ea
∂x '
Equation 16
Vervolgens definieren we de basisvectoren (niet gekromd). Er zijn twee opties: als we de
basisvectoren rakend aan de assen kiezen, komen we uit bij een covariante basis
19
(genoteerd als x’a) en als we ze loodrecht kiezen op de coordinaatvlakken dan hebben we
het over een contravariante basis (genoteerd als x’a). Verder maken we een onderscheid
tussen basisvectoren afhankelijk van het feit dat de lengte gelijk is aan 1 of niet die we
benoemen als gewone ‘basisvectoren‘ of ‘unitaire basisvectoren ‘.
3.4 Voorbeeld: covariante basis voor 2D poolcoordinaten
De coordinaten zijn r en φ. De coordinaatlijnen zijn de lijnen waar elk van de coordinaten
om beurt constant wordt gehouden. Als we r constant houden vinden we een
concentrische cirkel en als we φ constant houden vinden we een radiale lijn.
In elk punt van het vlak kunnen we nu de raaklijn nemen aan elke curve en alzo twee
basis vectoren definieren . Voor een gegeven punt P noteren we deze basisvectoren als
r
r
e rP en eϕP zodat de afhankelijkheid van P duidelijk is, zowel wat betreft richting als
grootte.
v
eϕP
r
P
v
erP
O
Figure 11 Constructie van een covariante coordinaatbasis voor poolcoordinaten.
Voor de berekening hiervan gaan we terug naar technieken om raaklijnen te berekenen.
Als een curve in parametervorm x=x(t) en y=y(t) gegeven is dan is de raakvector gelijk
r
r
r
aan u = ( dx dt ) e x + ( dy dt ) e y . Als x = x( r , ϕ ) = r cos(ϕ ) en y = y (r , ϕ ) = r sin(ϕ ) en als
de curve van de radiale lijn gegeven wordt door φ=constant dan wordt de raakvector
gegeven door
r
r
r
r
r
erP = (∂x ∂r ) e x + (∂y ∂r ) e y = cos(ϕ )e x + sin(ϕ )e y .
Equation 17
r
Om eϕP te berekenen wordt de curve gegeven door r=constant en dan geldt
r
r
r
r
r
eϕP = (∂x ∂ϕ ) ex + (∂y ∂ϕ ) e y = − r sin(ϕ )ex + r cos(ϕ )e y
Equation 18
Beiden zijn gespecificeerd met het Cartesisch stelsel als referentiekader. De grootte van
r
r
erP is gelijk aan 1 en van eϕP aan r. ■
20
Als het uit de context voldoende duidelijk is dat het gaat om een veld dan zullen we de
superscripts P en Q weglaten om een overvloed aan indices (indicitis) te vermijden.
r r
r r
(e1 , e2 ) = (ex , e y )
( x 1 , x 2 ) = ( x, y )
Voor alle duidelijkheid is in het voorbeeld r r
r r
(e '1 , e '2 ) = (er , eϕ ) ( x'1 , x' 2 ) = ( r , ϕ )
3.5 Voorbeeld: contravariante basis voor 2D poolcoordinaten
We schrijven dus de contravariante basis als een linaire combinatie, vertalen de
constraints en lossen het stelsel op. Dit geeft het volgende resultaat.
r
r
r
er = cos(ϕ )ex + sin(ϕ )e y
r
r
r
eϕ = − r sin(ϕ )e x + r cos(ϕ )e y
r
r
r
e r = ae x + be y
r
r
r
⇒ e ϕ = cex + d e y
r
r
r
e r = cos(ϕ )ex + sin(ϕ )e y
r
r
r
e ϕ = ( − sin(ϕ ) / r )e x + (cos(ϕ ) / r )e y
⇓
r r
e r • er
r r
e ϕ • eϕ
r r
e r • eϕ
r r
e ϕ • er
⇑
= a cos(ϕ ) + b sin(ϕ ) = 1
a(cos(ϕ ) + tg (ϕ ) sin(ϕ )) = 1
= − cr sin(ϕ ) + dr cos(ϕ ) = 1
= − ar sin(ϕ ) + br cos(ϕ ) = 0
dr (tg (ϕ ) sin(ϕ ) + cos(ϕ )) = 1 d = cos(ϕ ) / r
b / a = tg (ϕ )
b = sin(ϕ )
= c cos(ϕ ) + d sin(ϕ ) = 0
c / d = −tg (ϕ )
a = cos(ϕ )
c = − sin(ϕ ) / r
Het kan ook op een tweede manier via het scalair product. Eerst bepalen we de richting.
r
r
r
r
Vermits er en eϕ loodrecht op elkaar staan is de richting van e r dezelfde als die van eϕ
r
r
en hetzelfde geldt voor e ϕ en er . Vervolgens bepalen we de grootte. We vinden
r r
r
r r
r
er e r = 1 ⇒ e r = 1 en eϕ e ϕ = r 2 ⇒ e ϕ = 1 / r ■
We merken nog op dat basisvectoren een uitzondering zijn , in deze zin dat gewone
vectoren als object niet veranderen (bijv in grootte) bij een transformatie maar
basisvectoren wel.
3.6 Coordinaatruimte en metrische ruimte
Merk op dat het meten van afstanden en dus de link met fysische grootheden zoals
afstand en tijd, niet triviaal is in curvilineaire coordinaatruimte. Zo is, bijvoorbeeld, de
afstand tussen twee punten P en Q in 2D poolcoordinaten {P (r1 , ϕ1 ), Q (r2ϕ 2 )} een vrij
complexe formule [ d 2 = r12 + r22 − 2r1 r2 cos(ϕ 2 − ϕ 1 ) ]. Bovendien hebben sommige
coordinaten niet de semantiek van een afstand, bijvoorbeeld een hoek.
Merk bovendien op dat deze basisvectoren een vector veld vormen waarbij de lengte
verschillend kan zijn van 1 en waarbij ze bovendien afhangt van het gekozen punt. Deze
twee observaties wijzen er op dat de numerische waarden van vector en tensor
componenten niet de fysische waarden zijn die gemeten worden. Integendeel, ze geven
alleen de overeenkomst tussen de locaties van de coordinaten aan. Het is een pure
coordinaatruimte. Dit geldt ook voor andere vectoren zoals de snelheid. De figuren geven
21
het aantal gridlijnen per seconde weer of m.a.w. de coordinaatsnelheid en niet de fysische
snelheid.
Om de link te maken met fysische grootheden moeten we de metriek definieren. Dit
betekent dat we de vectoren kunnen uitdrukken ten opzichte van een gegeven fysische
eenheid van lengte. We berekenen de fysieke afstand tussen punten die zich op een
infinitesimale coordinaat afstand van elkaar bevinden (lijnelement).
Bij een transformatie beschouwen we één en hetzelfde punt en beschrijven het in beide
stelsels. We nemen aan dat er een positie vector gegeven is waarvan de oorsprong altijd
ligt in de oorsprong van het assenstelsel maar waarbij het eindpunt beweegt, dat wordt
r
r
beschreven als r ( x1 , x 2 , x 3 ) = r ( x '1 , x ' 2 , x '3 ) . Daaruit volgt de differentiaal
r
r
r
r ∂r
∂r
∂r
dr =
dx'1 +
dx' 2 +
dx' 3
∂x'1
∂x ' 2
∂x ' 3
r
∂r
De vector
raakt aan de coordinaat-as x’1 .maar de grootte is in het algemeen niet
∂x '1
gelijk aan 1. De interpretatie in termen van fysisch meetbare grootheden betekent dat we
r
∂r
moeten berekenen. Als we expliciet willen maken
de lengte of de schaalfactor h1 =
∂x '1
)
dat het gaat om een eenheidsvector gaat gebruiken we het symbool e1 . Dan kan dr
r
)
)
)
geschreven worden als dr = h1 dx '1 e '1 + h2 dx' 2 e ' 2 + h3 dx'3 e ' 3
r r
Vervolgens geldt ds 2 = dr • dr = ( h1 dx '1 ) 2 + ( h2 dx ' 2 ) 2 + (h3 dx '3 ) 2
De schaalfactor kan worden uitgedrukt in functie van de Cartesisch referentiesysteem als
r
r
∂( x j e j ) ∂x j r
∂r
hi =
ej
=
=
∂x 'i
∂x 'i
∂x ' i
r
r
∂ ( x j e j ) ∂x j r
∂r
Hieruit volgt hi =
=
=
ej
∂x' i
∂x' i
∂x' i
Hetzelfde resultaat kan worden gevonden op een alternatieve algebraische manier. We
gaan uit van de uitdrukking voor de infinitesimale afstand ds (het lijnelement) in
orthogonale cartesische coordinaten (xi) en transformeren dit naar de curvilineaire
coordinaten (qi). We berekenen eerst dx, dy en dz uitrekenen en tenslotte ds2.
ds 2 = η ij dx i dx j
→ ds '2 = g ij dx'i dx' j
Voorbeeld: 2D poolcoordinaten : bereken het lijnelement
We doen dit op twee manieren: (i) via vector rekenen en (ii) analytisch
(i)
vectorrekenen
We beschrijven een transformatie van ( x, y ) ⇒ ( r , ϕ ) . De unitaire basisvectoren in een
punt P worden berekend als
r
r
)
er = cos(ϕ )ex + sin(ϕ )ey
r
r .
)
eϕ = − sin(ϕ )ex + cos(ϕ )e y
22
Beide vectoren staan loodrecht op elkaar en hun lengte is gelijk aan 1. Merk ook op dat
)
∂er )
= eϕ . Vervolgens schrijven we de expressie voor de
hieruit reeds volgt dat
∂ϕ
positievector v
r
r
r
)
v = r cos(ϕ )ex + r sin(ϕ )ey = rer
Dit is een beetje raar omdat φ er niet in voorkomt maar dit is slechts schijn omdat de
basisvectoren afhangen van φ. Vervolgens berekenen we het lijnelement
r
r
)
)
r
∂r
∂r
∂er
∂er
)
)
)
)
)
dv (r , ϕ ) =
dr +
dϕ = (er + r
)dr + r
dϕ = (er + 0) dr + reϕ dϕ = drer + rdϕeϕ
∂r
∂ϕ
∂r
∂ϕ
(ii) analytisch
We illustreren wat hieraan gedaan kan worden aan de hand van het voorbeeld van
poolcoordinaten.
∂x
∂x
dx =
dr −
dφ = cos(φ )dr − r sin(φ )dφ
∂r
∂φ
∂y
∂y
dr −
dφ = sin(φ )dr + r cos(φ ) dφ
dy =
∂r
∂φ
ds 2 = dx 2 + dy 2 = dr 2 + r 2 dφ 2 = g rr dr 2 + g ϕϕ dφ 2
Stel een vector = (3/5,4/(5r)) gegeven in 2D poolcoordinaten. Bereken de lengte
3
3
2
3 4 1 0 5 3 4 5
X =
=1
=
2
5 5r 0 r 4 5 5r 4r
5r
5
2
T
dx i dx j matrixvorm dx i
dx j
ds
(Schaum p 53)
→
g ij
= g ij
dt dt
dt
dt
dt
De basisvectoren hebben een lengte die verschilt van één. Zodoende voeren we een
schaalfactor in. http://en.wikipedia.org/wiki/Polar_coordinate_system
4. Tensor : tweede definitie
Tensoren van nulde orde zijn scalars en die blijven bij een transformatie onveranderd.
Het gaat over één en hetzelfde punt P dat op twee manieren wordt geschreven f(x)=f’(x’)
4.1 Tensoren van eerste orde
r
Gegeven een vector veld V = (T i ) kan de vraag worden gesteld wat er gebeurt bij
transformatie van de coordinaten. Met andere woorden de componenten van V
retourneren elk een scalar en worden geschreven als (T1, T2,... Tn ) in het xi systeem en
als T’1, T’2,... T’n in het x’i syteem.
Definitie: [ Contravariante vector]
23
Een vectorveld V is een contravariante tensor van orde één (of een contravariante vector)
als de componenten Ti in x en T’i in x’ voldoen aan
T 'i ∂x'i
∂x'i r
i
T
=
of
T
'
=
T r ∂x r
∂x r
Equation 19■
Voorbeelden van contravariante vectoren zijn verplaatsing, snelheid, kracht en
versnelling.
Definitie: [ Covariante vector]
Een vectorveld V is een covariante tensor van orde één (of een covariante vector) als de
componenten Ti in x en T’i in x’ voldoen aan
T 'i =
∂x r
Tr
∂x'i
Equation 20 ■
Hint: pos of index = pos of primed coordinate
Dit is algemeen geldig zodat het dienst kan doen als een definitie van een covariante
grootheid (vector of tensor) van rang 1.
4.2 Tensoren van tweede orde
We beschouwen een vector veld V=(Vij), d.w.z. een matrix van scalaire velden Vij(x).We
nemen aan dat de componenten van V geschreven worden als Tij in het (xi ) syteem en als
T’ij in het (x’i ) syteem waarbij (xi ) en (x’i ) toegelaten coordinaatsystemen zijn.
Definitie: [ Contravariante vector]
Het matrixveld V is een contravariante tensor van orde twee als Tij in het (xi ) systeem en
∂x'i ∂x' j
■
als T’ij in het (x’i ) systeem voldoen aan de transformatiewet T 'ij = T rs r
∂x ∂x s
Definitie: [ Covariante vector]
Het matrixveld V is een contravariante tensor van orde twee als Tij in het (xi ) syteem en
∂x r ∂x s
als T’ij in het (x’i )voldoen aan de transformatiewet T 'ij = T rs
■
∂x'i ∂x' j
Definitie: [ Gemengde tensor]
Het matrixveld V is een gemengde tensor van orde twee, contravariant van orde één en
covariant van orde één, als T ji in het (xi ) syteem en als T 'ij in het (x’i ) voldoen aan de
transformatiewet T 'ij = Tsr
∂x'i ∂x s
■
∂x r ∂x' j
4.3 Invarianten
24
4.4 Berekening basis
Met de nieuwe definities voor tensoren kunnen we de basis in een curvilineair systeem
direct vinden door toepassing van de transformatieregels. De voorbeelden die hierboven
reeds gebruikt zijn (poolcoordinaten en schuine affien coordinaten) kunnen nu op een
alternatieve manier worden uitgewerkt.
Voorbeeld 1 [poolcoordinaten, tweede basis, tweede manier]
De transformatie formules met (x1, x2)=(x,y) en (x’1, x’2)=(r,φ) zijn
x = r cosϕ r = x 2 + y 2
Equation 21
y = r sin ϕ ϕ = bgtg ( y / x)
De covariante basis is reeds vroeger berekend als
r
r
r
r
r
erP = (∂x ∂r ) e x + (∂y ∂r ) e y = cos(ϕ )e x + sin(ϕ )e y
r
r
r
r
r Equation 22
eϕP = (∂x ∂ϕ ) e x + (∂y ∂ϕ ) e y = − r sin(ϕ )e x + r cos(ϕ )e y
We kunnen nu de contravariante basis ook via transformaties berekenen op een meer
rechtstreekse manier als volgt
r
r
r
r
r
e r = (∂r ∂x) ex + (∂r ∂y ) ey = cos(ϕ )ex + sin(ϕ )ey
Equation 23
r
r
r
r
r
e ϕ = (∂ϕ ∂x) ex + (∂ϕ ∂y ) ey = −(1 / r ) sin(ϕ )ex + (1 / r ) cos(ϕ )ey
r r
Men kan verifieren dat ei ' • e j ' = δ i 'j '
Een vector met componenten (v1,v2)= (v1,v2)=(x,y) in het rechthoekige stelsel heeft als
contra-variante componenten (v’1,v’2)=(vr, vφ)
dr 1 dr 2
v + v = x cos(ϕ ) + y sin(ϕ )
dx
dy
dϕ 1 dϕ 2
vϕ =
v +
v = ( − x / r ) sin(ϕ ) + ( y / r ) cos(ϕ )
dx
dy
vr =
Equation 24
en als covariante componenten (v’1,v’2)=(vr, vφ)
dx
dy
v1 + v 2 = x cos(ϕ ) + y sin(ϕ )
dr
dr
dx
dx
vϕ =
v1 +
v 2 = −rx sin(ϕ ) + ry cos(ϕ )
dϕ
dϕ
vr =
Equation 25
We kunnen verifieren dat v r er + vϕ eϕ = vr e r + vϕ eϕ = xex + y ey als volgt
25
[
]
v r er + vϕ eϕ = ( x cos(ϕ ) + y sin(ϕ )) cos(ϕ )ex + sin(ϕ )e y +
[
]
((− x / r ) sin(ϕ ) + ( y / r ) cos(ϕ )) − r sin(ϕ )ex + r cos(ϕ )ey = xex + y ey
[
]
vr e r + vϕ eϕ = ( x cos(ϕ ) + y sin(ϕ )) cos(ϕ )e x + sin(ϕ )e y +
[− rx sin(ϕ ) + ry cos(ϕ )][− (sin(ϕ ) / r )e x + (cos(ϕ ) / r )e y ] = xex + yey
■
Hierbij een overzicht van de verschillende opties aan de hand van het voorbeeld van
poolcoordinaten
.
r
r
r
r
r
r
e r = (∂r ∂x ) ex + (∂r ∂y ) e y
erP = (∂x ∂r ) ex + ( ∂y ∂r ) ey
cartesisch
r
r
r
r
= cos(ϕ )ex + sin(ϕ )e y
= cos(ϕ )ex + sin(ϕ ) ey
r
r
r
r
r
r
e ϕ = (∂ϕ ∂x ) ex + (∂ϕ ∂y ) e y
eϕP = (∂x ∂ϕ ) ex + (∂y ∂ϕ ) ey
r
r
r
r
= −(sin(ϕ ) / r )ex + (cos(ϕ ) / r )e y
= −r sin(ϕ )ex + r cos(ϕ )ey
r
r
r
ex = (∂r ∂x) er + (∂ϕ ∂x) eϕ
r
r
r
ey = (∂r ∂y ) er + (∂ϕ ∂y ) eϕ
Covariante basis
r
r
r
e x = (∂x ∂r ) e r + (∂x ∂ϕ ) e ϕ
r
r
r
e y = (∂y ∂r ) e r + (∂y ∂ϕ ) e ϕ
contravariante basis
orthogonaal
Figure 12 Vertrekkende van een orthogonaal cartesisch assenstelsel worden beide basissen gevonden.
In beide gevallen zijn ook de omgekeerde transformaties aangegeven die waarbij de rol van beide
coordinaten sets (x,y) en (r,φ) omgewisseld is. De uitwisseling tussen beide basissen onderling gebeurt
via de voorwaarden van orthogonaliteit.
Voorbeeld 2 [schuin assenstelsel]
r
r
We vertrekken van een rechthoekig assenstelsel (x,y) met als basisvectoren ex en e y .
Met dit stelsel als referentie definieren we een coordinaten transformatie naar een scheef
assenstelsel (x’,y’) als
x = x'+ y ' cosα
x ' = x − y / tgα
y = y ' sin α
y ' = y / sin α
De covariante basisvectoren worden berekend als
26
Equation 26
dx r
dy r
r
r
e1 = ' e x + ' e y = e x
dx
dx
r
dx r
dy r
r
r
e2 =
ex +
e y = (cos α )e x + (sin α )e y
dy '
dy '
Equation 27
en de contravariante als
r dx' r dx' r r
r
e1 =
ex +
e y = ex − (1 / tgα )e y
dx
dy
r
dy ' r dy ' r
e2 =
ex +
e y = (1 / sin α )e y
dx
dx
r r
Men kan verifieren dat ei • e j = δ i j
Equation 28
Een vector met componenten (v1,v2)=(x,y) in het rechthoekige stelsel heeft als
contravariante componenten
dx ' 1 dx' 2
v +
v = x − y / tgα
dx
dy
dy ' 1 dy ' 2
v 2' =
v +
v = y / sin α
dx
dy
v 1' =
Equation 29
en als covariante componenten
dx
dy
v1 + v 2 = x
dx'
dx
dx
dx
v2' =
v1 +
v 2 = (cos α ) x + (sin α ) y
dy '
dy'
v1' =
Equation 30
We kunnen verifieren dat v1' e1' + v 2 ' e2' = v1' e1' + v2 ' e 2' = xe1 + ye2 als volgt
v1' e1' + v 2 ' e 2' = ( x − y / tgα )e x + y / sin α (cos α e x + sin α e y ) = xe x + y e y
■
v1' e1' + v 2' e 2' = x (e1 − (1 / tgα )e 2 ) + ( x cos α + y sin α )(1 / sin α )e 2 = xe1 + y e2
4.5 Basisstelling van de tensorrekening
Stelling
Als een tensor vergelijking of identiteit waar is in één coordinaatsysteem dan is ze ook
waar in alle coordinaat systemen.■
k
k
k
Elke vergelijking of identiteit kan worden geschreven als Tij = Aij − Bij = 0 door alle
termen in het linker lid te brengen. Hierin kan 0 elke tensor representeren. Een
voorwaarde is dus dat we te maken hebben met tensoren. Dit kan op twee manieren
worden aangetoond:
27
1. via de transformatieregel
2. via de quotient regel. Als men kan aantonen dat het inwendig produkt TV een
tensor is voor alle V’s dan is T een tensor. Voorbeelden
a. Als TiVi invariant is (dus een scalar) voor alle Vi dan is Ti een tensor
b. Als TijVi=Ui componenten zijn van een covariante vector voor alle Vi dan
is Tij een tensor
c. Als TijUjVi invariant is (dus een scalar) voor alle Vi en Uj dan is Tij een
tensor
Vervolgens kan de bovenstaande stelling bewezen worden.
Voorbeeld (m=0, n=2)
Als in een coordinatensysteem xi een tensor Tij gelijk is aan 0 dan geldt in een
∂x p ∂x q
= 0 + 0 + ...0 ■
∂x ' i ∂x ' j
Dit is dus een gevolg van de vorm van de transformatie waarbij elke term in de som een
product is waarin de oorspronkelijke tensorcomponenten voorkomen. Transformaties
tussen tensoren worden alleen bepaald door het covariante of contravariante karakter van
de te transformeren grootheid. Dit geldt zowel voor de basis als voor de componenten.
coordinatensysteem x’i dat T 'ij = T ' pq
Voorbeeld
Als T jkli een tensor is en als T jkli = 2Tljki in het xi systeem dan geldt voor een willekeurig
systeem dat T 'ijkl = 2T 'iljk
We bewijzen dat T 'ijkl = 2T 'iljk in het x’ systeem. Daartoe schrijven we dit als een verschil
en moeten er twee voorwaarden vervuld zijn: het verschil moet een tensor zijn en er moet
een systeem bestaan waarin de componenten nul zijn.
i
r
s
t
∂x'i ∂x r ∂x s ∂x t
p ∂x ' ∂x ∂x ∂x
T ' −2T ' = T
− 2Trst p
∂x p ∂x' j ∂x'k ∂x'l
∂x ∂x'l ∂x' j ∂x'l
i
r
i
t
r
s
∂x s ∂x t
p ∂x ' ∂x
p ∂x ' ∂x ∂x ∂x
= Trst p
− 2Ttrs p l
∂x ∂x' j ∂x'k ∂x'l
∂x ∂x' ∂x' j ∂x'l
i
r
∂x s ∂x t
p
p ∂x' ∂x
= (Trst − 2Ttrs ) p
=0
∂x ∂x' j ∂x'k ∂x'l
i
jkl
i
ljk
p
rst
■
Invarianten
Objecten, functies, vergelijkingen of formules kunnen ook invariant zijn. Dit betekent dat
het reusltaat een scalar is en dus onafhankelijk van de gekozen coordinaten. Deze
grootheden hebben meestal een fundamentele fysische betekenis.
Stelling
Als Si en Ti de componenten voorstellen van, respectievelijk, een contravariante en
covariante vector dan is het scalair produkt een invariant.
28
E = S 'i T ' i = S r
∂x'i
∂x s
∂x' i ∂x s
r
•
T
=
S
T
= S r Ts δ sr = S r Tr = E ■
s
s
∂x r
∂x'i
∂x r ∂x'i
4.6 Tensor algebra
Twee tensoren mogen opgeteld worden indien ze beiden van hetzelfde type zijn. Het
resultaat is eveneens van dit type.
r
r r
r
r r
u = u ij g i g j & v = v ij g i g j
r r
r r
r r
r r
r
u + v = u ij g i g j + u ij g i g j = wij g i g j = w
u ij + v ij = w ij
Het directe product van twee tensoren is weer een tensor die alle contravariante en
covariante indices van de twee tensoren overneemt waarbij een index niet van type kan
switchen .
r
r r
r
r r
u = u ij g i g j & v = v kl g k g l
rr
r r
r r
r r r r
r r r r
r
u v = u ij g i g j v kl g k g l = u ij v kl g i g j g k g l = w ijkl g i g j g k g l = w
u ij v kl = w ijkl
Contractie: als een benedenindex en een bovenindex aan elkaar gelijk worden gesteld
(en dus gesommeerd wordt over de 4 waarden ervan), ontstaat een tensor met twee
indices minder. Dit proces wordt contractie genoemd:
Het omlaag(omhoog) halen van een index gebeurt dus met behulp van de metrische
tensor. Door het omhoog of omlaag halen van indices kan dezelfde tensor op 2N manieren
geschreven worden. Al deze tensoren bevatten dezelfde informatie; hierom wordt in het
algemeen hetzelfde symbool voor al deze tensoren gebruikt.
v i = g ik vk
vi = g ik v k
r
r
e i = g ik ek
r
r
ei = g ik e k
De gemengde metrische tensor is gelijk aan de Kronecker delta operator:
g nm = g ml g ln = δ nm
5 Conclusies
In dit hoofdstuk gaat het over tensorrekening en kromlijnige coordinaten. Beiden zijn
essentieel in de relativiteitstheorie
Tensorrekening is onontbeerlijk als we geen slaaf meer willen zijn van al dan niet
toevallig gekozen coordinaten maar integendeel een situatie van covariantie willen
29
bereiken waarin we vergelijkingen opschrijven waarvan de vorm dezelfde is (vorm
invariant). Deze zijn geldig in alle coordinaatstelsels en de verschillen beperken zich tot
een interpretatie van de variabelen (de relatie tussen fysische grootheden en
tensorcomponenten bijv de energie-impuls tensor), die aan de situatie is aangepast, en/of
een veralgemeende interpretatie van de operatoren.
Tensorrekenen is gebaseerd op het systematisch onderscheid tussen covariante en
contravariante tensoren. Dit onderscheid is ook in de notatie expliciet aangegeven via
upper en lower indices.
Kromlijnige wereldlijnen zijn een gevolg van versnellingen die in het systeem aanwezig
zijn. Als ze opduiken in een vlakke ruimte kan er een transformatie gevonden worden die
de coordinaatlijnen recht maakt. In een gekromde ruimte geldt dit niet.
We begonnen met vector velden die gedefinieerd waren in een 3D Cartesische ruimte.
Binnen deze context kan een algemene coordinaattransformatie gedefinieerd worden door
de (x,y,z) componenten in de Cartesissche ruimte uit te drukken als functies van de 3
nieuwe coordinaten (u,v,w). als (x’1, x’2, x’3)
r
r
r
r
r
r
r
r = x1 e1 + x 2 e2 + x 3 e3 = x1 ( x'1 , x' 2 , x' 3 )e1 + x 2 ( x'1 , x' 2 , x'3 )e2 + x 3 ( x'1 , x' 2 , x' 3 )e3
Hieruit kunnen vergelijkingen voor oppervlakken op curves worden afgeleid door één of
twee x’i-s constant te houden. Bijvoorbeeld een curve die de doorsnede voorstelt van de
vlakken x’2=constant en x’3=constant wordt geschreven als
r
r
r
r
r = x1 ( x'1 )e1 + x 2 ( x'1 )e2 + x 3 ( x'1 )e3
Partieel afleiden naar x’1 geeft de raaklijn aan de corresponderende coordinaatcurve. Een
set van basisvectoren is gegeven door af te leiden naar die ene coordinaat die niet
∂x'b r a
r
∂x a r
r
constant is e ' b = b e a en de duale basis door e ' b =
e
∂x a
∂x'
30
Appendix A: voorbeelden van curvilineaire coordinaten
De drie meest voorkomende curvilineaire coordinaat systemen zijn polaire coordinaten,
cylindrische en sferische.cylindrische
( x 1 , x 2 , x 3 ) = ( x, y , z )
( y 1 , y 2 , y 3 ) = (r,θ , z)
x = r cosθ r = x 2 + y 2
y = r sin θ θ = bgtg ( y / x)
z =θ
θ=z
sferische
( x1 , x 2 , x 3 ) = ( x, y, z )
( y 1 , y 2 , y 3 ) = ( ρ ,ϕ ,θ )
x = ρ sin ϕ cosθ
ρ = x2 + y2 + z 2
y = ρ sin ϕ sin θ ϕ = bg cos θ / x 2 + y 2 + z 2
z = ρ cosϕ
θ = bgtg ( y / x)
(
31
)
Appendix B: lineaire functie
Voor een gegeven vector ruimte V over een veld F kan een zogenaamde duale ruimte V*
worden gedefinieerd waarvan de elementen covector of éénterm(one-form) worden
r
genoemd. Een covector ω is een afbeelding van vectoren naar getallen. ω (V ) ⇒ ℜ
De duale vectoren vormen een vectorruimte vermits
r
r
r
(ω + η )(V ) = ω (V ) + η (V )
r
r
(aω )(V ) = a (ω (V ))
Hier zijn ω en η duale vectoren, a een getal behorende tot F en V een vector.
r r r
r
De duale ruimte heeft een duale basis e 1 , e 2 , e 3 ,..., e n . Deze zijn gedefinieerd als lineaire
r
r
r
r
functies in V, zijnde c1e1 + c2 e2 + c3e3 + ... + cn en . Voor de ci’s zijn een aantal keuzes
mogelijk. Bijvoorbeeld: allemaal gelijk aan 0, of gelijk aan 1 of een roterende 1 (allemaal
gelijk aan 0 behalve 1) etc... De i-de basisvector wordt berekend via
r r
r
r
r
e i (c1e1 + c2 e2 + c3 e3 + ... + cn en ) = ci .
r r
r r
In geval van de roterende 1 wordt dit e i (e j ) = δ ij of e i • e j = δ ij
Dit kan ook worden toegepast op de componenten v1 en v2 van een vector V zodat
r
r
ω = ω µ e µ met ω µ de componenten van de duale vector en e µ de basis. Dus we schrijven
r
r
r
r r
ω (V ) = ω µ e µ (V ν eν ) = ω µV ν e µ eν = ω µV ν δνµ = ω µV µ
Lineaire functies/mappings zijn functies waarbij de transformatiematrix alleen constante
getallen heeft. Daarbij kan ook een meetkundige interpretatie worden gegeven. Een
lineaire functie is zodanig dat, als de input lineair is (een vlak in 3D, een rechte in 2D), de
output ook. Voorbeelden in 2D zijn
{
cos(ϕ ) − sin (ϕ )
sin (ϕ ) cos(ϕ )
(a)
}
1 0
0 − 1
(b)
−1 0
0 1
(c)
2 0
0 2
(d)
0 0
0 1
(e)
Figure 13 Meetkundige interpretatie van lineaire functies (a) rotatie (b) spiegeling m de x-as
(c) spiegeling om de y-as (d) schaling (e) projectie op de y-as
W
W
W
v2
V
V
ω(V)
v1
ω( v 1)
ω(W)
ω(2V+3W)
r
Figure 14 Lineariteit van de duale ruimte
32
r
r
ω( v 2)
r
ω (2V + 3W ) = 2ω (V ) + 3ω (W )
Appendix C: vectoren in de Minkowski ruimte
In een Euclidische ruimte is de basis gedefinieerd met behulp van het Kronecker symbool
r r
ei • e j = δ ij . Dit betekent dat alle basisvectoren lengte 1 hebben en loodrecht op elkaar
staan. Het scalair product is gedefinieerd als
r r
r
r
r r
a • b = (a i ei ) • (b j e j ) = (a i b j )(ei • e j ) = g ij (a i b j ) = a i b j
De matrix g is een matrix waarin alleen de hoofddiagonaal verschillend is van 0 en bevat
dus de scalaire producten van alle paarsgewijze combinaties van basisvectoren. Twee
vectoren staan loddrecht op elkaar als de scalair product gelijk is aan 0.
In een Minkowski ruimte wordt de Kronecker delta vervangen door het symbool η.
Beiden zijn gelijk aan 0 als er twee verschillende indices in het spel zijn. Het enige
verschil is als i=j=0 dan is η=-1. Na expansie geeft dit
r r
g1 • g 1 = −1
r r
g2 • g2 = 1
r r
r r
g1 • g 2 = g 2 • g 1 = 0
Het scalair product wordt
r r
r
r
r r
a • b = (a i ei ) • (b j e j ) = ( a i b j )(ei • e j ) = η ij ( a i b j ) = −a 0 b 0 + a1b1 .
De regel blijft dat twee vectoren loodrecht op elkaar staan als het het scalair product
gelijk is aan 0. Men kan nagaan dat dit het geval is als b 0 = - a1 en b1 = - a 0. Meetkundig
betekent dit een symmetrie ten opzichte van de hoofddiagonaal. Hieruit volgt verder dat
een lichtstraal loodrecht staat op zichzelf.
Tenslotte nog enige terminologie. Een null-vector is een vector waarvan de lengte gelijk
is aan nul. Een zero-vector is een vector waarvan alle componenten gelijk zijn aan nul.
33