Relativiteitstheorie van Einstein:
Banen van Planeten en Satellieten
Banen van Planeten en Satellieten ...................................................................................1
1. Klassieke Mechanica: Planeetbanen.............................................................................2
1.1 Intro: het centrale massa probleem .........................................................................2
1.2 Snelheid en versnelling in poolcoordinaten ............................................................3
1.3 Baanvergelijking....................................................................................................4
1.4 Potentiele en kinetische Energie.............................................................................5
1.5 Kegelsneden ..........................................................................................................8
1.5.1 Ellips in Cartesische coordinaten.....................................................................8
1.5.2 Ellips in Poolcoordinaten ..............................................................................10
1.5.3 Veralgemening naar kegelsneden in poolcoordinaten ....................................10
1.6 Types banen.........................................................................................................11
1.6.1 Baan Parameters ...........................................................................................11
1.6.2 Ellips ............................................................................................................12
1.6.3 Cirkel............................................................................................................12
1.6.4 Parabool........................................................................................................13
1.6.3 Hyperbool.....................................................................................................13
1.7 Samenvatting .......................................................................................................13
2. Relativistische aanpak en geodetische vergelijking ....................................................13
2.1 Schwarzschild Lijnelement ..................................................................................13
2.2 Symmetrieën, behoudswetten...............................................................................17
2.3 Schwarzschild potentiaal......................................................................................17
2.4 Schwarzschild banen............................................................................................19
Appendix: geometrische eenheden.................................................................................22
1
Toen Apollo 8 voor het eerst naar de maan vloog was het geen sinecure om in een
correcte baan rond de maan te komen. Het gevaar was dubbel: enerzijds bestond het erin
om op de maan te pletter te slaan, anderzijds was er een risico om de maan voorbij te
vliegen en terug de ruimte in te gaan. Ze moesten ‘mikken’ op zo’n 100 km boven het
maanoppervlak (de fout was 2.5km) en zorgen dat ze de juiste snelheid hadden. Ook het
verlaten van de maanbaan was een kritisch gebeuren omdat dit aan de achterkant moest
plaatsvinden en omdat er eenzelfde probleem van nauwkeurigheid was als bij het naderen
van de maan. In dit hoofdstuk houden we ons bezig met dit soort van mechanische
problemen.
De bedoeling is om de verschillen tussen de klassieke mechanica en de relativiteitstheorie
te bespreken. Daartoe geven we eerst een klassieke analyse.
1. Klassieke Mechanica: Planeetbanen
1.1 Intro: het centrale massa probleem
Nadat Copernicus (1473-1543) overgestapt was op een heliocentrisch model van het
universum waarin de zon centraal stond formuleerde Johannes Kepler (1571-1630) drie
wetten die de beweging van de planeten beschreven
1. De planeten beschrijven elliptische banen rond de zon met de zon in een van de
brandpunten. ( De zon staat dus niet in het centrum zoals bij Copernicus)
2. De snelheid is niet constant maar varieert met de afstand tot de zon. De snelheid is
hoger naarmate de afstand tot de zon kleiner is. Meer precies: de vector
zonplaneet beschrijft in dezelfde tijdsduur gelijke oppervlaktesegmenten van de
ellips.
3. De kwadraten van de omlooptijden verhouden zich als de derde machten van de
grote assen van de elliptische banen
Newton (1642-1727) toonde aan dat deze banen konden worden berekend op basis van
zijn gravitatiewet zoals beschreven in zijn Principia in 1687.
In essentie gaat het over het probleem van een centrale massa rond dewelke een tweede
massa draait die veel kleiner is, bijvoorbeeld een planeet rond de zon of een satelliet rond
de aarde. We nemen ook aan dat de centrale massa niet roteert. Het doel is dan om de
vorm van de baan te bepalen. Deze wordt bepaald door de grootte en de richting van de
beginsnelheid. Indien de beginsnelheid dezelfde richting heeft als de verbindingslijn
tussen beide massas dan is deze lijn meteen ook de baan en slaat het object te pletter op
de massa. Als we aannemen dat deze richtingen verschillend zijn dan kunnen we de
volgende classificatie van de banen maken.
1. Suborbitaal: De beginsnelheid is te laag zodat het voorwerp terug valt op aarde.
De baan is een deel van een ellips.
2. Orbitaal. Wanneer de snelheid verhoogd wordt is er een specifieke waarde
waarvoor het object een cirkelvormige baan beschrijft. Als de snelheid nog
verhoogd wordt dan gaat deze baan over in een ellips.
2
3. Open banen. Wanneer de snelheid verhoogd wordt boven een bepaalde limiet die
we de ontsnappingssnelheid noemen dan wordt de baan een parabool of een
hyperbool.
Kenmerkend voor dit probleem is dat de kracht altijd gericht is volgens de verbindingsas
tussen beide massas. Daarom zijn poolcoordinaten het meest geschikt. Als we aannemen
dat we de oorsprong van het assenstelsel (de pool) samenvalt met de centrale massa dan
valt de kracht samen met de vector van de oorsprong naar het object.
Een eerste methode bestaat er in de wetten van Newton toe te passen op een probleem
met een centrale massa. Daartoe zoeken we eerste een expressie voor de verschillende
componenten van de versnelling in poolcoordinaten. Zoals in het vorige hoofdstuk
besproken is dit een mooie toepassing van de covariante afgeleide. Pro memorie wordt dit
hier herhaald.
1.2 Snelheid en versnelling in poolcoordinaten
r
We vertrekken van de positievector r waarvan het beginpunt samenvalt met de
oorsprong van het assenstelsel en waarvan het eindpunt een curve beschrijft in de tijd.
r
r
We maken gebruik van poolcoordinaten met als basisvectoren, er & eϕ waarvan de lengte
gelijk is aan 1, respectievelijk r. De snelheid is gedefinieerd als de tijdafgeleide van de
r
r
r
r dr
r
r
plaatsvector. Deze laatste kan geschreven worden als r = rer zodat v =
= r&er + ϕ&eϕ
dt
Vermits de versnelling gedefinieerd is als de afgeleide van de snelheidsvector passen we
de covariante afgeleide toe op de snelheid.
r
r dv dv µ s
r
dx a r
dv µ s
µ ν
a=
=
eµ + v Γ µα
eν =
eµ + v α Γ µ αν vν e µ
dt
dt
dt
dt
Equation 1
Dit moet worden ingevuld voor beide coordinaten, met ander woorden voor µ = {r,φ}
dv r
dt
dv r
dt
s dv ϕ
er +
dt
s dv ϕ
er +
dt
s
r
r
r
eϕ + vϕ Γ r ϕϕ v ϕ e r + v r Γ ϕ rϕ v ϕ e ϕ + v ϕ Γ ϕ ϕr v r e ϕ =
s
r
r
r
eϕ + vϕ ( −r )v ϕ e r + v r (1 / r )v ϕ eϕ + v ϕ (1 / r )v r e ϕ =
Equation 2
Hierin hebben we ook de correcte Christoffel symbolen ingevuld. Dit geeft dan
uiteindelijk
r
s
2
r
a = (r&& − rϕ& 2 )er + (ϕ&& + r&ϕ& )e ϕ
r
Equation 3
Dit is nog geen orthonormaal stelsel omdat de lengte van de vector eφ gelijk is aan r. Een
verdere transformatie naar een orthonormaal stelsel leidt tot
r
s
r
a = (&r& − rϕ& 2 )er + (rϕ&& + 2r&ϕ& )eϕ)
3
Hieruit volgen beide componenten.
a r = &r& − rϕ& 2
aϕ = rϕ&& + 2r&ϕ&
Equation 4
De snelheid is altijd rakend aan de baan maar de versnelling kan elke richting hebben.
1.3 Baanvergelijking
Uit het voorgaande halen we de radiale componente (in het verlengde van de
plaatsvector) en de azimuth componente loodrecht daar op. 1
De kracht is altijd gericht volgens de plaatsvector. Hieruit volgt dat aφ=0. Anderzijds
kunnen we de volgende expressie opschrijven.
d 2
r ϕ& = 2rr&ϕ& + r 2ϕ&& = raϕ = 0
dt
( )
Equation 5
Hieruit volgt dat r 2ϕ& = h waarbij h een constante is gelijk is aan het hoekmoment en
bepaald wordt door de begincondities
r r r r
h = r × v = r v sin α .
Equation 6
Dit is eveneens gelijk aan de oppervlakte van een baansector per tijdseenheid waarvoor
geldt dat
dA 1
= rrϕ& = h / 2
dt 2
Equation 7
dφ
r
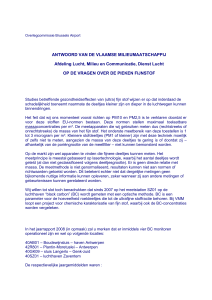
Figure 1 Kepler’s tweede wet: de vector die het centrale punt verbindt met de baan beschrijft in
gelijke tijdsintervallen gelijke oppervlaktes
1
Merk op dat dit andere componenten zijn dan de tangiele en radiale componenten van de versnelling die
niets met het assenstelsel te maken hebben maar alles met de baanvergelijking en bijhorende kromtestraal.
4
Vervolgens gaat onze aandacht naar de radiale component. a r = &r& − rϕ& 2 Vermits we de
baanvergelijking zoeken we het verband tussen φ en r. We voeren een transformatie uit
u=1/r en vervangen we de afgeleiden naar de tijd als volgt
du du dt (−1 / r 2 )r& − r&
=
=
=
dϕ dϕ dt
h
ϕ&
− r&
d ( ) dt
2
&r&
&r&
d u
d du
h
( )=
=
=−
=− 2 2
2
dϕ dϕ
dϕ dt
hϕ&
dϕ
h u
Equation 8
Bovendien kunnen we gemakkelijk de radiale versnelling berekenen.
a r = − F / m = GMu 2
Equation 9
Invullen geeft een differentiaal vergelijking van rang 2
GM d 2 u
=
+u
h2
dϕ 2
Equation 10
GM
(1 + e cos(ϕ + ψ ) ) . Terug vertaald naar het oorspronkelijke
h2
h 2 / GM
uitgangspunt wordt dit r =
. Hierin zijn e en ψ twee integratie
(1 + e cos(ϕ + ψ ) )
constanten. In de periapsis is de afstand tussen de centrale massa en het object in orbit
minimaal omdat cos(φ+ψ) =1 (de noemer zo groot mogelijk). Als we op deze plaats φ=0
kiezen dan is e steeds positief en is ψ=0. De finale vergelijking wordt
De oplossing is u =
h 2 / GM
r=
(1 + e cos(ϕ ) )
Equation 11
1.4 Potentiele en kinetische Energie
De arbeid die geleverd wordt door een kracht is het scalaire product van de kracht met de
verplaatsing. Er zijn twee soorten krachten: conservatieve en dissipatieve. Conservatieve
krachten hangen alleen af van de positie. Voor conservatieve krachten is de integraal
onafhankelijk van het gevolgde pad. Met andere woorden, de kracht is alleen afhankelijk
van de begin en eind positie en ze kan worden gekarakteriseerd met een potentiaalveld U.
De geleverde arbeid is gedefinieerd als
r
2
r
r
dW = − F • dr ⇒ W12 = ∫ − F • dr = −(U 2 − U 1 )
Equation 12
r1
Voorbeeld [veer] 1 dim
Dit is een eendimensionaal voorbeeld waarbij het potentiaalveld en de kracht getoond
worden als functie van x. Een veer die wordt uitgerokken heeft een kracht F=-kx. Hieruit
volgt U=1/2kx2. Vermits de potentiele energie alleen afhangt van de plaats kan die ook
als zodanig worden geplot. De totale enrgie wordt aangegeven doorde stippellijn. Een
5
willekeurig punt op de curve geeft de verdeling tussen potentiele en kinetische energie.
De afgeleide van de parabool toont de kracht op een minteken na. Zodoende is de kracht
zowel voor positieve als negatieve x-waarden steeds gericht naar de oorsprong.
F
x
U
Ekin
Epot
x
M
M
Figure 2 Een veer die beweegt tussen twee omkeerpunten met bijhorende potentiaalcurve en de
kracht als functie van de afstand.
Dit is een handige voorstelling van een dergelijk conservatief systeem en geeft inzicht in
de energie uitwisseling tussen potentiele en kinetische energie waarbij de totale som
constant is. Deze situatie is alleen stabiel als we een soort potentiaalput hebben waarbij
het punt met minimale energie de evenwichtstoestand voorstelt. De kracht is steeds in de
richting van de oorsprong gericht.■
We kunnen dit nu toepassen op onze situatie omdat elke centraal gerichte kracht, meer
specifiek de zwaartekracht, een conservatieve kracht is. Dit kan als volgt worden
ingezien. Een pad tussen twee punten kan worden opgesplitst in radiale en cirkelvormige
segmenten. Deze laatste dragen niet bij in de geleverde arbeid omdat kracht en
verplaatsing loodrecht op elkaar staan. De som van de arbeid geleverd in de radiale
segmenten is gelijk aan de totale radiale verplaatsing en is dus onafhankelijk van het pad.
Hoe ziet de potentiaal er uit in geval van de zwaartekracht? Dit kan worden afgeleid uit
r GMm r
de kracht die gegeven wordt door F =
r . De potentiaal is dan gelijk aan
r2
r2
1 1
dr
U 2 − U 1 = GMm ∫ 2 = −GMm −
r2 r1
r1 r
6
Als referentiepunt definieren we U = 0 op oneindig. De potentiaal als functie van de
GMm
afstand wordt dan gegeven door U = −
r
Vervolgens berekenen we de kinetische energie in poolcoordinaten. Vermits de
r
r dr
r
r
r
r
snelheidvector gegeven wordt door v =
= r&er + ϕ&eϕ = r&er + rϕ&eϕ) wordt de kinetische
dt
energie gelijk aan
r r
(m / 2)v • v = (m / 2)(r& 2 + (rϕ& ) 2 ) = (m / 2)(r& 2 + (h / r ) 2 )
Equation 13
De totale energie per eenheid massa wordt gegeven door
r r r& 2
h2
r& 2
h 2 GM
E = (1 / 2)v • v =
+ 2 +U =
+ 2 −
= r& 2 / 2 + V
2 2r
2 2r
r
Equation 14
Dit kan ook worden gelezen als behoud van energie. De eerste term heeft te maken met
de snelheid in de radiele richting en het behoud van de lineaire kinetische energie. De
tweede term is gerelateerd aan de snelheid in de richting loodrecht daarop.
rϕ&
r&
O
Figure 3 Ontbinding van de snelheid in een radiele component en een component loodrecht daarop.
Het hoekmoment ten opzicht van het punt O is gedefinieerd als r 2ϕ& en is een constante
van de beweging. Daaraan gekoppeld is er het behoud van de rotatie kinetische energie.
De derde term stelt de potentiele energie voor. De tweede en de derde term worden vaak
samen genomen in een term genaamd V die de effectieve potentiaal per eenheid massa
wordt genoemd.
7
Deze laatste is geplot in de volgende figuur voor verschillende waarden van h, namelijk
h=0, 5 en 10. Maar eerste converteren we naar zogenaamde geometrische eenheden.
In appendix wordt hierover meer informatie gegeven. In de volgende vergelijking worden
de geometrische eenheden aangegeven met een ‘. Dit is een notatie die we alleen hier
gebruiken en verder niet. De omrekening volgens de tabel in het Appendix is als volgt
h' = h / c & M ' = MG / c 2 . Als we dit invullen in Equation 14 vinden we
Veff =
Veff
h 2 GM
h' 2 c 2 GM ' c 2
h' 2 M '
−
⇒
=
−
⇒
=
−
V
eff
r
rG
r
2r 2
2r 2
c2
2r 2
Equation 15
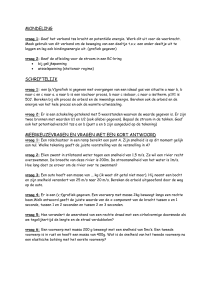
De vergelijking voor de effectieve potentiaal Veff/c2 wordt nu geplot in onderstaande
figuur. Voor grote r waarden is de invloed van h klein en is het 1/r verband dominant.
Voor kleinere waarden van r heeft h een grote invloed op de vorm van de curve. Voor
grote waarden van h is het 1/r2 verband het belangrijkste: deze stelt een kracht voor in de
positieve richting van de r as en die een barriere vormt waardoor het deeltje
weggehouden wordt van de oorsprong. Voor tussenliggende waarden (bijv h=5 , reeks 1
met blauwe kleur) is er een balans tussen beide componenten en is er dus ook een
minimum voor r=h2
Newton potentiaal
0,030
0,020
Veff/c^2
0,010
0,000
-0,010
Series1
0
20
40
60
80
100
Series2
Series3
-0,020
-0,030
-0,040
-0,050
r
Figure 4 Newton potentiaal (Veff) als functie van r voor h=0 (series 3), 5(series 1) en 10 (series 2)
1.5 Kegelsneden
1.5.1 Ellips in Cartesische coordinaten
De vraag is nu hoe de baanvergelijking, zoals hierboven afgeleid, er uit ziet, welke vorm
deze curve heeft. Er zal blijken dat verschillende curven mogelijk zijn op voorwaarde dat
ze behoren tot de klasse van de kegelsneden. Alhoewel er dus andere vormen mogelijk
zijn dan een ellips zullen we toch hiermede beginnen.
8
Een ellips kan op twee manieren gedefinieerd worden:
1. Als een verzameling punten waarvoor de som van de afstanden tot twee vaste
punten (brandpunten) constant is.
2. Als een verzameling punten waarvoor de verhouding van de afstanden tot een vast
punt (brandpunt) en tot een vaste rechte (richtlijn) constant is. Deze verhouding
wordt excentriciteit e genoemd.
B(0,b)
Q2(-d,y)
A2(-a,0)
0(0,0)
F2(-c,0)
P(x,y)
F1(c,0)
Q1(d,y)
A1(a,0)
D(d,0)
Figure 5 Ellips in een Cartesisch stelsel met de oorsprong in het middelpunt en beide brandpunten
met bijhorende richtlijn
We gaan uit van een vergelijking van een ellips in een rechthoekig assenstelsel. We
noemen OA1=a de halve lange as, OB=b de halve korte as. De afstanden OF1=OF2=c
geven de posities van het brandpunten op de lange as. De afstand van de oorsprong tot de
richtlijn noemen we d. Als we verder uitgaan van de tweede definitie dan noteren we
e=
PF1 PF 2
=
PQ1 PQ 2
Equation 16
Hieruit volgt dan de eerste definitie. Er geldt dat PF1+PF2=e(PQ1+PQ2)=2ed en dus
constant is. Als we P laten samenvallen met punt A1 en als we rekening houden met
symmetrie overwegingen dan zien we dat deze constante gelijk is aan 2a. Hieruit volgt
ook dat
e=
PF1 a − c
=
PQ1 d − a
Equation 17
Als we vervolgens P laten samenvallen met het punt B dan moet de afstand BF1=BF2=a.
Er geldt dus dat a 2 = b 2 + c 2 . Hieruit volgt ook dat
e=
PF1 a
=
PQ1 d
Equation 18
Door beide uitdrukkingen voor e gelijk aan elkaar te stellen vinden we a2=cd wat
betekent dat a middelevenredig is tussen c en d. Hieruit volgt
c a
c−a
d −a
F1A1
D1A1
e = = en verder
=−
⇒
=−
a d
c+a
d+a
F 1A 2
D1A2
9
Dit laatste betekent dat (A1,A2,F1,D) een harmonisch puntenviertal vormen. Met andere
woorden, het lijnstuk (A1,A2) wordt door de punten F1 en D in dezelfde verhouding
verdeeld.
De poollijn van een punt P dat niet op de ellips ligt, is de meetkundige plaats van de
punten die harmonisch toegevoegd zijn aan P ten opzichte van de snijpunten van de ellips
met elke rechte door P
Dus de poollijn van F1 bevat het punt D. Uit symmetrie overwegingen beskuiten we dat
de rechte DQ1 de poollijn is van F1. Omdat F1 een brandpunt is noemen we de rechte
DQ1 een richtlijn.
Hieruit volgt ook dat een verzameling ellipsen met dezelfde excentriciteit dezelfde
‘vorm’ behouden. Stel immers dat we een ellips construeren met (a’,b’)=(λa, λb) en e’=e
dan geldt immers dat c’=a’e’=λae=λc en d’=a’/e’=λa/e=λd. Alle afmetingen schalen dus
met dezelfde factor, inclusief de afstand tot de brandpunten en tot de richtlijn.
1.5.2 Ellips in Poolcoordinaten
We zoeken nu de vergelijking van de ellips in poolcoordinaten. We nemen aan dat één
van de brandpunten gekozen wordt als de pool. De richtlijn is gegeven door r cos(ϕ ) = p '
waarin p’ de afstand is tussen de oorsprong en de voet van de richtlijn. De vergelijking
van de ellips is e = OP / PQ = r /( p'−r cos(ϕ )) wat kan omgeschreven worden tot
r = p /(1 + e cos(ϕ )) . De afstand van de oorsprong tot een punt op de ellips varieert van
minimaal in de periapsis tot maximaal in de apoapsis; de periapsis wordt aangeduid met
een subscipt π rπ =p/(1+e) als φ=0 en de apoapsis met het subscript a, ra=p/(1-e) als
φ=180°. Vermits rπ+ ra =2a volgt hier ook uit dat
a=p/(1-e2)
rπ =a(1-e)
ra=a(1+e).
De vergelijking wordt
r=
a(1 − e 2 )
1 + e cos(ϕ )
Equation 19
1.5.3 Veralgemening naar kegelsneden in poolcoordinaten
Een hyperbool kan op twee manieren gedefinieerd worden, net zoals een ellips:
1. Als een verzameling punten waarvoor het verschil van de afstanden tot twee vaste
punten (brandpunten) constant is.
2. Als een verzameling punten waarvoor de verhouding van de afstanden tot een vast
punt (brandpunt) en tot een vaste rechte (richtlijn) constant is. Deze verhouding
wordt excentriciteit e genoemd.
Hetzelfde geldt voor een parabool. Deze heeft maar een brandpunt en de afstand van elk
punt van de parabool tot dit brandpunt is gelijk aan de afstand tot de richtlijn. De
excentriciteit is dus gelijk aan 1.
10
Deze definities maken een veralgemening mogelijk waarbij de drie figuren op dezelfde
manier geconstrueerd worden en waarbij de verschillen in rekening worden gebracht via
de parameter van de excentriciteit. Deze laatste bepaalt het type (ellips, parabool en
hyperbool) Het semi-latus rectum bepaalt de grootte.
Semi-latus
rectum
P1
P2
P3
F
D
Figure 6 Kegelsneden met hetzelfde bandpunt en richtlijn maar verschillende waarden voor de
eccentriciteit
1.6 Types banen
1.6.1 Baan Parameters
De fysische parameters zijn E en h waarbij h verder kan gespecificeerd worden door r en
v . De geometrische parameters zijn het type, de excentriciteit e en de grote as a. Met
behulp van Eq 13 berekenen we E. Vermits de grootte en de richtting van de snelheid
voortdurend veranderen kiezen we een gemakkelijk punt, namelijk de periapsis. Daar
staan snelheid en plaatsvector loodrecht op elkaar.
h 2 / GM
h 2 r (1 + e) (1 + e)
Uit Eq 11 volgt rπ =
en vπ2 = 2 = π
. Invullen geeft
=
(1 + e)
GMrπ
rπ
GMrπ2
E = vπ2 =
(GM ) 2 2
(e − 1) . Dit geeft de volgende opties
2h 2
11
e
e=0
0<e<1
e=1
e>1
E
E<0
E<0
E=0
E>0
type
cirkel
ellips
Parabool
hyperbool
Tabel 1
E
hyperbool
parabool
r_min
r
r_max
ellips
cirkel
Figure 7 De som van de kinetische en potentiele energie is constant en bepalend voor het type baan.
De effectieve potentiaal heeft de vorm zoals getoond in de figuur. Het is een
potentiaalput met voor grote waarden van r een 1/r verband en een waarde die 0 benadert.
Een cirkelvormige baan wordt voorgesteld door een punt waar de curve minimaal is.
Eeen ellips is een beweging die gebonden is tussen een maximale en een minimale
afstand. De parabool valt samen met E=0 en voor de hyperbool is E positief.
1.6.2 Ellips
Uit de vergelijking van eq 11 en 17 volgt dat h 2 = aGM (1 − e 2 ) wat dan weer impact
heeft op E, namelijk E =
v 2 GM
GM
−
=−
. Er is een directe relatie tussen E en a.
2
r
2a
1.6.3 Cirkel
v 2 GM
=
en
2
2a
v 2 = GM / a . Als we een centraal lichaam hebben met een straal R en een satelliet
De cirkel is een ellips met e=0 en met a=r. Uit bovenstaande volgt E =
12
lanceren op een hoogte d dan is a=R+d en dan bestaat er op elke hoogte een
GM
die de baan cirkelvormige maakt.
snelheid v =
R+d
1.6.4 Parabool
v 2 GM
−
= 0 ⇒ v 2 = 2GM / r
2
r
E=0 betekent dat met grotere r de snelheid afneemt zodanig dat op oneindig de snelheid
gereduceert is tot 0 en alle kinetische energie is omgezet in potentiele.
Als e=1 leert Eq 11 dat voor r →∝ _ if _ ϕ → π . E =
1.6.3 Hyperbool
Dit is geen gesloten baan maar ze wordt gegenereerd voor objecten die even in de buurt
van de aarde komen en daarna terug de ruimte ingaan.
1.7 Samenvatting
Het probleem van de bepaling van de baan is aangepakt als een centrale kracht probleem
beschreven in poolcoordinaten. De pool ligt in een van de brandpunten. De
zwaartekracht, de lineaire snelheid en de hoeksnelheid hangen af van r en zijn dus
variabel. Het hoekmoment is een constante. Er is geen precessie.
2. Relativistische aanpak en geodetische vergelijking
De banen die testdeeltjes volgen worden in de algemene relativiteits theorie bepaald door
de geodeten als alleen de zwaartekracht een rol speelt en dus geen andere krachten
aanwezig zijn. Dit is het geval bij de banen van planeten en satellieten. Deze geodeten
worden bepaald door de kromming van de ruimte. Dit hoofdstuk is dus ook een mooie
illustratie voor wat kromming in de praktijk betekent en hoe we daar mee omgaan.
De kromming van de ruimte wordt gekarakteriseerd is door het lijnelement.
We bespreken dus eerst het lijnelement onder dezelfde aanname als hierboven, namelijk
één centrale massa. Vervolgens onderzoeken we de banen van planeten en satellieten en
bekijken de verschillen met de aanpak van Newton.
2.1 Schwarzschild Lijnelement
Als we te maken hebben met één enkele geïsoleerde massa, waarbij ander krachten dan
de zwaartekracht afwezig zijn, dan noemen we die kracht centraal en nemen aan dat de
ruimte rondom sferisch symmetrisch is. De eigenschappen zijn dus in alle richtingen
dezelfde. Strikt genomen nemen we ook aan dat deze massa niet roteert maar deze
effekten zijn vaak klein genoeg om in deze context geen rol van betekenis te spelen. De
ruimte-tijd buiten de massa wordt in dit geval beschreven door het Schwarzschild
lijnelemenent dat niet alleen toepasbaar is voor satellietbanen om de aarde en planeten
banen om de zon maar ook op zwarte gaten, rode dwergen en neutronensterren.
13
Het lijnelement van een Schwarzschild geometrie is een oplossing van de Einstein
vergelijkingen in vacuum (Gµν= Rµν=0) gegeven door
ds 2 = −(1 −
2GM 2 2
)c dt +
c2r
dr 2
+ r 2 (dθ 2 + sin 2 θdϕ 2 )
2GM
(1 − 2 )
c r
Equation 20
Omwille van de symmetrie is gekozen voor sferische coordinaten. De eerste twee termen
ondergaan een modificatie ten opzichte van een vlakke ruimte, de laatste twee niet. In
geometrische eenheden wordt dit
ds 2 = −(1 −
2M
)dt 2 +
r
dr 2
+ r 2 (dθ 2 + sin 2 θdϕ 2 )
2M
(1 −
)
r
Equation 21
Deze uitdrukking bevat alle nodige informatie en is dus compleet. We beschouwen deze
uitdrukking in dit hoofdstuk als gegeven. We leiden ze niet af maar maken ze wel
plausibel. Ze heeft de volgende eigenschappen
1. Tijdsonafhankelijk
2. Sferische symmetrie De krommingsfactor (1-2M/r) hangt alleen af van r en niet
van φ en komt alleen voor in de dt2 en dr2 term.
3. Schwarzschild straal r=2M geeft de grens aan waarbij alles naar het centrum
beweegt en niets nog kan ontsnappen aan de zwaartekracht van de centrale massa.
Andere benamingen zijn de event horizon of de Schwarzschild horizon.
Massa
Zon
Aarde
Witte dwerg met
massa van de zon
Neutronenster met
massa van de zon
2 1030 kg
5.9 1024 kg
Geometrische
massa (Straal)
696000 km
6371 km
Schwarzschild
straal
1477 km
4,4 mm
5000 km
10 km
Tabel 2
Voor grote waarden van r ben adert de krommingsfactor (1-2M/r) de waarde 1 waardoor
de metriek gelijk wordt aan
dτ2= dt2- dr2- r2dφ2
dat een voorstelling is van een vlakke ruimte zonder kromming. Met andere woorden, een
waarnemer op grote afstand van de massa neemt een vlakke ruimte waar. Er is dus een
zachte overgang van vlak naar gekromd. Hetzelfde geldt als de massa naar nul gaat.
We willen nu eerst een fysische interpretatie van de coordinaten en van de metriek. Net
zoals we een vlakke ruimte opspannen met linalen en klokken kunnen we nu de
geometrie opgespannen met behulp van concentrische bollen die geidentificeerd worden
met behulp van r. We kunnen dan afstanden en tijd meten en daaruit de beide hoeken φ
en θ afleiden. Maar op globaal niveau moeten we rekening houden met de kromming. Dit
kunnen we doen via het lijnelement. Bijvoorbeeld, voor de variabele r kunnen we de
14
dr 2
door in de metriek t, θ en φ constant te stellen
2M
1−
r
of dt=dθ=dφ=0 te stellen. De afstand ds noemen we de eigenlijke afstand en dr de
coordinaatafstand. Op dezelfde manier geldt voor de tijd
2M
)dt 2 . De metriek is dus een voorschrift hoe afstanden en tijd moeten
dτ 2 = −(1 −
r
behandeld worden.
afstand dr omrekenen naar ds 2 =
Vervolgens willen we de kromming visualiseren, of tenminste deelaspekten van de
kromming, zoals de ruimtelijke kromming. Daartoe beschouwen we een constante tijd
(t=cte, dt=0) en een equatoriale snede (Θ=π/2). Dan houden we r en φ over.
ds 2 =
dr 2
+ r 2 dϕ 2
2M
1−
r
Equation 22
Dit heeft een rotatie symmetrische as omdat φ niet voorkomt in de coefficienten en de
vervanging van φ door ‘φ + const’ geen invloed heeft. Dit kan dus gevisualiseerd worden.
Dit gaat als volgt. We construeren een ander oppervlak met behulp van cylindrische
coordinaten (ρ, ψ, z) zodat ds2=d_cyl2 , met andere woorden zodat de geometrie dezelfde
is. Voor cylindrische coordinaten geldt dat de metriek gekend is en gelijk is aan
d _ cyl 2 = dρ 2 + ρ 2 dψ 2 + dz 2 . Merk op dat dit een vlakke en geen gekromde ruimte is.
We moeten nu de verbanden leggen tussen beide coordinaat sets. We hebben de volgende
functies nodig: z(r,φ), ρ(r, φ) en ψ(r,φ). Omwille van de rotatie symmetrie vallen deze
functies uiteen in twee groepen die elk maar van één variabele afhangen, namelijk
z(r), ρ(r) en ψ(φ)=φ. Het laatste is het gevolg van de rotatie symmetrie. Invullen in de
metriek van de cylinder geeft
2
2
dρ 2 dz 2
dρ
dz
d _ cyl 2 =
dr + ρ 2 dψ 2 + dr = + dr 2 + ρ 2 dψ 2
dr
dr
dr dr
Equation 23
Vergelijking tussen de twee laatste expressies leert dat ψ(φ)=φ en ρ=r en dat
2 dz 2 2
dr 2
Hieruit volgt
(1) + dr =
2M
dr
1−
r
z = 4M
r
−1
2M
Equation 24
Een en ander is aanschouwelijk gemaakt in de onderstaande Figuur waarin cirkels
getoond zijn die de doorsnede voorstellen van de bollen met vlakken die door het
centrum gaan en waarbij het resultaat ‘embedded’ is in een 3D vlakke Euclidische ruimte.
Het tweede deel van dezelfde figuur toont een bovenaanzicht waarop verschillende
15
cirkels getoond zijn. Als deze allemaal in een vlakke ruimte zouden liggen dan zou dr=dz
maar omdat de ruimte gekromd is geldt dr<dz.
dr
r
horizon
dz
Figure 8 Embedding van een 2D subruimte in een 3D Euclidische ruimte die het verschil illustreert
tussen de coordinaat afstand dr en de eigenafstand.
De functie z(r) is helemaal onderaan getoond. Het is een halve parabool of een halve
paraboloide als we φ mee beschouwen. Hieruit blijkt dat de krommingsfactor steeds
16
groter is dan 1, voor grote r asymptotisch naar één gaat en voor kleine r daarentegen zeer
groot kan worden. Hieruit blijkt ook dat r niet de straal is vanuit het centrum maar wel
een identificatie van de cirkels. Het is weliswaar mogelijk de cirkelomtrek te meten en
vervolgens te delen door 2π om r te berekenen . Maar als we dit doen voor twee naburige
cirkels dan wordt het verschil tussen beide gegeven door dz en niet door dr.
2.2 Symmetrieën, behoudswetten
De geodetische vergelijking is niet één differentiaal vergelijking maar het zijn er 4.
Symmetrieen zijn erg belangrijk omdat ze de complexiteit significant kunnen verlagen.
Ze worden gemakkelijk opgespoord als het lijnelement niet afhankelijk is van een
variabele. Als bijvoorbeeld bij coordinaat x1 een constante delta kunnen optellen zonder
dat het lijnelement verandert dan komt dit er op neer dat de vector
ξ=(x0,x1,x2,x3)=(0,1,0,0) een zogenaamde Killing vector is. De metriek gab(x) is dan ook
r r
onafhankelijk van x1 en dan volgt hier uit dat ξ • u = cons .
In het Schwarzschild lijnelement zijn er geen coefficienten die afhangen van t en φ en dit
leidt tot de volgende invariante grootheden
r r
r r
2M dt
dϕ
ε = −ξ • u = (1 −
)
en
h = η • u = r 2 sin 2 θ
Equation 25
r dτ
dτ
Vermits
dt
lim(ε )= dτ
=
r →∞
E
m
stelt dit het behoud van energie, resp het behoud van
hoekmoment voor.
Er is nog een derde constraint die te maken heeft met de normalisatie van de snelheid
r
u • u = g µν u u uν = −1
Equation 26
2.3 Schwarzschild potentiaal
Vermits het hoekmoment constant is ligt de baan in een vlak. We kiezen daarvoor het
evenaarsvlak met θ=π/2 zodat uθ=dθ/dτ=0. Als we dit invullen in Eq. 26 dan bekomen we
2M dt 1
− (1 −
) +
r dτ 2 M
1−
r
2
2
dr 2
dϕ
+ r 2 sin 2 θ
= −1
dτ
dτ
Equation 27
We elimineren dt/dτ en dφ/dτ met behulp van Eq 25 en vinden
2
2M h 2
ε 2 − 1 1 dr 1
= + (1 −
)( 2 + 1) − 1
2
2 dτ 2
r r
Equation 28
Als we het linkerlid gelijk stellen aan E dan kan dit herschreven worden als
2
1 dr
E = + Veff (r )
2 dτ
17
Equation 29
Veff (r ) =
1
2M h 2
M
h 2 Mh 2
(
1
−
)(
+
1
)
−
1
=
−
+
− 3
2
r r2
r 2r 2
r
Equation 30
De eerste twee termen van Veff zijn dezelfde als bij een klassieke benadering (Eq. 15), de
derde term is nieuw. De impact is getoond in onderstaande figuur. Voor dezelfde waarde
h=4.6 is de klassieke oplossing vergeleken met de relativistische. Voor kleine waarden
van r is er een groot verschil. Waar de klassieke oplossing een testdeeltje wegduwt van
de centrale massa (repulsieve kracht) is er in de relativistische oplosssing een
aantrekkingskracht.
0,600
0,500
0,400
0,300
Series4
Series5
0,200
0,100
0,000
0
5
10
15
20
25
-0,100
Figure 9 De vergelijking tussen Veff in de klassieke benadering (series 5) en in de relativistische
benadering (series 4), respectievelijk een oneindige barriere en een potentiaalberg van beperkte
hoogte.
Dat dit gedrag sterk afhangt van h blijkt uit onderstaande figuur waar de relativistische
oplossing geplot is voor 3 waarden van h, namelijk 3.3, 4.0 en 4.6. Een locaal maximum
en minimum voor Veff kan worden gevonden door af te leiden naar r, tenminste indien
deze extreme waarden bestaan.
rmin =
max
2
h2
M
1 ± 1 − 12
2M
h
Equation 31
Als de expressie onder het wortelteken negatief is is er geen maximum of minimum. Dit
is het geval voor h / M < 12 = 3.46 . Als deze waarde gelijk is aan 4 dan is de
functiewaarde van dit maximum gelijk aan 0; voor grotere waarden is de functie positief,
voor kleinere waarden negatief.
18
0,100
0,050
0,000
0
5
10
15
20
Series1
25
Series2
Series3
-0,050
-0,100
-0,150
Figure 10 Relativistische potentiaal (Veff) als functie van r voor h=3.2 (series 1), 4(series 2) and 4.6
(series 3)
2.4 Schwarzschild banen
In onderstaande figuren zijn vier situaties getoond met de overeenkomstige banen. Dit is
gebaseerd op de waaren voor de totale energie en de potentiele energie net zoals in een
klassieke benadering. Een eerste mogelijkheid is getoond in onderstaande figuur met
twee cirkelvormige banen die overeenkomen met het maximum en minimum. Alleen de
baan die overeenkomt met dit minimum is stabiel.
Veff
0
r
1
r
2
r
r
1
r
2
Figure 11 Twee mogelijke circulaire banen waarvan één stabile.
Een tweede scenario is getoond waarin de Energie E negatief is wat leidt tot
ellipsvormige banen met e<1 en waarbij deze banen gebonden zijn tot een bepaalde band
gegeven door de maximum en minimum waarde van de grote as vande ellips.
19
Veff
r_a
0
r_b
r
r_a
r_b
Figure 12 Gebonden ellipsvormige banen met precessie van de periapsis.
Eeb speciale situatie treedt op in de volgende figuur. Hierbij is de energie positief maar
kleiner dan het maximum van de potentiaalheuvel. Dit is een zogenaamde ‘gescatterde
baan’ waarbij de testdeeltjes die vanaf oneindig toekomen teruggestuurd worden na een
omwenteling rond de centrale massa.
Veff
r
0
r1
r2
Figure 13 Slingshot rond de centrale massa.
Als de energie nog toeneemt en groter wordt dan het maximum van de potentiaalberg dan
wordt het voorwerp in orbit gevangen door de centrale massa.
Veff
0
r
Figure 14 Deeltje gevangen door de centrale massa.
20
r1
r2
2.5 Precession
In geval van ellipsvormige banen zoals in Figuur 12 blijkt dat de relativiteitstheorie in
staat is het experimenteel feit van de precessie van het perihelium van Mercurius
nauwkeurig te voorspellen. Dit wordt nog steeds geziien als één van de belangrijke
experimenten ter ondersteuning van de relativiteitstheorie.
Volgens de klassieke theorie van Newton zijn de planeetbanen, en dus ook die van
Mercurius, gesloten banen. Daarmee wordt het volgende bedoeld. Het perihelium is dat
punt van de baan waar de afstand tot de zon minimaal is. We kunnen nu deze punten van
minimale afstand plotten voor opeenvolgende omwentelingen en dan blijkt dat deze
punten allemaal samen vallen in geval van een gesloten baan. Dit betekent dus ook na een
hoek van 2 π.
In geval van de relativiteitstheorie treedt er een verschuiving op. Om dit in te zien moeten
dϕ dϕ / dτ
we het verband tussen r en φ berekenen
=
. We doen dat met behulp van twee
dr
dr / dτ
tijdsafgeleiden. We hebben dus eerst deze beide afgeleiden nodig. Tijdsafhankelijkheid is
typisch iets wat hoort bij het behoud van bepaalde grootheden. Inderdaad, uit Eq. 29
dr
dϕ
= ± 2( E − Veff (r )) en ook h = r 2 sin 2 θ
. Hieruit volgt
volgt
dτ
dτ
dϕ
h
1
=± 2
dr
r
2M
h2
)(1 + )
ε 2 − (1 −
r
r2
r+
dr
2
r− r
1
∆ϕ = 2h ∫
ε 2 − (1 −
2M
h2
)(1 + )
r
r2
De precessiehoek wordt nu gelijk aan ∆ϕ − 2π ≅ 6π (
21
M' 2
GM 2
) = 6π (
)
h'
ch
Appendix: geometrische eenheden
Een systeem met geometrische eenheden is een systeem waarin de fysische eenheden
licht snelheid en gravitatie constante een belangrijke rol spelen. Voor snelheid kiezen we
de lichtsnelheid in vacuum c gelijk aan 1. Alle snelheden worden dus uitgedrukt als
fracties van c. Als er vergelijkingen zijn waarin de snelheid v voorkomt worden die dus
omgeschreven naar v’=v/c. Daardoor is snelheid ook dimensieloos geworden. Hieruit
volgt voor de versnelling
v' v 1
m s s 1
= ac − 2
=
a' = =
en dim ensie = 2
t ' c ct
s mm m
Iets vergelijkbaars doen we met de massa die we in meter willen uitdrukken. Uit de
gravitatiewet van Newton vinden we de constante G=6.6*10-11 m3/(kg sec2). Als we dit
delen door het kwadraat van de lichtsnelheid vinden we G/c2=7.4 m/kg. De
oorspronkelijke massa gemeten in kg kan nu worden geconverteerd of geschaald naar de
nieuwe massa M’ in meter als
G
m3 s s
M '= M 2
en dim ensie = kg 2
=m
c
s kg m m
Hieruit volgt bijvoorbeeld voor de kracht
4
G 1
G
m3 s
m
F ' = m' a' = 2 m 2 a = 4 F & = 2 kg 2 = 1
c
c
c
s kg m
s
We kunnen dus voor elke grootheid een lijst maken die aangeeft met welke factor we de
klassieke SI eenheden moeten vermenigvuldigen om de nieuwe eenheden te bekomen.
Bijgaande tabel vat de resultaten samen
Grootheid
Lengte
Tijd
Snelheid
Versnelling
Hoeksnelheid
Massa
Kracht
Impuls = mv
Hoekmoment = rmv
Hoekmoment/massa = h=rv
energie
Power
SI eenheid
m
s
m s-1
m s-2
s-1
kg
kg m s-2
kg m s-1
kg m2 s-1
m2 s-1
kg m2 s-2
kg m2 s-3
Factor
1
c
c-1
c-2
c-1
G c-2
G c-4
G c-3
G c-3
c-1
G c-4
G c-5
22
Geo eenheid
m
m
1
m-1
m-1
M
1
m
m2
m
m
1