WHITE PAPER DOOR:
BAS VAN DER BIJL, FUNCTIE
NIELS HENKENS, FUNCTIE
MODELLED CAR DATA:
DE NIEUWE DATABRON
SAMENVATTING
Verkeersinformatie wordt steeds belangrijker, zowel voor evaluatiestudies als
voor realtime verkeersmanagement. Er zijn meerdere databronnen, variërend
van meetlussen tot Floating Car Data, die ieder hun eigen voor- en nadelen
hebben. Modelled Car Data (MCD) is een nieuwe databron voor verkeersinformatie.
Een realtime verkeersmodel fuseert reeds beschikbare data zodat individuele
voertuigen door een netwerk gevolgd kunnen worden. Hierdoor is er minder fysieke
verkeersmonitoring nodig, terwijl er meer verkeersinformatie beschikbaar komt.
Voorbeelden van deze informatie zijn reistijden, intensiteiten, wachtrijlengtes en
HB-matrices. In samenwerking met de provincie Noord-Holland is in januari 2016
een pilot op de N201 nabij Hoofddorp uitgevoerd. Uit deze pilot bleek dat MCD
gedurende langere tijd betrouwbare reistijden levert en een alternatief kan zijn voor
kentekencamera’s.
2
Modelled Car Data: de nieuwe databron
INLEIDING
Informatie over het verkeer wordt steeds belangrijker. Evaluatiestudies worden al lange tijd uitgevoerd en geven op basis
van verkeersdata inzicht in bijvoorbeeld het effect van genomen maatregelen of de prestatie van het wegennet. Zowel de
beschikbaarheid als de behoefte aan data neemt hier de laatste jaren snel toe. Een nieuwe ontwikkeling van de afgelopen
jaren zijn realtime toepassingen: steeds meer regio’s hebben een netwerkmanagementsysteem (NMS) dat op basis van
actuele verkeersinformatie geautomatiseerd verkeersmanagementmaatregelen neemt om de doorstroming te verbeteren.
Ook andere verkeerssystemen, zoals intelligente VRI’s, worden steeds meer afhankelijk van realtime verkeersinformatie.
Er zijn verschillende databronnen voor (realtime) verkeersinformatie. Bekende voorbeelden zijn meetlussen in het wegdek,
(kenteken)camera’s en floating car data (FCD). De verschillende databronnen onderscheiden zich op een aantal aspecten:
type verkeersdata, type netwerk, kwaliteit, gedetailleerdheid en kosten. Dit betekent dat voor elke toepassing opnieuw
een afweging voor de meest geschikte databron gemaakt kan worden. In deze white paper willen we een nieuwe databron
introduceren die gebaseerd is op datafusie: Modelled Car Data (MCD).
Modelled Car Data: de nieuwe databron
3
BESTAANDE DATABRONNEN
Het huidige spectrum van verkeersmonitoring beslaat een groot aantal verschillende meettechnieken. Al deze technieken
hebben eigen voor- en nadelen op het gebied van te meten indicatoren, nauwkeurigheid en kosten. Voor realtime
monitoring zijn doorgaans vooral technieken voor permanente monitoring geschikt, dit in tegenstelling tot bijvoorbeeld
telslangen of visuele telling voor kortdurende metingen.
In Tabel 1 staat een overzicht van veelgebruikte meetmethoden/databronnen voor permanente verkeersmonitoring. Daarbij
is aangegeven welke indicatoren er gemeten kunnen worden en is er tevens een inschatting gegeven van de kwaliteit
(nauwkeurigheid en betrouwbaarheid) van de meting. Dit betreft een inschatting, aangezien de werkelijke kwaliteit van
een meting sterk afhangt van onder meer de gebruikte apparatuur, de locatie en de configuratie. De kosten kunnen sterk
verschillen tussen de diverse methoden, maar kunnen ook sterk leverancier- en locatieafhankelijk zijn.
Tabel 1: Overzicht van methoden voor permanente verkeersmonitoring
METHODE
INTENSITEIT
SNELHEID
REISTIJD
VOERTUIGCATEGORIE
Meetlussen
x
x
(x)
x
VRI’s
x
Camera’s
(locatie)
Kentekencamera’s
Radar/laser
(locatie)
x
x
x
x
Traffic Studs/
Tubes
FCD
x
(x)
(x)
BT/WiFiregistratie
HBMATRIX
KWALITEIT BIJZONDERHEDEN
+
-
x
x
x
(x)
(x) = bij dicht meetnet (snelweg)
Onder andere afhankelijk van ligging
detectie
+
x
x
x
x
x
x
x
++
Meerdere camera’s
noodzakelijk
0/++
Grote verschillen in
uitvoering, mogelijkheden en kwaliteit
?
(x) = Afhankelijk van
type
Steekproef Mogelijkheden
afhankelijk van
aanbieder
Steekproef Meerdere registratiepunten noodzakelijk
De meetmethoden zijn grotendeels in te delen in puntmetingen (e.g. meetlussen, radarmetingen) waarmee bijvoorbeeld
intensiteit en snelheid op een locatie gemeten kunnen en trajectmetingen (e.g. kentekencamera’s en BT/WiFi-registratie)
waarmee reistijden over trajecten gemeten kunnen worden.
Intensiteit, snelheid en reistijd zijn voor realtime monitoren en sturen van verkeer de meest gebruikte indicatoren.
Daarnaast kunnen nog diverse andere indicatoren bemeten worden, zoals bijvoorbeeld wachttijd, wachtrijlengte, etc. Dit
vergt deels weer aanvullende meetsystemen.
4
Modelled Car Data: de nieuwe databron
MODELLED CAR DATA (MCD)
In 2016 is er een nieuwe datafusie-techniek ontwikkeld. Met behulp van realtime verkeersmodellen wordt beschikbare
verkeersdata gecombineerd, zodat individuele voertuigen door het netwerk gevolgd kunnen worden. Doordat continu de
actuele positie van individuele voertuigen berekend wordt met het verkeersmodel ontstaat er veel inzicht in het verkeer.
Een aansprekend voorbeeld is een netwerk van VRI’s. Op basis van de logbestanden van deze VRI’s kunnen onder andere
de trajectreistijden, intensiteiten en wachtrijlengtes berekend worden. Deze nieuwe databron noemen we Modelled Car
Data (MCD).
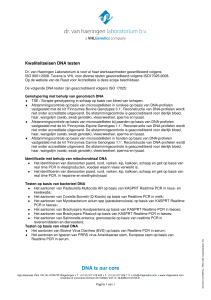
Figuur 1: fictief netwerk met drie VRI’s.
In bovenstaand figuur is een fictief netwerk van drie opeenvolgende VRI’s weergegeven. Van deze VRI’s worden continu de
lichtbeelden en detectiemeldingen vastgelegd. Als er bijvoorbeeld een voertuig van links naar rechts door dit netwerk rijdt,
worden er achtereenvolgens 9 detectiemeldingen vastgelegd (3 per kruispunt). Deze informatie, in combinatie met de
lichtbeelden, is al voldoende om de bewegingen van dit voertuig te reconstrueren. Dit gebeurd door de meldingen van de
verschillende detectielussen te matchen.
Wanneer een enkel voertuig door dit netwerk rijdt is het eenvoudig de detectiemeldingen te matchen: ze behoren immers
allemaal toe aan hetzelfde voertuig. Bij meerdere voertuigen neemt de complexiteit al snel toe, welke detectiemelding
behoort tot welk voertuig? Om dit vraagstuk te beantwoorden hebben we een realtime microscopisch verkeersmodel
ontwikkeld. Hiervoor hebben we gebruik gemaakt van het opensource state-of-the-art verkeersmodel OpenTrafficSim
(OTS), ontwikkeld door de TU Delft.
Steeds meer VRI’s in Nederland zijn online ontsloten, bijvoorbeeld via Streaming VLOG. Van deze VRI’s worden realtime de
lichtbeelden en detectiemeldingen verzonden naar een centrale server waarop het realtime verkeersmodel draait. Het
verkeersmodel reageert direct op de ontvangen informatie van de VRI’s. Dit gebeurt volgens de volgende principes:
• De lichtbeelden in het model komen overeen met de lichtbeelden van de VRI’s op straat. Als een signaalgroep op
straat van status veranderd, bijvoorbeeld van rood naar groen, dan verandert de status in het verkeersmodel op exact
hetzelfde moment.
• Als een detector aan de rand van het netwerk een voertuig detecteert, wordt op hetzelfde moment en dezelfde locatie
een voertuig in het verkeersmodel gegenereerd. Dit voertuig wordt hierna volgens de onderliggende principes van het
model gesimuleerd.
• Als een andere detector een voertuig detecteert vind er een realtime kalibratie van het verkeersmodel plaats. Een
speciaal hiervoor ontwikkeld algoritme zoekt het voertuig dat het meest waarschijnlijk de detectielus gedetecteerd is.
Dit voertuig wordt in het verkeersmodel verplaatst naar de locatie van de betreffende detectielus.
Modelled Car Data: de nieuwe databron
5
Het realtime verkeersmodel voorspelt het voertuiggedrag tussen twee detectielussen en corrigeert deze voorspelling
wanneer nieuwe informatie beschikbaar komt. Dit maakt het mogelijk de trajectoriën van individuele voertuigen te
bepalen. De trajectoriën van alle voertuigen samen geven een compleet beeld van het verkeer en maken het mogelijk om
bijvoorbeeld reistijden, intensiteiten, wachtrijlengtes en de HB-matrix van het netwerk te berekenen.
Figuur 2: het realtime verkeersmodel. Op basis van beperkte data worden de trajectoriën van individuele voertuigen berekend.
Bovenstaand voorbeeld illustreert de werking van het realtime verkeersmodel op basis van een enkele databron (VRI-data)
en modaliteit (gemotoriseerd verkeer). Het model is echter in staat om meerdere bronnen en modaliteiten te verwerken.
Hieraan zijn wel een tweetal voorwaarden verbonden:
• Bronnen gebaseerd op wegkantsystemen (puntmetingen) moeten in staat zijn om individuele voertuigen te detecteren
met een hoge penetratiegraad. Voorbeelden hiervan zijn detectielussen, radars, lasers, en camera’s. Onder andere
bluetooth-data zijn ongeschikt vanwege de relatief lage penetratiegraad.
• Bronnen gebaseerd op voertuigdata (trajectmetingen) moeten van een hoge gedetailleerdheid zijn en de locatie moet
nauwkeurig zijn. Voorbeelden hiervan zijn (ruwe) FCD en KAR (bussen).
• Alle modaliteiten kunnen gemodelleerd worden. Voorwaarde is dat de modaliteiten gemeten worden. Om bijvoorbeeld
fietsers te volgen is het een randvoorwaarde dat er fietsmonitoring aanwezig is.
MCD is dus de verzameling van alle berekende trajectoriën van alle verkeersdeelnemers in een netwerk gebaseerd op een
beperkt aantal, voornamelijk reeds aanwezige, databronnen in combinatie met een model.
6
Modelled Car Data: de nieuwe databron
PILOT N201
In samenwerking met de provincie Noord-Holland hebben we in januari 2016 een pilotstudie op de N201 ter hoogte van
Hoofddorp uitgevoerd. In deze studie hebben we de huidige met kentekencamera’s gemeten reistijden vergeleken met
reistijden berekend op basis van MCD.
In figuur 3 is het netwerk van de N201 weergegeven. Dit deel van de N201 heeft een lengte van 8 kilometer en is voorzien
van 6 VRI’s. Deze VRI’s zijn allemaal ontsloten op de provinciale VRI-server via Streaming VLOG. Op dit moment worden er
op vier deeltrajecten reistijden gemeten met kentekencamera’s.
Voor deze pilot hebben we een server ingericht waarop
de MCD berekend wordt. Deze server is aangesloten op
de provinciale VRI-server waar de Streaming VLOG van de
afzonderlijke VRI’s op de N201 gebundeld worden. Op de
MCD-server draait het realtime verkeersmodel en wordt de
MCD gegenereerd. Op basis van deze MCD worden reistijden
berekend die via een Datex-II-koppeling naar de provincie
gestuurd worden. Hier worden de reistijden vergeleken met
de gemeten reistijden door de kentekencamera’s.
In deze pilot hebben we alleen de Streaming VLOG
gegenereerd door de VRI’s als input voor het realtime
verkeersmodel gebruikt. De aanwezige kentekencamera’s,
maar ook andere databronnen als FCD, zijn niet als input
gebruikt. Het model van de N201 is geconfigureerd in
OpenTrafficSim.
Figuur 3: de N201 ter hoogte van Hoofddorp.
De locaties van de kentekencamera’s zijn weergegeven.
Figuur 4: het westelijke deel van het netwerk N201 in OTS
Modelled Car Data: de nieuwe databron
7
Het doel van de pilot was om de kwaliteit van de met MCD berekende reistijden te vergelijken met reistijden gemeten met
kentekencamera’s. Hiertoe zijn per dag de reistijden geaggregeerd naar minuutgemiddelden en tegen elkaar uitgezet. In
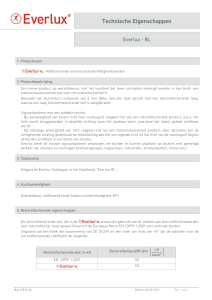
onderstaande grafiek is de vergelijking voor maandag 18 januari 2016 voor het traject tussen camera’s 1 en 2 opgenomen.
Figuur 5: Vergelijking camerameting en modeled car data N201
In onderstaande tabel zijn de resultaten voor het hele traject in beide richtingen weergegeven. Het percentage geeft
aan hoeveel procent van de berekende reistijden maximaal 10% afwijkt van de gemeten reistijden. Een score van 90%
betekent bijvoorbeeld dat 90% van de reistijden maximaal 10% afwijkt.
De gemiddelde betrouwbaarheid van de berekende reistijden ten opzichte van de referentiedata is 87%. Daarnaast zien
we dat de afwijkingen gespreid over de dag voorkomen, de betrouwbaarheid is tijdens de spitsperiodes even groot als
tijdens de dalperiodes. Dit betekent dat bijvoorbeeld vertragingen goed gedetecteerd worden met MCD.
Tabel 2: beoordeling reistijden MCD ten opzichte van referentiedata
TRAJECT
4JAN
5JAN
6JAN
7JAN
8JAN
11JAN
12JAN
13JAN
14JAN
15JAN
18JAN
19JAN
20JAN
1-4
14-11
87%
91%
86%
93%
90%
93%
81%
82%
86%
91%
75%
92%
75%
88%
88%
91%
84%
81%
84%
97%
84%
92%
81%
91%
87%
84%
8
Modelled Car Data: de nieuwe databron
CONCLUSIES
Modelled Car Data is een nieuwe databron voor realtime verkeersmonitoring en voor historische gegevens. MCD is
gebaseerd op een fusie van realtimemetingen door middel van een realtime verkeersmodel. Meerdere databronnen kunnen
worden gefuseerd, zodat er een betrouwbaar beeld van het verkeer ontstaat.
De eerste pilots laten zien dat MCD veelbelovend is. Op de N201 ter hoogte van Hoofddorp is aangetoond dat met MCD
over een langere periode betrouwbaar reistijden berekend kunnen worden. Daarnaast biedt MCD inzicht in indicatoren als
intensiteiten, wachtrijlengtes en de HB-matrix van een netwerk.
In tabel 3 is een overzicht van de verschillende methodieken, inclusief MCD, voor verkeersmonitoring opgenomen.
MCD biedt de mogelijkheid om veel verkeersinformatie te leveren tegen een hoge kwaliteit. Grootste nadeel is dat
MCD afhankelijk is van andere databronnen. Hierbij geldt dat met minder fysieke inwinning, meer verkeersinformatie
beschikbaar is.
Tabel 3: Overzicht van methoden voor permanente verkeersmonitoring, inclusief MCD
METHODE
INTENSITEIT
SNELHEID
REISTIJD
VOERTUIGCATEGORIE
Meetlussen
x
x
(x)
x
VRI’s
x
Camera’s
(locatie)
Kentekencamera’s
Radar/laser
(locatie)
x
x
x
x
Traffic Studs/
Tubes
FCD
x
(x)
(x)
MCD
x
KWALITEIT BIJZONDERHEDEN
+
-
x
x
x
BT/WiFiregistratie
HBMATRIX
(x)
+
x
x
x
x
x
x
x
x
x
(x)
(x) = bij dicht meetnet (snelweg)
O.a. afhankelijk van
ligging detectie
x
++
Meerdere camera’s
noodzakelijk
0/++
Grote verschillen in
uitvoering, mogelijkheden en kwaliteit
?
(x) = Afhankelijk van
type
steekproef Mogelijkheden
afhankelijk van
aanbieder
steekproef Meerdere registratiepunten noodzakelijk
+
Afhankelijk van andere databronnen
Doordat MCD doorgaans gebruik maakt van al beschikbare monitoring, zoals VRI-data, is het een kostenefficiënte manier
om onder andere intensiteit en reistijd te meten. MCD vormt hiermee een mogelijkheid om de toenemende wens voor
realtime monitoring en sturing te kunnen verenigen met een beperkt budget.
Naast levering van realtime verkeersinformatie aan bijvoorbeeld het NDW of verkeersmanagement centrales, is MCD
ook toepasbaar als databron voor verkeerssystemen. Door gebruik te maken van MCD heeft een VRI meer inzicht in
de verkeersstromen rondom een kruispunt, en kan hierdoor optimaler het verkeer regelen. MCD heeft de potentie een
belangrijk onderdeel van de intelligente VRI te worden.
Heeft u vragen over deze white paper? Of wilt u weten wat Modelled Car Data voor uw organisatie kan betekenen? Neem
dan contact op met Bas van der Bijl of Niels Henkens
Modelled Car Data: de nieuwe databron
9
BAS VAN DER BIJL
Bas is Reseach Manager bij Sweco en verantwoordelijk voor het ontwikkelen van
nieuwe concepten voor diensten en producten op het gebied van smart mobility.
Hierbij combineert hij zijn achtergrond in verkeersmodellen en verkeersmanagement met nieuwe ontwikkelingen. Bas is onder andere de bedenker van het product
Smart Traffic.
T +31 88 811 59 24
E [email protected]
NIELS HENKENS
Niels is adviseur Smart Mobility bij Sweco. Hij combineert een passie voor
data-analyse met een ruime ervaring in verkeersmanagement. Als adviseur
en projectleider op het gebied van Evaluatie & Monitoring en Operationeel
Verkeersmanagement was hij betrokken bij veel projecten waarbij het betrouwbaar
meten en analyseren van verkeer centraal stond.
T +31 88 811 56 51
10
Modelled Car Data: de nieuwe databron
E [email protected]
Sweco ontwerpt en ontwikkelt de samenlevingen en steden
van de toekomst. Ons werk leidt tot duurzame gebouwen,
efficiënte infrastructuur en toegang tot elektriciteit en
schoon water. Met 14.500 medewerkers in Europa, bieden wij
onze klanten voor elke situatie de juiste expertise.
Wij voeren jaarlijks projecten uit in 70 landen verspreid over
de hele wereld. Sweco is Europa’s grootste ingenieursadviesen architectenbureau, met een omzet van circa 1,7 miljard euro
(pro forma 2015) en is genoteerd aan de Nasdaq Stockholm.
Kijk voor een overzicht van onze vestigingen
op www.sweco.nl/contact