Speciale Relativiteitstheorie: deel 2
Vier-vectoren, impuls, massa en energie
Speciale Relativiteitstheorie: deel 2 ....................................................................................... 1
Vier-vectoren, impuls, massa en energie ............................................................................... 1
1. Intro ...................................................................................................................................... 2
1.1 Metrische tensor............................................................................................................ 2
1.2 Interval........................................................................................................................... 3
1.3 Vier-vector of Lorentz-vector ...................................................................................... 5
1.3.1 Lorentz transformatie ............................................................................................ 6
1.3.2 Viervector is ook een tensor.................................................................................. 7
2. Vier-vector voor de positie ................................................................................................. 8
3 Vier-vector voor de snelheid ............................................................................................... 9
3.1 Definitie en invariant ................................................................................................ 9
3.2 Lorentz transformatie.............................................................................................. 10
4. Klassieke mechanica en botsingen................................................................................... 10
4.1 Intro.............................................................................................................................. 11
4.2 Klassieke definitie van Impuls voldoet niet meer..................................................... 12
Voorbeeld A [2-in, 1-out systeem, 100% niet elastische botsing]................................. 12
5. Vier-vector voor energie-impuls ...................................................................................... 13
5.1 Definitie en fysische interpretatie .............................................................................. 13
5.2 Lorentz Transformatie ................................................................................................ 15
5.3 Vier-vectoren en behoudswetten................................................................................ 15
5.4 Behoudswetten en Invariant ....................................................................................... 17
5.4.1. Invariant van een som van vier-vectoren .......................................................... 19
5.4.2. Deeltjes zonder massa (Photonen)..................................................................... 19
5.4.3. Annihilatie en creatie.......................................................................................... 19
5.5 Systemen met meerdere partikels .............................................................................. 20
5.5.1 Verschil tussen aparte vrije deeltjes en systemen............................................. 20
5.5.2. Numerisch Voorbeeld A [2-in, 1-out, niet-elastische botsing]........................ 20
6. Discussie ............................................................................................................................ 22
6.1 Waarom zijn vier-vectoren belangrijk? ..................................................................... 22
6.2 Relativistische massa: equivalentie van massa en energie....................................... 23
8. Conclusies.......................................................................................................................... 24
Appendix A: Transformatie van de Lorentz factor......................................................... 26
Appendix B: Formularium................................................................................................ 27
Appendix C: behoudswetten gelden in elk frame ........................................................... 28
Appendix D: Nul-momentum frame en Massacentrum frame ....................................... 29
Appendix E: Lorentztransformatie................................................................................... 30
References.......................................................................................................................... 31
1
In dit hoofdstuk bespreken we de wiskundige basis waarop de Speciale
Relativiteitstheorie is gebouwd. Dit betekent een Covariante formulering waarin viervectoren, die ook tensoren zijn, de hoofdrol spelen. Het belang hiervan is gebaseerd op de
basisstelling van de tensorrekening: ‘Als een tensor vergelijking of identiteit waar is in
één coordinaatsysteem dan is ze ook waar in alle coordinaat systemen.” (Zie hoofdstuk
‘2b Tensorrekening’)
Het voordeel van deze aanpak blijkt in het bijzonder wanneer deze wordt toegepast op
massa en energie met de daaraan gerelateerde behoudswetten waarmee bijvoorbeeld
botsingsverschijnselen worden bestudeerd en die om deze reden dan ook zijn opgenomen
in dit hoofdstuk. Dit leidt verder tot enkele fundamentele beschouwingen over massa en
energie die dan ook in dit hoofdstuk zijn opgenomen.
1. Intro
De Speciale Relativiteitstheorie stapt af van het principe waarbij tijd en ruimte
gescheiden zijn en introduceert in de plaats daarvan een vierdimensionale ruimtetijd
continuum waarin een gebeurtenis gekenmerkt wordt door een coordinaten viertal
waarvoor we twee notaties kunnen hanteren x i = ( x 0 , x1 , x 2 , x 3 ) = (ct , x, y, z ) . Een
vectoriele grootheid wordt beschreven met behulp van een basis en componenten. Er zijn
r
r
twee keuzes mogelijk: een contravariante1 manier x = x i ei en covariante manier
r
r
x = xi e i . Tenzij expliciet anders vermeld, worden deze vier grootheden gemeten in een
Cartesisch orthonormaal assenstelsel (orthogonale assen en eenheidsvectoren van gelijke
lengte). De SRT maakt alleen gebruik van inertiaalframes waarvan de snelheid constant
is.
1.1 Metrische tensor
Een metrische tensor is een functie die als input twee vectoren neemt en als output een
getal (scalar) produceert zodat afstanden (intervallen) gedefinieerd zijn. In SRT
gebruiken we een vlakke ruimte die niet Euclidisch is. De covariante metrische tensor is
gedefinieerd als
0
1 0 0
0
0 −1 0
η ij =
= diag (1,−1,−1,−1) Equation 1
0 0 −1 0
0 0 0 − 1
De contravariante metrische tensor is gedefinieerd als η ijη jk = δ ki zodat η ij = η ij .
Daarom worden η ij en η ij elkaars inverse genoemd. Met behulp van de metrische
tensor kunnen indices van positie veranderen (van onder naar boven en omgekeerd) zodat
1
Contravariant betekent dat de componenten en de basisvectoren omgekeerd reageren op een transformatie.
Covariant betekent dat ze in dezelfde zin reageren.
2
covariante en contravariante vormen in elkaar worden omgezet: xi = ηij x j & xi = ηij x j
Met andere woorden x0 = x0 ; x1 = − x1; x2 = − x 2 ; x3 = − x3 .
Als we een ander coordinaten systeem gebruiken wordt de metrische tensor berekend als
ds 2 = g ij dx i dx j . Bijvoorbeeld in 3D sferische coordinaten x a = (t , r , θ , ϕ ) wordt de
metrische tensor diag(1,-1,-r2, -r2sin 2(θ). Dit lijkt een andere metriek maar het punt is dat
deze door een (terug)transformatie opnieuw in de vorm van η kan worden gebracht.
Uiteraard is dit niet altijd mogelijk en dit betekent dan dat in deze situatie de ruimte niet
vlak is.
1.2 Interval
In het geval van de Speciale Relativiteitstheorie is het interval (afstand) tussen twee
gebeurtenissen gedefinieerd als
∆s 2 = ( s1 − s 2 ) 2 = (ct1 − ct 2 ) 2 − ( x1 − x 2 ) 2 − ( y1 − y 2 ) 2 − ( z1 − z 2 ) 2
Als de afstand daarenboven tussen de twee punten infinitesimaal klein wordt gemaakt
dan noemen we dit het Minkowski lijnelement
ds 2 = ( dt ) 2 − ( dx) 2 − (dy ) 2 − ( dz) 2
(2)
Equation 2
Dit kan geschreven worden met behulp van de metrische tensor als
ds 2 = dxi dx i = η ij dx i dx j = η ij dxi dx j
Equation 3
Als beide gebeurtenissen te maken hebben met zenden respectievelijk ontvangen van
licht is het interval gelijk aan nul.
ct
C
F
G
E
D
B
A
x
Figure 1 Afstanden berekenen volgens het Minkowski lijnelement in 2D (dt2- dx2) De y en z dimensie
zijn weggelaten.
Voorbeeld
De figuur toont een ct versus x plot. De y en z dimensie zijn weggelaten. De afstanden in
de linkerdriehoek zijn de volgende: |AB|=3, |AC|=5 en |BC|=sqrt(52- 32)=4, waaruit volgt
dat |AC| > |BC|. Met andere woorden de schuine zijde is niet de langste omdat dx2 moet
2
Opmerking over de notatie: dx2 moet gelezen worden als (dx)2
3
worden afgetrokken. Meer nog, AC is groter dan elke schuine zijde omdat er het
minimum (nul) wordt afgetrokken. De afstanden in de rechterdriehoek DEF zijn de
volgende: |DF|=4, |DE| = |EF|=0 want licht-achtig.
Voorbeeld
Als we radius vectoren beschouwen (beginpunt in de oorsprong) kunnen we de
meetkundige plaats zoeken van alle vectoren met een gegeven lengte. Dus het equivalent
van een cirkel in de Euclidische ruimte. Als we de y en z dimensie buiten beschouwing
laten dan is de afstand van een punt (ct,x) tot de oorsprong is gegeven door
∆s 2 = (ct − 0) 2 − ( x − 0) 2 zodat (ct ) 2 − x 2 = λ = const . Dit is een hyperbool. De waarde
van λ wordt afgelezen op de x-as waar t=0.
Classificatie van intervallen (lichtkegel)
Als ds2 > 0 dan noemen we het interval tijd-achtig, als ds2 < 0 dan noemen we het
interval ruimte-achtig, en als ds2 = 0 dan noemen we het interval licht-achtig of een nullinterval. In geval van een tijdachtig interval is de hoek tussen de wereldlijn en de ct as
kleiner dan 45°. In geval van een ruimteachtig interval is de hoek tussen de wereldlijn en
de x as kleiner dan 45°
Tijd-achtig Interval tussen 2 gebeurtenissen
Het testdeeltje beschrijft dan een wereldlijn. Het is logisch dat onder deze
omstandigheden de afstand gemeten wordt als een tijd, meer bepaald de eigentijd
ds2 = dτ2 = dt2- dx2- dy2- dz2
Men zou het kunnen vergelijken met een wielerkoers waar de afstand tussen de kopgroep
en het peloton ook uitgedrukt wordt in sec of min.
De metriek geeft een verband tussen de infinitesimale verandering van de eigentijd (dτ)
en van de coordinaten. De meting van de aparte coordinaatverschillen (dt, dx, dy, dz)
hangen af van de snelheid van de passerende inertiele waarnemer maar de eigentijd is
invariant, d.w.z. dezelfde voor elke waarnemer. De eigentijd τ is dus de echte fysische
afstand en bijgevolg een zinvolle kostfunctie waarvan we het extremum willen bepalen.
Ruimte-achtig Interval tussen 2 gebeurtenissen
Volledigheidshalve vermelden we ook de duale ruimte-achtige situatie waarbij de afstand
wordt gemeten als een ruimtelijke afstand die we de eigen-afstand σ noemen
ds2 = dσ2 = - dt2+ dx2+dy2+dz2
Merk de verandering van de tekens op. Afstand wordt gemeten door 2 gebeurtenissen te
definieren die gelijktijdig plaatsvinden, althans voor de betrokken waarnemer.
Gelijktijdigheid is een relatief begrip.
(∆σ)2=(∆s)2 - (∆x0)2
Hierin is ∆σ de eigen-afstand, die onafhankelijk is van de waarnemer. Of anders
geformuleerd, ook de eigenafstand is invariant.
Tijd-achtige wereldlijn
In de rest van dit verhaal is een tijd-achtige wereldlijn of curve verondersteld. Dit
betekent dat de raaklijn in elk punt tijd-achtig is.
4
1.3 Vier-vector of Lorentz-vector
Een vier-vector is een gericht lijnsegment in een 4D ruimte-tijd net zoals een 3D vector
in een 3D ruimte. De vier dimensies komen op een gelijkwaardige manier aan bod. De
notatie gebruikt hoofdletters voor vier-vectoren en hun componenten. Er zijn twee
soorten: contravariante vectoren die we noteren met superscripts als
V ν = (V 0 ,V 1 ,V 2 ,V 3 ) en covariante vectoren waarvoor we subscripts gebruiken
Vµ = (V0 ,V1 ,V2 ,V3 ) . Vectoren noemen we contravariant als de componenten en de basis
op een tegengestelde manier reageren op een transformatie. Voorbeelden van
contravariante vectoren zijn verplaatsing, snelheid, kracht en versnelling. Covariant
betekent dat de componenten op dezelfde manier als de basis veranderen (co-vary) bij
een transformatie. Voorbeelden zijn covectoren zoals de gradient.
r
r
We kunnen Vµ = (V0 ,V1 ,V2 ,V3 ) ook schrijven als V = (V0 , v ) waarmee expliciet wordt
gemaakt dat vier-vectoren een combinatie zijn van een scalar V0 met een 3D
ruimtevector, die we noteren met kleine letters als (v1,v 2,v3). Op deze manier worden
begrippen samengebracht die in de klassieke mechanica apart worden gezien,
bijvoorbeeld ruimte en tijd maar verder in dit verhaal ook impuls en energie.
r
Niet elk viertal vormt een vier-vector. Bijvoorbeeld, U = (c, u x , u y , u z ) is geen vierr
vector maar U = (γc, γu x , γu y , γu z ) daarentegen wel. De reden is dat er eisen of
voorwaarden zijn waaraan vier-vectoren moeten voldoen. Deze eisen zijn een gevolg van
de postulaten van de SRT. Deze postulaten zijn:
1. De wetten van de fysica zijn dezelfde in alle inertiaalframes.
2. De snelheid van het licht is dezelfde in alle inertiaalframes
Uit het eerste postulaat volgt dat het in de SRT gaat over transformaties tussen inertiaal
systemen. Dit betekent dat een vrij deeltje waarop geen krachten werken ook in het
getransformeerde stelsel met constante snelheid beweegt. Hieruit volgt dat de
coefficienten in de transformatieformules constant moeten zijn.
Vervolgens bespreken we de gevolgen van het tweede postulaat. Als de coordinaten van
gebeurtenissen 1 en 2 gelijk zijn aan (ct1,x1,y1,z1) en (ct2,x2,y2,z2) in inertiaalframe S en
((ct)’1,x’1,y’1,z’1) en ((ct)’2,x’2,y’2,z’2) in een tweede inertiaalframe S’, dan wordt het
postulaat van constante lichtsnelheid geschreven als volgt.
c=
( x1 − x2 ) 2 + ( y1 − y 2 ) 2 + ( z1 − z 2 ) 2
(t1 − t 2 )
=
( x'1 − x' 2 ) 2 + ( y '1 − y ' 2 ) 2 + ( z '1 − z ' 2 ) 2
(t '1 −t ' 2 )
Hieruit volgt dat het ruimtetijd interval hetzelfde is in S en S’: (∆s) 2 = (∆s' ) 2 of
(ct1 − ct 2 ) 2 − ( x1 − x 2 ) 2 − ( y1 − y 2 ) 2 − ( z1 − z 2 ) 2 = (ct '1 −ct ' 2 ) 2 − ( x'1 − x' 2 ) 2 − ( y '1 − y ' 2 ) 2 − ( z '1 − z ' 2 ) 2
Deze expressie kan worden gezien als de vergelijking van een bol waarbij licht in alle
richtingen propageert vanuit de oorsprong en waarvan de straal op tijdstip t gelijk is aan
ct.
5
1.3.1 Lorentz transformatie
Def [Lorentz transformatie]
Een
Lorentz
transformatie
is
elke
lineaire
coördinaat
transformatie
a
∂x'
x a → x' a = b x b = La b x b die bovendien het lijnelement onveranderd laat. ■
∂x
Een coördinaten transformatie die de afstand bewaart kan worden gezien als een rotatie.
Met een Euclidische afstandsmaat is dit eenvoudig. Stel een positie vector OA die
getransformeerd wordt. Dan bevindt het resultaat OB zich op een cirkel met de afstand
als straal. Als φ de rotatie hoek is tussen beide posities dan kan het verband tussen de
coordinaten na de rotatie (B) uitgedrukt worden als functie van de coordinaten voor de
rotatie (A) als (zie Figuur 2, links)
xB = r cos(ϕ A + ϕ ) = r cos(ϕ A ) cos(ϕ ) − r ⋅ sin(ϕ A ) sin(ϕ ) = xA cos(ϕ ) − y A sin(ϕ )
yB = r sin(ϕ A + ϕ ) = r sin(ϕ A ) cos(ϕ ) + r ⋅ cos(ϕ A ) sin(ϕ ) = y A cos(ϕ ) + x A sin(ϕ )
y
x0
x0
B
x’
A
φA
B
A
s sinh(θ)
φ
0
x0
s
θ
x
1
x
A
φ
φA
1
x
1
O
s cosh(θ)
x
1
x’
Figure 2 Een transformatie waarbij de afstandsmaat behouden blijft kan gezien worden als een
rotatie. In de Euclidische ruimte leidt dit tot een rotatie op een cirkel (links) en in de Minkowski
ruimte tot een hyperbolische rotatie (midden en rechts).
Als we hetzelfde doen in een Minkowski context met de bijhorende afstandsmaat dan is
de curve met constante afstand tot de oorsprong een hyperbool (ct ) 2 − x 2 = s 2 i.p.v. een
cirkel. De coördinaten van A zijn x = s ⋅ cosh(θ ) en ct = s ⋅ sinh(θ )
Dan moet de cirkelrotatie vervangen worden door een hyperbolische rotatie. De
transformatie formules voor een rotatie van A naar B zijn
x' 0 = r cosh(ϕ A + ϕ ) = r cosh(ϕ A ) cosh(ϕ ) + r ⋅ sinh( ϕ A ) sinh( ϕ ) = x 0 cosh(ϕ ) + x 1 sinh( ϕ )
x'1 = r sinh( ϕ A + ϕ ) = r sinh( ϕ A ) cosh(ϕ ) + r ⋅ cosh(ϕ A ) sinh( ϕ ) = x 1 cosh(ϕ ) + x 0 sinh( ϕ )
Voor een rotatie in wijzerzin veranderen de tekens van de sinh termen. Het is eenvoudig
te checken dat ( x' 0 ) 2 − ( x '1 ) 2 = ( x 0 ) 2 − ( x 1 ) 2
[
] [
]
Definitie [Vier-vector]
6
Een vier-vector is elke set van vier componenten waarbij de transformatie tussen
inertiaalframes verloopt volgens het onderstaande Lorentz patroon dat in twee notaties is
weergegeven
V '0 = γ (V 0 − βV 1 )
V 0 = γ (V '0 + βV '1 )
V '1 = γ (V 1 − βV 0 )
V 1 = γ (V '1 + β V '0 )
V '2 = V 2
V '3 = V 3
&
V 2 = V '2
ct ' = γ (ct − β x)
x' = γ ( x − βct )
ct = γ (ct '+ βx' )
x = γ ( x'+ βct ' )
&
y' = y
y = y'
z' = z
V 3 = V '3
Equation 4
z = z'
■
Uitgaande van de Lorentztransformatie kan ook gemakkelijk geverifieerd worden dat
voldaan is aan de invariantie van de afstand, bijvoorbeeld de lengte van een vector.3
1.3.2 Viervector is ook een tensor
Waarom werken we met vectoren als we covariantie willen? Hebben we daar geen
tensoren voor nodig? Het antwoord is dat de vier-vector ook een tensor is omdat hij
voldoet aan de transformatie regels voor tensoren. We geven het voorbeeld van een
contravariante vector waarvoor we de definitie in herinnering brengen. Hetzelfde geldt
voor covariante vectoren.
Definitie: [ Contravariante tensor]
Een vectorveld V is een contravariante tensor (respectievelijk een covariante vector) van
dx' r
orde één als de componenten Ti in x en T’i in x’ voldoen aan T 'i = i T r (respectievelijk
dx
i
dx
T 'i = r Tr ) ■
dx'
∂x' r
De afgeleiden van coordinaten
kunnen we vinden uit de coördinaat transformaties
∂x i
∂x' r
Als we dit dan vervolgens invullen in V 'i = V r
om de ‘tensor test’ uit te voeren
∂x i
vinden we dat hieraan voldaan is en dat we terug de Lorentz patronen bekomen.
2
3
2
2
2
2
2
2
2
V0 '2 −(V1 '2 +V2 '2 +V3 '2 ) = γ 2V0 + β 2γ 2V1 − 2 βγV0V1 − γ 2V1 − β 2γ 2V0 + 2 βγV0V1 − V2 − V3 =
2
2
2
2
2
2
(γ 2 − β 2γ 2 )V0 − (γ 2 − β 2γ 2 )V1 − V2 − V3 = V0 − (V1 + V2 + V3 )
waarbij γ 2 − β 2γ 2 = 1 − β 2 1 − β 2 = 1
7
0
1
2
3
∂x'r
0 ∂x '
1 ∂x '
2 ∂x '
3 ∂x '
=
V
+
V
+
V
+
V
= V 0γ − V 1βγ
∂x0
∂x 0
∂x0
∂x0
∂x 0
∂x'r
∂x'0
∂x'1
∂x'2
∂x'3
V '1 = V r 1 = V 0 1 + V 1 1 + V 2 1 + V 3 1 = −V 0 βγ + V 1γ
∂x
∂x
∂x
∂x
∂x
1
2
r
0
∂x'
∂x'
∂x'
∂x'
∂x'3
V '2 = V r 2 = V 0 2 + V 1 2 + V 2 2 + V 3 2 = V 2
∂x
∂x
∂x
∂x
∂x
0
1
2
r
∂x'
∂x'
∂x'
∂x'
∂x'3
V '3 = V r 3 = V 0 3 + V 1 3 + V 2 3 + V 3 3 = V 3
∂x
∂x
∂x
∂x
∂x
V '0 = V r
Hieruit kunnen we dus afleiden dat 1) de componenten veranderen door een transformatie
en 2) dat er een menging ontstaat tussen de verschillende componenten. Ook het
omgekeerde geldt. Als een vector op deze manier transformeert is het een vier-vector.
Scalair product (Inwendig product)
Het scalair product van twee vectoren is een operatie op twee vectoren die een afstand
reflecteert.
r r
r
r
r r
A • B = ( A µ eµ )( Bν eν ) = ( A µ Bν )(eµ eν ) = A µ Bν η µν = A µ B µ = Aν Bν
Hieruit volgt de invariantie bij transformatie
r r r r
A • B = A'• B' → A 0 B 0 − A1 B1 − A 2 B 2 − A 3 B 3 = A' 0 B ' 0 − A'1 B'1 − A' 2 B' 2 − A' 3 B' 3
Dit leidt tot de vraag hoe we vier-vectoren kunnen vinden. Hieronder zal blijken dat een
goede strategie er in bestaat te vertrekken van een bestaande vier-vector om nieuwe te
construeren .
2. Vier-vector voor de positie
De baan die een deeltje volgt kan worden beschreven door de vier ruimtetijd coordinaten
als functie van een parameter te schrijven die voor ieder punt van de baan een andere
waarde krijgt. Voor deze parameter wordt de eigentijd τ gekozen. Een positie vector of
r
r
een gebeurtenis in de ruimte-tijd wordt voorgesteld als X = (ct , x ) of
X α = ( X 0 (τ ), X 1 (τ ), X 2 (τ ), X 3 (τ )) = (ct , x, y, z )
Equation 5
De invariant is gelijk aan het reeds eerder genoemde interval (ct ) 2 − ( x 2 + y 2 + z 2 ) = τ 2
De invariantie heeft altijd te maken met fysische principes. In dit geval is dat het constant
zijn van de lichtsnelheid.
Door de Lorentz transformatie toe te passen op deze vier-vector leggen we een verband
tussen de coordinaten in S met deze in S’. We nemen aan dat de beide stelsels de x-as
(index 1) gemeenschappelijk hebben en dat de beweging volgens deze as verloopt
(waarbij S’ beweegt volgens de positieve richting van de x-as) en waarbij de 0-de
coordinaat te maken heeft met tijd. De y-as en de z-as nemen niet deel aan de beweging.
De bekende Lorentz transformatie formules zijn hierboven reeds genoemd.
8
3 Vier-vector voor de snelheid
3.1 Definitie en invariant
De vier-positie vector is de basis die gebruikt wordt om snelheid vier-vector of de viersnelheid te creeren. Als X een vier-vector is dan is dX het ook. D.w.z. dat lengte ||dX||
dezelfde is voor alle waarnemers. Verder is ook dτ dezelfde voor alle waarnemers.
Hetzelfde geldt dan ook voor het quotient, namelijk U α = dX α / dτ en dat is dus ook een
geldige vier-vector.
De vier-snelheid is gedefinieerd als de afgeleide van de positievector naar de eigentijd τ:
U α = dX α / dτ = (U 0 , U 1 , U 2 ,U 3 ) = (γc, γu x , γu y , γu z )
waarin U 0 = dX 0 / dτ = d (ct ) / dτ = cγ en U i =
2
Equation 6
dX i dX i dt
=
= u iγ
dτ
dt dτ
2
2
Hierin is γ u = 1 / 1 − u 2 / c 2
& u 2 = u x + u y + uZ .
Er is een verschil tussen de parallelle component (evenwijdig met de richting van
beweging) ux enerzijds en de laterale componenten uy en uz anderzijds. Er geldt
ux =
u' x +v
1 + u' x v / c 2
uy =
&
u' y 1 − v 2 / c 2
1 + u' x v / c 2
=
u' y
γ v (1 + u ' x v / c 2 )
Equation 7
u' 1 − v 2 / c 2
u'z
uz = z
=
2
1 − u'x v / c
γ v (1 − u ' x v / c 2 )
De snelheidsvector geeft de verandering van zowel de tijd als de ruimte-coordinaten en
raakt aan de wereldlijn. Dit kan ook geschreven worden als een scalar en een drie-vector
r
r
U = (γc, γu ) waarin u de drie-snelheidsvector dxi/dt voorstelt. Als we de lengte van de
vector berekenen met inachtname van de metriek vinden we de invariant
r r
U • U = (γc) 2 − (γv x ) 2 + (γv y ) 2 + (γv Z ) 2 = γ 2 c 2 − (v x2 + v 2y + v z2 ) =
[
]
[
]
1
c 2 − v 2 = c2
v2
1− 2
c
[
]
Equation 8
Hetzelfde resultaat wordt ook gevonden door een meebewegend frame te kiezen zodat de
r
drie-snelheid nul wordt, de Lorentzfactor γ=1 en U = (c,0,0,0) zodat de invariant gelijk
is aan c2.
Merk op dat het vervangen van de afgeleide naar τ door de afgeleide naar t geen viervector zou opleveren omdat dit voor elke waarnemer verschillend is. Immers, dit zou
leiden tot (c, v x , v y , v z ) (dus zonder γ) en dan zou de lengte gelijk zijn aan c 2 − v 2 wat
afhankelijk is van de snelheid zodat we zelfs niet van een vector kunnen spreken. Dus
niet elk viertal is een vier-vector.
9
3.2 Lorentz transformatie
r
Als U = (γc, γu x , γu y , γu z ) een vier-vector is dan moeten – bij de transformatie SS’ en
terug – de componenten met behulp van een transformatiematrix omgerekend tussen
beide frames volgens het reeds genoemde ‘Lorentz patroon’. Voor de vier-snelheid ziet
deze transformatie er als volgt uit.
U '0
U 0 − (v / c)U 1
1
1
0
U ' → γ U − (v / c)U
v
U '2
U2
3
3
U
U '
Equation 9
Bij wijze van verificatie kan dit ook op een alternatieve manier worden aangetoond. We
beschouwen één en hetzelfde deeltje en nemen aan dat de snelheid ten opzichte van S
gelijk is aan u en ten opzichte van S’ gelijk aan u’. Daarna drukken we het rechtstreekse
verband tussen u en u’ uit met behulp van de snelheid v waarmee S’ beweegt ten opzichte
van S
Dan blijkt het handig om enkele voorbereidende berekeningen te maken en op voorhand
de Lorentz transformatie uit te rekenen voor γu . Voor alle duidelijkheid is er een
subscript toegevoegd aan γ zodat de desbetreffende snelheid expliciet is gemaakt. Er
geldt dat
γu =
2
1
1 − (u / c)
2
2
2
= γ vγ 'u (1 + vu 'x / c 2 )
2
2
Equation 10
2
waarbij u 2 = u x + u y + u Z en u ' 2 = u ' x +u ' y +u ' Z Als de mapping in omgekeerde
zin gebeurt vervangen we v door –v. Voor meer info zie appendix A.
De Lorentz transformatie van de vier-snelheid kan nu worden geverifieerd op een direkte
manier.
U '0 = cγ 'u = cγ vγ u (1 − vu x / c 2 ) = γ v (cγ u − β v u xγ u ) = γ v (U 0 − β vU 1 )
U '1 = u ' x γ 'u =
U '2 = u ' y γ 'u =
U '3 = u ' z γ 'u =
ux − v
γ γ (1 − vu x / c 2 ) = (u x − v)γ vγ u = γ v (U 1 − β vU 0 )
2 v u
1 − vu x / c
uy 1− v2 / c2
1 − ux v / c 2
γ vγ u (1 − vu x / c 2 ) = u yγ u = U 2
Equation 11
uz 1 − v 2 / c2
γ vγ u (1 − vu x / c 2 ) = u zγ u = U 3
1 − u xv / c 2
4. Klassieke mechanica en botsingen
Een van de basisprincipes van de relativiteitstheorie is dat wetten van de fysica, zoals
behoud van impuls bij botsingen, geldig zijn in elk frame. In geval van een botsing
10
betekent dat dat de hoeveelheid van beweging of het impuls voor en na de botsing
behouden blijft in elk frame waarbij transformaties tussen frames verlopen volgens de
Lorentz formules. Als er geen uitwendige krachten werkzaam zijn op een systeem dan is
de impuls constant in de tijd.
We bespreken botsingen tussen objecten waarbij alleen de krachten van de botsing zelf
een rol spelen. Het gaat dus om een geisoleerd systeem waarbij er geen andere externe
krachten aanwezig zijn. In de klassieke mechanica bestaan twee behoudsprincipes: dat
van (klassieke) massa en dat van energie. Deze zijn nu samengebracht in één principe:
het behoud van massa-energie.
4.1 Intro
In de klassieke mechanica is het lineair impuls (ook hoeveelheid van beweging genoemd)
r
r
van een voorwerp gedefinieerd als een vectoriele grootheid p = mv . Hieruit volgt dat de
r
r
r
kracht als functie van de tijd gelijk is aan F = ma = dp dt . Als we nu een geisoleerd
systeem beschouwen van twee deeltjes die botsen waarbij geen uitwendige krachten een
rol spelen dan blijven er alleen de inwendige krachten over. Deze krachten kunnen een
grillig verloop kennen tijdens de korte tijd van contact die de botsing duurt. Alhoewel we
dit verloop van kracht als functie van de tijd niet kennen, kunnen we wel uitspraken doen
over de integraal naar de tijd die we impuls noemen. Voor elk voorwerp betrokken bij de
t2 r
r
botsing geldt I = ∫ Fdt = ∆p waarbij t1 en t2 het begin, resp. einde van de botsing
t1
voorstellen. Voor en na deze tijdstippen is de kracht 0 en de snelheid constant. Als we
twee voorwerpen beschouwen die met elkaar botsen dan is de derde wet van Newton
toepasbaar (actie is gelijk aan reactie). Hieruit volgt dat beide krachten gelijk en
tegengesteld zijn en dat het totale impuls van het systeem gelijk is aan 0. Behalve behoud
van impuls is er in de klassieke mechanica ook behoud van massa en, in geval van
elastische botsing, ook van kinetische energie.
We maken een onderscheid tussen elastische en niet-elastische botsing. Bij een nietelastische botsing komt er warmte vrij en/of heeft er vervorming plaats die energie
absorbeert. Als beide voorwerpen na de botsing met dezelfde snelheid bewegen en dus
samen één voorwerp vormen is de botsing voor 100% niet-elastisch. Bij een elastische
botsing blijft de kinetische energie behouden.
De kinetische energie K kan worden berekend als de arbeid gepresteerd door een externe
kracht, waarbij die kracht wordt aangewend voor de verhoging (of verlaging) van de
u =u
u =u
u =u
du
snelheid K = ∫ Fdx = ∫ m 0 dx = m 0 ∫ udu = 1 / 2m 0 u 2
dt
u =0
u =0
u =0
11
4.2 Klassieke definitie van Impuls voldoet niet meer
De klassieke definitie van impuls is compatibel met een Galilei transformatie maar niet
met een Lorentz transformatie. De nood aan een aanpassing van de definitie van impuls
kan worden geillustreerd met een voorbeeld.
Voorbeeld A [2-in, 1-out systeem, 100% niet elastische botsing]
We beschrijven eerst de situatie in een rustframe S. Stel dat een eerste voorwerp beweegt
langs de x-as met een snelheid u en dat er een botsing plaatsvindt met een tweede
voorwerp dat zich in S op de x-as in rust bevindt. Na de botsing bewegen beide deeltjes
samen, dus met dezelfde snelheid u3 , langs de x-as. Als de massa’s van de botsende
deeltjes gelijk zijn aan m dan geldt via de klassieke aanpak van behoud van impuls en
behoud van massa dat
m1u1 + m2 u 2 = m3 u 3
m u + m 2 u 2 u1
→ u3 = 1 1
=
m3 = m1 + m2
m1 + m2
2
Vervolgens beschrijven we de toestand in een tweede frame S’ waarvoor we een frame
kiezen dat meebeweegt met het deeltje 3 dat resulteert na botsing. Als v de snelheid
voorstelt van S’ t.o.v. S dan geldt v=u 3.
Frame S
Voor botsing
u1
Na botsing
Frame S’
u’1
u2
u3
x
u’2
u’3
x
Figure 3 Voorbeeld van een 100% niet-elastische botsing met de snelheden voor en na de botsing in
twee verschillende frames
We gebruiken de relativistische wet van het optellen van snelheden die we toepassen op
de drie lichamen. Het deeltje beweegt met een snelheid u’i in S’. S’ beweegt zich op zijn
beurt met een snelheid v = u3 ten opzichte van S. Het verband tussen ui en u’i wordt
gegeven door:
u 'i =
ui − v
& v = u 3 Equation 12
1 − ui v
In de figuur zijn de snelheden u’1 en u’2 berekend, waarbij rekening is gehouden met de
aanname dat u2=0. Vervolgens passen we in S’ dezelfde behoudswetten toe, namelijk
m1u '1 + m 2 u ' 2 = m3 u '3 &m3 = m1 + m2 , en we berekenen u’3. Als we dit resultaat
vergelijken met de oplossing in S na transformatie naar S’ concluderen we dat beide
frames tot een verschillende oplossing leiden.
12
Frame S
gegeven u1,u2
Lorentz transform
v = u3
u '1 =
u' 2 =
u1 − u1 / 2
2
1 − u1 / 2
=
u1
2 − u1
Frame S’
2
0 − u3
= −u 3 = u1 / 2
1 − 0u 3
Behoudswetten in S’
3
Behoudswetten in S
u
u
1
1 u
u '3 = ( 1 2 − 1 ) = ( 1 2 )
2 2 − u1
2
4 2 − u1
Lorentz transform
m u + m2 u 2 u1
u3 = 1 1
=
m1 + m2
2
u'3 =
v = u3
u '1
u1
1
=( )
2
2 2 − u1 2
?
Figure 4 De klassieke behoudswetten leiden tot foute resultaten in combinatie met de Lorentz
transformatie. De toepassing van deze wetten in twee frames waarbij de vertaling tussen beide
frames gebeurt via de Lorentz formules geeft twee verschillende resultaten.
De volgende figuur laat ook nog zien dat het probleem te maken heeft met de Lorentz
transformatie want de combinatie van de klassieke behoudswetten met een Galilei
transformatie leidt wel tot een consistent resultaat.
Frame S
gegeven
u ,u
Behoud toepassen
m1u1 + m2 u 2 = m3 u 3
m3 = m1 + m2
stel : m1 = m2 & u 2 = 0 ==>
m u + m2 u 2 u1
u3 = 1 1
=
m1 + m2
2
Galilei transform
v = u3
(Galilei transform)-1
v = −u 3
u '1 = u1 − u3 = u1 / 2
u ' 2 = u 2 − u3 = −u1 / 2
u '3 =
m1u '1 + m2 u ' 2
=0
m1 + m2
Figure 5 De combinatie van klassieke behoudswetten met een Galilei transformatie leidt wel tot
consistente snelheden.
Er is dus een aanpassing van de behoudswetten nodig. Daarbij zijn er twee
randvoorwaarden: 1) behoud van impuls moet gelden in elk frame en 2) als de snelheden
klein zijn ( u 0) moet er overeenstemming zijn met de klassieke mechanica.
5. Vier-vector voor energie-impuls
5.1 Definitie en fysische interpretatie
Deze vier-vector is gedefinieerd door de snelheidsvector te vermenigvuldigen met een
vier-scalar minv d.w.z. dat de scalar dezelfde is in elk frame of invariant
13
Pα = minvU α = minv
dX α
dX α
= minvγ
= minvγ u (c, u x , u y , u z ) = ( P 0 , P1 , P 2 , P 3 )
dτ
dt
Equation 13
De vier-scalar minv zal later op verschillende manieren ingevuld worden afhankelijk van
de context, zijnde aparte deeltjes of systemen bestaande uit meerdere deeltjes. In het
eerste geval wordt minv gedefinieerd als de rustmassa m0 gemeten door een
meebewegende waarnemer. In het tweede geval is de situatie complexer. We focusseren
voorlopig op aparte deeltjes en nemen dus aan dat minv = m0.
Wat stelt dit fysisch voor? We beginnen met P x = minvγ u u x (x=1,2,3). Er zijn twee limiet
situaties. Enerzijds voor snelheden die klein zijn in vergelijking met de lichtsnelheid
(u0), nadert de factor γ tot 1 en wordt er overeenstemming gevonden met het klassieke
impuls. Daarom noemen we Px het relativistisch impuls. Anderzijds, als een voorwerp
snel beweegt (uc) wordt het impuls oneindig ondanks het begrensd blijven van de
snelheid.
Wat is de fysische interpretatie van P0? Door een reeksontwikkeling toe te passen en met
c te vermenigvuldigen zien we dat de termen van de som energie voorstellen.
P 0 = minvγc =
minv c
= minv c(1 +
1 u2 3 u4
+
+ ...)
2 c2 8 c4
1− u2 / c2
1
3 minvu 4
cP0 = minv c 2 + minvu 2 +
+ ... = minv c 2 + Ekin
2
8 c2
Equation 14
We maken een onderscheid tussen twee vormen van energie: kinetische enerzijds en alle
andere vormen anderzijds. Deze laatste omvatten chemische, thermische, potentiele
energie etc...en zijn samengevat in de eerste term minvc2 omdat dit de enige term is die
niet afhangt van de snelheid u. Daarom noemen we deze term de rustenergie.
Alle andere termen hangen wel af van u. De tweede term (minvu2/2) is gelijk aan de
klassieke kinetische energie. Voor een lage snelheid is dit een goede benadering maar
voor grotere snelheden gebruiken we meerdere termen van de reeksontwikkeling omdat
dit de nauwkeurigheid verhoogt. De exacte uitdrukking voor de kinetische energie is
1
− 1 = cP 0 − minv c 2
Ekin = minv c 2
2
2
1− u / c
Equation 15
De kinetische energie lijkt dus helemaal niet op de kinetische energie uit de klassieke
mechanica. Verder concluderen we dat cP0 deze beide componenten bevat en dus een
maat is voor de totale energie. Via de invoering van de relativistische massa m wordt de
totale energie E voorgesteld in één van de bekendste formules uit de fysica
E = cP 0 = minv c 2 + E kin = mnvi c 2 + (γ − 1)minv c 2 = minv γc 2 = mc 2
Equation 16
Dit is de bekende wet van Einstein over de equivalentie van massa en energie: massa is
een maatstaf voor de totale energie. Als er energie wordt toegevoerd neemt de massa toe
ongeacht de preciese verschijningsvorm ervan. Uit E=mc2 volgt dat energie en massa
steeds in dezelfde verhouding aanwezig zijn. Dezelfde verhouding geldt ook wanneer
14
objecten in rust zijn: E0=m0c2 waarin E0 de rustenergie voorstelt en m0 de rustmassa.
Deze laatste is een maat voor de inertie en wordt dan ook inertie-massa genoemd.4
5.2 Lorentz Transformatie
Net zoals bij de viersnelheid kunnen we het Lorentz patroon checken.
r
Stelling: Als P = m0 γ v (c, u x , u y , u z ) een vier-vector is dan moet de transformatie
verlopen volgens het patroon
P 0 '
P 0 − ( v / c ) P1
1
1
P '
P − ( v / c) P 0
Te bewijzen
→ γv
P 2 '
P2
3
P3
P '
Bewijs
Stel S’ beweegt t.o.v. S met een snelheid v. Stel een deeltje A beweegt in S’ met een
snelheid u’. Dan is P 0 ' = m0 cγ 'u en P1 ' = m0 u ' x γ 'u '
P 0 ' = m0 cγ u ' = m0 cγ vγ u (1 − vu x / c 2 ) = m0γ v (cγ u − β v u x γ u ) = γ v ( P 0 − β v P1 )
P 1 ' = m0 u ' x γ u ' = m0
P 2 ' = m0 u ' y γ u ' = m0
P 3 ' = m0 u ' y γ u ' = m0
ux − v
γ γ (1 − vu x / c 2 ) = m0 (u x − v)γ vγ u = γ v ( P1 − β v P 0 )
2 v u
1 − vu x / c
u y 1 − v2 / c2
1− uxv / c
2
u y 1 − v2 / c2
1− uxv / c
2
γ v γ u (1 − vu x / c 2 ) = m0 u y γ u = P 2
γ vγ u (1 − vu x / c 2 ) = m0 u z γ u = P 3
5.3 Vier-vectoren en behoudswetten
Door vier-vectoren voor en na de botsing gelijk te stellen vinden we twee behoudswetten:
behoud van impuls en behoud van energie. We tonen nu aan dat dit leidt tot een correcte
oplossing aan de hand van een voorbeeld.
Voorbeeld B [twee-in, één-out, niet-elastische botsing]
Dit is hetzelfde als voorbeeld A maar algemener. Twee deeltjes met rustmassa m01, m02
bewegen in een rechte lijn met snelheden u 1, u2 in dezelfde richting. Ze botsen op een
100% niet-elastische wijze en vormen daarbij een derde deeltje met m03, u3 als rustmassa,
resp. snelheid. Gegeven de input deeltjes, bereken m03, u3 van het output deeltje.
We zoeken een algemene oplossing. We drukken het behoud uit van impuls en van
relativistische massa
4
Massa is verschillend van materie; massa (en energie) zijn eigenschappen en materie is het fysieke
medium dat drager is van deze eigenschappen. Conversie vindt dus alleen plaats tussen massa en energie,
niet tussen materie en energie.
15
r
r
r
γ u1m01u1 + γ u 2 m02u2 = γ u 3m03u3 (of p1 + p2 = p3 )
γ u1m01c + γ u 2 m02 c = γ u 3 m03c (of E1 + E2 = E3 ) .
Dit zijn twee vergelijkingen met twee onbekenden m03, u3. We tonen aan dat de
behoudswetten nu wel geldig blijven onder een Lorentz transformatie. De snelheid wordt
gemakkelijk berekend door substitutie van de tweede vergelijking in de eerste en geeft als
γ m u +γ m u
resultaat u3 = u1 01 1 u 2 02 2 . Vervolgens berekenen we 1 − u32 en γ u 3 als tussenstap.
γ u1m01 + γ u 2 m02
1 − u32 =
(γ u1m01 + γ u 2 m02 )2 − (γ u1m01u1 + γ u 2 m02 u2 )2
(γ u1m01 + γ u 2 m02 )2
=
2
(1 − u12 )(γ u1m01 ) 2 + (1 − u 02
)(γ u 2 m02 ) 2 + 2γ u1m01γ u 2 m02 (1 − u1u 2 ) (m01 ) 2 + (m02 ) 2 + 2γ u1m01γ u 2 m02 (1 − u1u 2 )
=
(γ u1m01 + γ u 2 m02 )2
(γ u1m01 + γ u 2 m02 )2
1
γ u3 =
1− u
2
3
(γ u1m01 + γ u 2 m02 )
=
2
2
m01 + m02 + 2γ u1m01γ u 2 m02 (1 − u1u 2 )
Invullen in de tweede vergelijking (behoud van energie) geeft
m03 =
2
2
γ u1m01 + γ u 2 m02 (γ u1 m01 + γ u 2 m02 ) m01 + m02 + 2γ u1m01γ u 2 m02 (1 − u1u 2 )
=
⇒
γ u3
(γ u1m01 + γ u 2 m02 )
2
2
m03 = m01 + m02 + 2γ u1m01γ u 2 m02 (1 − u1u 2 )
Vereenvoudiging: m01= m02= m0
γ u1u1 + γ u 2 u 2
γ u1 + γ u 2
u3 =
γ u3 =
1
1 − u 32
(γ u1 + γ u 2 )
=
2
2 + 2γ u1γ u 2 (1 − u1u 2 )
2
m03 = m01 + m02 + 2γ u1m01γ u 2 m02 (1 − u1u2 ) = m0 2 1 + γ u1γ u 2 (1 − u1u 2 )
Door een verdere vereenvoudiging, waarbij we u2 gelijk aan nul houden, is dit gelijk aan
voorbeeld A.
u3 =
1 − 1 − u12 / c 2 1 − 1 − u12 / c 2
γ u1u1
u
1
1
c
⇒ 3 =
=
=
=
= (1 − 1 − u12 / c 2 )
2
2
2
2
2
2
1
γ u1 + 1 u1 1 +
1 − (1 − u1 / c )
u1 / c
u1
1 + 1 − u1 / c
γ u1
γ u3 =
1
2
3
1− u
2
=
(γ u1 + 1)
2 + 2γ u1
= (1 + γ u1 ) / 2
2
m03 = m01 + m02 + 2γ u1m01γ u 2 m02 (1 − u1u2 ) = m0 2 1 + γ u1 = 2 m0γ u 3
16
Figuur 6 geeft een overzicht van de berekening op een gelijksoortige manier als Figuur 2.
Frame S
gegeven u1,u2
Lorentz transform
v = u3
Behoudswetten in S
(Lorentz transform)-1
u 3 = c(1 − 1 − u12 / c 2 )
v = −u 3
u '1 =
u1 − u 3
= u3
1 − u1u 3
u'2 =
u 2 − u3
= −u 3
1 − u 2u3
Frame S’
Behoudswetten in S’
γ ' u ' +γ ' u '
u ' 3 = u1 1 u 2 2 = 0
γ ' u 1 +γ ' u 2
Figure 6 De nieuwe behoudswetten leiden tot correcte snelheden in combinatie met de Lorentz
transformatie. De toepassing van deze wetten in twee frames waarbij de vertaling tussen beide
frames gebeurt via de Lorentz formules geeft consistente resultaten.
In frame S passen we de behoudswetten toe wat leidt tot u3 zoals aangegeven. Vervolgens
transformeren we naar S’ waarvoor we een frame kiezen dat meebeweegt met het
outputdeeltje 3. Dan vinden we uit de behoudswetten dat u’3 gelijk is aan nul. De
conclusie is dat het resultaat deze maal correct is waarbij de behoudswetten toegepast
worden binnen elk frame en waarbij de koppeling tussen frames gaat via de Lorentz
transformatie.
5.4 Behoudswetten en Invariant
Er is een groot verschil tussen grootheden die behouden worden en die invariant zijn.
Behoud betekent ‘hetzelfde voor en na de botsing’ en is gekoppeld aan één enkel frame.
Invariant betekent ‘hetzelfde in elk frame voor elke waarnemer’ en heeft dus te maken
met meerdere frames.
Behoudswetten zijn gebaseerd op gelijkheden van vier-vectoren voor en na de botsing.
Het gaat dus over elke entry van een viervector, d.w.z. behoud van de (totale) energie (E
of de relativistische massa) en behoud van elke component (px,p y,pz) van het impuls.
Maar een relativistische massa kan verschillen van waarnemer tot waarnemer en is dus
niet invariant.
Bij de rustmassa speelt het omgekeerde verhaal. Afhankelijk van het type reactie wordt
de rustmassa soms niet behouden omdat deze bij de botsing wordt omgezet in andere
vormen van energie. Anderzijds is de lengte van een vier-vector niet afhankelijk van de
waarnemer en dus invariant. Invariantie is vaak een fysische eigenschap van een systeem
of een gevolg daarvan. Bijvoorbeeld, de invariantie van de vier-positie vector (de lengte
van deze vector of het ruimte-tijd interval) is een gevolg van een constante lichtsnelheid.
Zo ook betekent de invariantie van de lengte van de impuls-energie vector dat de
rustmassa constant is.
De totale energie, de impuls en de rustmassa zijn gelinkt in de energie-impuls relatie
E2
c
2 2
(mc )
=
E02
+ (cp ) 2
c
Equation 17
2 2
( m0 c )
17
K
E=mc2
pc
E=mc2
pc
E’
p’c
E0=m0c2
E0=m0=0
2
2 2
2
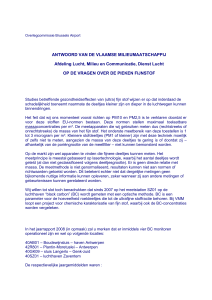
Figure 7 In de vlakke ruimte van de speciale relativiteitstheorie geldt E = ( m0 c ) + (cp) .
terwijl E en p afhangen van de coordinaten. (vb. E’ en p’c). Hierin is m0 de invariante massa of
rustmassa en m=E/c2 de relativistische massa.
Het verband tussen de verschillende soorten massa’s – de relativistische massa en de
invariante massa die gelijk is aan de rustmassa in geval van aparte deeltjes - is grafisch
weergegeven in bijgaande figuur. De horizontale zijde (die m0c2 voorstelt) is invariant
terwijl de andere zijden afhankelijk zijn van de coordinaten. Een eerste waarnemer meet,
bijvoorbeeld, (E, p) en een tweede (E’, p’). Deze grootheden zijn via een
Lorentztransformatie met elkaar verbonden. Er geldt dan
E 2 − (cp) 2 = E '2 −(cp' ) 2 = ( m0 c 2 ) 2
Voorbeeld:[één massief lichaam]
Stel dat we als voorbeeld van een fysisch systeem een klomp goud van 1 kg kiezen. Stel
verder dat dit geen gesloten systeem is maar dat we vanuit de omgeving warmte
toevoegen zodat de temperatuur met 10° C stijgt. Dan zal de rustmassa toenemen met
1.4 *10-14 Kg. Omgekeerd, als het systeem warmte uitstraalt zal de rustmassa afnemen.
Het is dus mogelijk – dank zij de relativiteitstheorie – dat de rustmassa (inertiele massa)
verandert door energie uitwisseling met de omgeving.
Voorbeeld [Voorbeeld B sectie 5.3 ]
Hetzelfde geldt in voorbeeld B sectie 5.3. Vermits dit een niet-elastische botsing is treedt
er vervorming op die warmte genereert. Daarom kan men verwachten dat de rustenergie
toeneemt. We stellen inderdaad vast dat de rustmassa in frame S na de botsing gelijk is
aan m03 = 2m0 γ 3 > 2m0 , waar 2m0 de rustmassa is voor de botsing .
Daarenboven kunnen we dezelfde berekening uitvoeren in frame S’. We vertrekken van
γ 'u1 m'01 c + γ 'u 2 m'02 c = γ 'u 3 m'03 . Vermits de rustmassa’s voor object 1 en 2 niet afhangt
van de coordinaten geldt dat m'01 = m01 = m0 & m'02 = m02 = m0 en vermits u’3=0 geldt
γ 'u 3 = 1 en vermits u '1 = u 3 / 2 & u ' 2 = −u 3 / 2 geldt γ u 3 m01 + γ u 3 m02 = m'03 zodat
2γ u 3 m0 = m'03 en m' 03 = m03
18
De conclusie is dus dezelfde als in frame S, namelijk dat de som van de rustmassa’s voor
en na de botsing kunen verschillen. De rustmassa m wordt niet behouden bij een botsing.
Maar de rustmassa’s veranderen niet ten gevolge van een Lorentz transformatie.
Merk op dat m=m0γ wel behouden blijft want dat is gelijk aan de energie.
5.4.1. Invariant van een som van vier-vectoren
r
r
Als we uitgaan van P = ( E , cp ) dan kunnen we twee deeltjes beschouwen die elk worden
r
r
r
r
voorgesteld door een vier-vector P i = ( Ei , cpi ) & P j = ( E j , cp j ) en waarvan het scalair
r r
r
r
product gelijk is aan P i • P j = Ei E j − cpi • cp j
Als we vervolgens uitgaan van twee botsende deeltjes i en j dan tellen we eerst beide
vectoren op en berekenen de invariant als volgt
r
r
r
r
r
r
r
r
r
r
P i + P j = ( Ei + E j , cpi + cp j ) → s 2 = ( P i + P j ) • ( P i + P j ) = ( P i + P j ) 2 =
r
r
r
r
r r
2
2
( Ei + E j ) 2 − (cp i + cp j ) 2 = Ei + E j + 2 Ei E j − (cp i ) 2 − (cp j ) 2 − 2cp i cp j =
r r
r r
= ( Ei0 ) 2 + ( E 0j ) 2 + 2 Ei E j − 2c 2 p i p j = (m0i c 2 ) 2 + (m0 j c 2 ) 2 + 2 Ei E j − 2c 2 p i p j
5.4.2. Deeltjes zonder massa (Photonen)
In de klassieke mechanica geldt voor een massaloos deeltje dat p=E=0-vector. Dit
betekent dat het deeltje in feite niet bestaat. In de Relativistische mechanica zijn in eerste
instantie de energie en het impuls ongedefinieerd (0/0). Maar dit kan opgelost worden
met behulp van de invariant E 2 = ( mc 2 ) 2 + (cp) 2 waaruit volgt E=cp. Massaloze deeltjes
hebben dus een impuls en een energie en dus bestaan ze. De enige beperking is dat de
snelheid in elk frame gelijk is aan de lichtsnelheid. Voorbeelden zijn het photon en het
graviton.
5.4.3. Annihilatie en creatie
Een electron en een positron (anti-electron) met gelijk maar tegengesteld momentum
(p=1,55 GeV/c) botsen waarbij ze allebei verdwijnen en er twee photonen ontstaan.
e-+e+γ+γ
We berekenen de massa van dit deeltje als volgt. De energie van het electron kan worden
berekend.
Ee2 = c 2 pe2 + m 2 c 4 = (1.55GeV ) 2 + (0.000511GeV ) 2 ≈ (1.55GeV ) 2
De energie van het positron is daar aan gelijk. E p2 = Ee2 .De massa van het nieuwe deeltje
wordt dan als volgt berekend waarbij de totale impuls gelijk is aan nul.
2
2
2
( Mc 2 ) 2 = Etot
− c 2 ptot
= E tot
→ Mc 2 = Etot = 1.55GeV + 1.55GeV
De totale energie van beide photonen is gelijk aan de som van de kinetische energie van
electron en positron plus de som van de restmassa’s van electron en proton gedeeld door
c2.
19
5.5 Systemen met meerdere partikels
5.5.1 Verschil tussen aparte vrije deeltjes en systemen
Systemen bestaan uit meerdere deeltjes, m.a.w. het zijn meer complexe objecten, die
worden beschreven via twee views: een abstracte externe en een gedetailleerde interne
view. Extern wordt de beweging beschreven als een globale beweging van het
massacentrum en intern door een beweging van het object ten opzicht van hetzelfde
massacentrum. De invariante massa is bedoeld als abstractie van het interne gedrag en als
model voor de externe beweging. De invariante massa karakteriseert een systeem zodat
het later geanalyseerd kan worden in een willekurige externe omgeving. Hieruit volgt dat
voor de invariante massa alleen de interne beweging meegenomen en dus niet de globale
beweging van het object.
De berekening is gebaseerd op het optellen van viervectoren van de deeltjes die samen
het systeem vormen. In het algemeen schrijven we voor de componenten van deze vector
r
r
Etotaal = ∑ Ei en p totaal = ∑ p i
i
i
waarbij gesommeerd wordt over alle deeltjes in het systeem. Dit maakt het plausibel om
de invariante massa M van een subsysteem te definieren met behulp van Equation 17
r
( Etotaal / c) 2 − ( p totaal ) 2 = ( Mc) 2 zodat het rechterlid constant is. Merk op dat
M = ∑ γ i m0 ,i ≠ ∑ m 0,i
i
i
Net zoals bij een vrij deeltje, is ook hier een eenvoudiger oplossing mogelijk door een
speciaal frame te kiezen, namelijk dat van de waarnemer die meebeweegt met het massa
centrum; dan is p totaal=0 zodat het resultaat is M=Etotaal /c2 onafhankelijk van de snelheid
van de waarnemer.
[Voorbeeld: container gevuld met gas]
Stel dat we beschikken over een container gevuld met een ideaal gas. We beschouwen dit
dus als een collectie geïdealiseerde botsende partikels die opgesloten zijn in een
massaloze container en waarop geen krachten werkzaam zijn. Als de container in zijn
geheel in rust blijft dan beweegt het massacentrum niet en is de rustmassa gelijk aan de
som over alle deeltjes van E/c. Als er energie uitgewisseld wordt met de omgeving (bijv.
Warmte) dan verandert dus ook de rustmassa.
5.5.2. Numerisch Voorbeeld A [2-in, 1-out, niet-elastische botsing]
Dit is hetzelfde voorbeeld van Figuur 1. We zullen dit beschouwen in 3 verschillende
frames: S, S’ en S” die gedefinieerd zijn als het meebewegend stelsel van respectievelijk,
deeltje 2, deeltje 3 en deeltje 1. Zoals in figuur 1, nemen we aan frame S de snelheid van
deeltje 1 gelijk is aan 3c/5 terwijl beide rustmassa’s gelijk zijn aan m01 = m02 = 8 kg. Voor
elk frame is een onderscheid gemaakt tussen de situatie voor en na de botsing. De tabel is
verdeeld in een linkerhelft die de deeltjes apart beschouwd en de rechterhelft die de groep
van deeltje 1+2 als één entiteit beschouwd.
20
Aparte deeltjes vectoren
minv
u
id
Voor
Na
Voor
S’
Na
S”
Voor
E/c
px
inv
Etot/c
ptot
Mtotc
m0γc
m0γu
(E/c)2
-p2
Mγc
mγu
(mc)2
18c
6c
288c2
18c
6c
288c2
−1
u2 2
1 − 2
c
m0
S
γ
Systeem(1+2) (1’+2’)
1
8
3c/5
5/4
10c
6c
64c2
2
8
0
1
8c
0
64c2
3
6 8
c/3
3/ 8
18c
6c
288c2
1’
8
c/3
3/ 8
3c 8
c 8
64c2
2’
8
-c/3
288c2
3c 8
6c 8
0
3/ 8
− c 8 64c2
3’
6 8
0
1
0
288c2
6c 8
0
288c2
1”
8
0
1
6c 8
8c
0
64c2
18c
-6c
288c2
2”
8
-3c/5
5/4
10c
-6c
64c
2
-6c
288c2
18c
-6c 288c2
r
r
Tabel 1 Rekenvoorbeeld van het behoud van het impuls p = mγu en de totale energie E / c = mγc .
na
3”
6 8
-c/3
3/ 8
18c
De resultaten zijn samengevat in bijgaande tabel. De linkerhelft stelt de drie vier-vectoren voor in elk
stelsel en de rechterhelft (laatste drie kolommen) toont de toestand na merging van de twee
inputvectoren 1 en 2. Er zijn twee componenten getoond (E/c en px) evenals de invariant. In de
linkerhelft is ook de rustmassa getoond.
De volgende observaties kunnen worden gemaakt.
1. Invariante massa voor een vrij deeltje
Voor voorbeelden van een meebewegende waarnemer, zie de deeltjes 2, 3’ en 1” in
de tabel. Uit de tabel blijkt ook dat de rustmassa dezelfde blijft voor alle waarnemers.
Bijvoorbeeld, vector 1 vergeleken met 1’ (64c2), of een vergelijking tussen 3 en 3’
(288c2). Een voorbeeld van de berekening van de invariant in het geval van een
bewegende waarnemer, zie vector 2 zodat 100 c2-36 c2 = 64 c2
2. De rustmassa wordt niet behouden bij botsing
Dit voorbeeld laat zien dat m03>2m0 of met getallen dat 6 8 >16 (zie ook de tabel).
Conclusie: de som van de rustmassa’s voor en na de botsing is niet gelijk. De
rustmassa m0 wordt niet behouden bij een botsing. Merk op dat γm0 wel behouden
blijft want dat is gelijk aan de energie.
3. Multi-deeltjes systeem
r
r
r
In tabel 1 zijn de inputvectoren 1 en 2 opgeteld als volgt: p1+ 2 = p1 + p 2 = 6 + 0 = 6
en E1+ 2 = E1 + E 2 = 8c + 10c = 18c . De basisprimitieven (de aparte deeltjes), zijn
21
gekarakteriseerd door de rustmassa m=8. Na merging van vectoren 1 en 2 tot het
systeem (1+2) is dit gekarakteriseerd door M2=288c2.
In tabel 2 is dezelfde botsing getoond voor twee verschillende beginsnelheden van
deeltje 1 resp deeltje 4. De karakterisatie van de de basisprimitieven is dezelfde
gebleven maar één hierarchisch niveau hoger hebben de interne deeltjes andere
snelheden wat vertaald wordt naar een andere invariante massa M. (288 vs 341)
Aparte vrije deeltjes
M
id
S
Voor
Na
Voor
S
Na
1
u
m0
8
3c/5
γ
u2
1 − 2
c
5/4
E/c
px
inv
mγ c
mγu
(mc)2
10c
6c
64c2
Systeem(1+2)
(1’+2’)
Etot/c
ptot
Mtotc
−1 / 2
2
2
8
0
1
8c
0
64c
3
6 8
c/3
3/ 8
18c
6c
288c2
4
8
4c/5
5/3
5
8
0
1
6
32 3 / 3
c/2
2/ 3
40c/3 32c/3
8c
0
64c2
64c2
Mγc
mγ u
(mc)2
18c
6
288c2
18c
6
288c2
64c/3 32c/3 341c2
64c/3 32c/3 341c2 64c/3 32c/3 341c2
Tabel 2 Twee voorbeelden van een niet-elastische botsing die alleen verschillen in de beginsnelheid
van deelte 1 en 4 respectievelijk. Dit verschil heeft impact op de uiteindelijke view van de gemergde
combinatie (1+2 en 4+5) (laatste kolom)
6. Discussie
6.1 Waarom zijn vier-vectoren belangrijk?
Stel dat we een botsing hebben waarbij een aantal deeltjes betrokken zijn. Dan willen we
elk deeltje voorstellen via een vier-vector waarin zowel de energie als de het impuls
vertegenwoordigd zijn. Stel dat Ii de deeltjes voor de botsing representeren en Oi na de
botsing.
r
r
r
r r
I 1 + I 2 + ... = O1 + O2 + O3 + ...
1
4243 1442443
I res
Equation 18
Ores
Vermits de Lorentz transformatie lineair is, is de som van vier-vectoren zoals de
resulterende input of output vector, ook een vier-vector is. Dit laat toe om de uiteindelijke
vergelijking die geldt voor een frame S te schrijven als een vector vergelijking met in het
rechterlid de nulvector. Vermits de nulvector bij transformatie op een nulvector wordt
afgebeeld kan dit worden gebruikt om een wet van behoud ook te laten gelden voor een
ander frame S’.
r
r
r
r
r
r
r
r
r
r
I res = Ores ⇒ I res − Ores = 0 ⇒ I 'res −O 'res = 0 ⇒ I 'res = O 'res
22
Equation 19
Conclusie: Er is een nauw verband tussen vectoren en de behoudswetten in de fysica,
meer bepaald, hun geldigheid voor meerdere waarnemers. Dank zij het werken met
tensoren, weten we dat, als een behoudswet geldt voor één waarnemer, ze ook geldt voor
alle waarnemers. Of anders gezegd, als de som van vectoren in S een gesloten n-hoek
vormen, dan vormen ze ook een n-hoek na een Lorentz transformatie niettegenstaande al
de componenten van alle vectoren andere waarden kunnen hebben .
Ditzelfde kan ook op een directe manier bewezen worden (Appendix C)
6.2 Relativistische massa: equivalentie van massa en energie
Einstein definieerde het volgende gedachtenexperiment. Stel dat we beschikken over een
holle buis met massa M en lengte L. Er wordt een foton uitgezonden aan de linkerzijde en
dat wordt geabsorbeerd aan de rechterzijde. We tonen aan dat de massa die hoort bij het
foton gelijk is aan m=E/c2.
Stel dat het foton wordt uitgezonden in punt A en beweegt naar rechts. Hierbij hoort een
impuls p=E/c. Omdat het een geisoleerd systeem betreft moet het totale impuls gelijk zijn
aan 0 zodat de buis naar links beweegt met een snelheid v zodat
(M-m)v=E/c
waarbij m de massa is die hoort bij het foton.
De tijd die de puls nodig heeft om de overzijde te bereiken is t=(L-x)/c. Gedurende
dezelfde tijd legt de buis een afstand x=tv. Eliminatie van t geeft
(L-x)/c=x/v
Eliminatie van v geeft
EL / c 2 = x(M − m + )E / c 2 )
A
V
x
Figure 8 Gedachte-experiment van Einstein waarin de equivalentie van energie en massa wordt
aangetoond en de bekende formule E=mc2 wordt afgeleid.
Vermits alle krachten intern zijn moet het massacentrum steeds op dezelfde plaats
blijven. Hieruit volgt Mx=mL. Invullen geeft
23
ELM / c 2 = mL( M − m + E / c 2 )
M ( E / c 2 − m) = m(−m + E / c 2 )
( M − m)(− m + E / c 2 ) = 0
m = E / c2
Deze massa m is de relativistische massa, die gemeten wordt door een waarnemer die
met een constante snelheid beweegt ten opzichte van het object. In het andere geval,
waarbij de waarnemer niet beweegt ten opzichte van het voorwerp, meten we de
rustmassa m0, die een maat is voor inertie en die we dan ook ‘inertie massa’ noemen.
Deze wordt gevonden door alle energie (inclusief potentiele energie) van de
samenstellende delen op te tellen.
Energy en massa zijn eigenschapppen van objecten (deeltjes en systemen). In feite
stellen E en m één en dezelfde eigenschap voor en is het verschil alleen gerelateerd aan
het meten met verschillende eenheden. Het is net zoals x=ct waarbij de afstand op twee
manieren wordt uitgedrukt met twee verschillende eenheden (meter of lichtseconde) Men
kan dus, bijvoorbeeld, zeggen dat de rustmassa van een elektron gelijk is aan 0.51 MeV.5
Voor aparte vrije deeltjes geldt dat m= γm0 die gedefinieerd is zodat E=m c2
Voorbeeld: stel een afgesloten volume van een bepaald gas. Dan zal de interne beweging
toenemen met toenemende temperatuur. Dit wordt meegenomen zowel in de invariante
als in de relativistische massa. De globale beweging van het volume wordt echter alleen
meegenomen in de relativistische massa.
8. Conclusies
r
r
In de klassieke mechanica is het impuls gedefinieerd als p = mv maar dit is niet invariant
onder een Lorentztransformatie. Om dit op te lossen definieren we een energie-impuls
vier-vector die afgeleid is van de vier dimensionale tijd-ruimte vector.
dX α
dX α
r
Pα = minvU α = minv
= minv γ
= minv γ u (c, u x , u y , u z ) = ( E / c, p )
dτ
dt
Om een geldige vier-vector te bekomen moet de massa invariant zijn.
Dit leidt tot het bestaan van twee soorten massa: de invariante massa minv en de
relativistische massa m = γm0 . De twee grootheden die behouden worden in de
r
r
relativiteitstheorie bij een botsing zijn het impuls p = m0γu en de totale energie
E = m 0 γc 2 .
5
Weliswaar is eV een eenheid van energie, maar hij is ook geschikt als massa-eenheid, doordat de
massa m van een deeltje gelijk is aan E/c2. Strikt genomen drukt men dan de massa uit in eV/c2.
1 eV = 1,6 10 -19 CV en V=J/C zodat 1 eV = 1,6 10-19 J
massa m = E/c2 = 1,6 10 -19 J / 9 10 16 (m/s) 2 = 1,782 10-36 Nm(s/m) 2 = 1,782 10-36 kg (m/s2) m (s/m) 2
1,782 10 -36 kg
24
Dit betekent dat de invariante massa niet wordt behouden. Het voordeel hiervan is de
mogelijkheid voor creatie van nieuwe deeltjes zonder constraints op de rustmassa.
Hetzelfde geldt voor annihilatie, d.w.z. het volledig doen verdwijnen van deeltjes.
Net zoals het ruimte-tijd interval een invariant is voor de positievector is er hier ook een
invariant, die een verband legt tussen energie, impuls en invariante massa, namelijk
2
E 2 − ( pc) = (mc 2 ) 2
De totale energie is de som van de rustenergie en de kinetische energie.
E = mc 2 + E kin = mc 2 + (γ − 1)mc 2 = mγc 2
Voor systemen van meerdere deeltjes geldt het behoud van de volgende twee grootheden
r
r
E total = ∑ Ei en p total = ∑ pi
i
i
2
r
Er is een verband tussen beide ( E total ) 2 − ( p total c) = ( Mc 2 ) 2
Hierbij is M ≠ ∑ mi en wordt deze grootheid behouden.
i
De theorie is ook toepasbaar als minstens één van de deeltjes massaloos is.
25
Appendix A: Transformatie van de Lorentz factor
2
c 2 (1 + vu ' x / c 2 ) 2 − (v + u ' x ) 2 − (u ' 2y (1 − v 2 / c 2 ))
2
c2 − ux − u y =
=
=
=
=
(1 + vu ' x / c 2 ) 2
c 2 + (vu ' x / c) 2 + 2vu ' x −v 2 − u ' 2x −2vu ' x −u ' 2y +u ' 2y v 2 / c 2 ))
(1 + vu ' x / c 2 ) 2
c 2 + (vu ' x / c) 2 − v 2 − u ' 2x −u ' 2y +u ' 2y v 2 / c 2 ))
(1 + vu ' x / c 2 ) 2
c 2 − v 2 − u ' 2x −u ' 2y + (u ' 2x +u ' 2y )(v / c ) 2 ))
(1 + vu ' x / c 2 ) 2
c 2 (c 2 − v 2 ) + (u ' 2x +u ' 2y )(v 2 − c 2 )
γu =
c 2 (1 + vu ' x / c 2 ) 2
1
1 − (u / c)
2
=
Als v=u’ wordt dit
c
2
c −u
2
=
1
1 − (u / c) 2
=
=
c 2 − v 2 − u ' 2x −u ' 2y +(vu ' x / c) 2 + u ' 2y v 2 / c 2 ))
(1 + vu ' x / c 2 ) 2
c 2 − v 2 + (u ' 2x +u ' 2y )(v 2 / c 2 − 1))
=
(1 + vu ' x / c 2 ) 2
(c 2 − v 2 )(c 2 − (u ' 2x +u ' 2y ))
c 2 (1 + vu ' x / c 2 ) 2
cc(1 + vu ' x / c 2 )
2
c − u'
=
2
2
c −v
1 + (u ' / c) 2
1 − (u ' / c) 2
26
2
=
=
c 2 (c 2 − v 2 )(c 2 − (u ' 2x +u ' 2y ))
(c 2 + vu ' x ) 2
cc(1 + vu x ' / c 2 )
2
cc 1 − u ' / c
2
2
1− v / c
2
= γ v γ 'u (1 + vu ' x / c 2 )
Appendix B: Formularium
vier-vectoren
S’S
SS’
0
0
X = ct = γ v (ct '+ β v x' )
1
X ' = x' = γ v ( x − β v ct )
X 1 = x = γ v ( x'+ β v ct ' )
X '2 = y ' = y
X 2 = y = y'
X '3 = z ' = z
U '0 = cγ 'u = γ v (cγ u − β v uγ u )
X 3 = z = z'
U 0 = cγ u = γ v (cγ 'u + β v u ' γ 'u )
U '1 = u ' x γ 'u = γ v (u x γ u − β v c γ u )
U 1 = u x γ u = γ v (u ' x γ ' u + β v cγ ' u )
U ' 2 = u ' y γ 'u = u y γ u
U 2 = u y γ u = u ' y γ 'u
U '3 = u ' z γ 'u = u z γ u
U 3 = u z γ u = u ' z γ 'u
P'0 = mcγ 'u = γ u ( P 0 − β v P1 )
P 0 = mcγ u = γ 'u ( P'0 + β v P'1 )
P'1 = P' x = mu ' x γ 'u = γ u ( P1 − β v P 0 )
P1 = P x = mu xγ u = γ 'u ( P'1 + β v P'0 )
P'2 = P' y = mu ' y γ 'u = P 2
P 2 = P y = mu yγ u = P'2
P'3 = P' z = mu ' z γ 'u = P 3
P 3 = P z = mu z γ u = P'3
X ' = ct ' = γ v (ct − β v x)
Ruimte-tijd
Snelheid
r
r
U = (γc, γu )
2
γ = 1/ 1 − u / v
2
Energie-Impuls
E = mc 2 + E kin
r
r
p = mu
Lorentz transformatie
u' x =
u'y =
Snelheid
ux − v
1− uxv / c2
ux =
u y 1− v2 / c2
uy =
1− uxv / c2
uz 1− v2 / c2
u'z =
1 − uxv / c2
γ 'u = γ v γ u (1 −
vu
)
c2
1 + (u / c) 2
1 − (u / c) 2
if
Gamma
γ u = 1 / 1 − (u / c) 2
γ 'u =
u' x + v
1 + u'x v / c 2
u' y 1 − v 2 / c 2
1 + u'x v / c 2
u' z 1 − v 2 / c 2
uz =
1 + u'x v / c 2
γ = γ vγ 'u (1 +
v=u
27
γu =
1 + (u ' / c) 2
1 − (u ' / c) 2
vu '
)
c2
if
v = u'
Appendix C: behoudswetten gelden in elk frame
Ditzelfde kan ook op een directe manier bewezen worden
r r r
r r r
Stelling: Als A, B, C vier-vectoren zijn van de deeltjes A, B, C in S en A' , B' , C ' van
dezelfde deeltjes in S’ en als de behoudswetten gelden in S dan gelden ze ook in S’.
A0 + B0 + C 0
A0 '+ B0 '+C 0 '
A + B +C r
A '+ B '+C r
1
1
Gegeven 1
Te bewijzen 1 1 1 = 0
=0
A2 + B2 + C 2
A2 '+ B2 + C 2 '
A3 + B3 + C 3
A3 '+ B3 + C 3 '
Bewijs
A0 ' B0 ' C 0 '
A0 − (v / c) A1
B0 − (v / c) B1
C 0 − (v / c)C1
A ' B ' C '
A − (v / c ) A
B − (v / c ) B
C − (v / c)C
0
1
0
0
1 + 1 + 1 →γ 1
+γv
+γv 1
v
A2 ' B2 ' C 2 '
C2
A2
B2
A3
B3
C3
A3 ' B3 ' C3 '
A0 '+ B0 '+C 0 '
A0 + B0 + C 0
A1 + B1 + C1
A '+ B '+C
A + B +C
A + B + C
1
1
0
0
0
1 1 1 →γ 1
− γ vβ
v
A2 '+ B2 + C 2 '
A2 + B2 + C 2
A2 + B2 + C 2
A3 '+ B3 + C3 '
A3 + B3 + C 3
A3 + B3 + C 3
Als we S i = Ai + Bi + C i noteren dan wordt het bovenstaande
S 0 ' = γ v ( S 0 − βS1 )
S1 ' = γ v ( S1 − βS 0 )
S2 '= γ vS2
S 3 ' = γ v S3
De wetten van behoud in S’ worden dan geschreven als S i ' = 0 . Vermits γ v , β ≠ 0 volgt
hieruit dat S i = 0 .
28
Appendix D: Nul-momentum frame en Massacentrum frame
De beweging van een complex systeem kan worden gesplitst in een beweging van het
massacentrum en een beweging van een systeem ten opzichte van het massacentrum. Het
massacentrum beweegt als een hypothetisch deeltje als gevolg van de resultante van alle
uitwendige krachten. Het is gedefinieerd als
m x + m2 x 2
m y + m2 y 2
m z + m2 z 2
xM = 1 1
yM = 1 1
zM = 1 1
m1 + m2
m1 + m2
m1 + m2
r
mr
Of in vectornotatie rM = ∑ i i waaruit volgt dat de snelheid van het massacentrum
∑ mri
r
dr
r
∑ m i vi .
gelijk is aan vM = M =
dt
∑ mi
Een “nul-momentum frame” is een frame waarin de som van alle momenta gelijk is aan
nul. Dit geldt ook voor de som van de externe krachten. Dit betekent dat het
massacentrum in rust is (of een constante snelheid heeft) en dat de invariant kan
vereenvoudigd worden tot m0 c 2 = E 2 − (cp) 2 = E 2 .
Voorbeeld [drie deeltjes systeem]
De beginsituatie is gedefinieerd in een rustframe S. Vervolgens beschrijven we de
toestand in een tweede frame S’ waarvoor we een frame kiezen dat meebeweegt met het
massacentrum dat zich bevindt halverwege de deeltjes 1 en 2 voor de botsing en dat
samenvalt met het deeltje 3 dat resulteert na botsing.
Frame S
Voor otsing
u1
Frame S’
u’1
u2
Na botsing
u3
mγ u1c
mγ u1u1
mc
0
+
=
u’2
u’3
Mγ u 3 c
Mγ u 3 u1
mγ 'u1 c
+
mγ 'u1 u '1
Toepassing van de wetten van behoud leidt tot 2 vergelijkingen
mγ 'u1 u '1 + mγ ' u 2 u ' 2 = 0
mγ 'u1 c + mγ 'u 2 c = Mc
29
mγ 'u 2 c
− mγ 'u 2 u '1
=
Mc
0
Appendix E: Lorentztransformatie
Een coordinatentransformatie xx’ wordt gekenmerkt door de partiele afgeleide tussen
∂x' a
beide coordinaten x' a = b x b = La b x b die we herbenoemen als La b . De
∂x
coordinatentransformatie wordt gegeven door
x' 0 = L0 0 x 0 + L0 1 x1
x'1 = L1 0 x 0 + L11 x 1
Vermits S’ met een constante snelheid moet bewegen moet La b constant zijn.
Uit (∆s) 2 = (∆s' ) 2 volgt
η kl ∆x k ∆x l = η mn ∆x' m ∆x' 'n = η mn Lm k ∆x k Ln l ∆x l = η mn Lm k Ln l ∆x k ∆x l
Dit leidt tot de volgende vergelijking die constraints oplegt aan de transformatie.
η kl = η mn Lm k Ln l
Als we dit uitschrijven krijgen we
η 00 = η mn Lm 0 Ln 0 ⇒ η 00 = η 00 L0 0 L0 0 + η11 L1 0 L1 0 ⇒ 1 = L0 0 L0 0 − L1 0 L1 0
(1)
η 01 = η mn Lm 0 Ln 1 ⇒ η 01 = η 00 L0 0 L0 1 + η11 L1 0 L11 ⇒ 0 = L0 0 L01 − L1 0 L11
( 2)
η11 = η mn L 1 L 1 ⇒ η11 = η 00 L 1 L 1 + η L L ⇒ −1 = L 1 L 1 − L L
(3)
η10 = η mn L 1 L 0 ⇒ η10 = η 00 L 1 L 0 + η L L ⇒ 0 = L 1 L 0 − L L
Uit (2) volgt L0 0 = L11 L1 0 / L0 1 . Invullen in (1)
( 4)
m
0
n
m
0
n
0
1 1
11 1 1
0
0
1 1
11 1 0
0
0
0
1 1
1 1
1 1
1 0
( 3)
1 = L0 0 L0 0 − L1 0 L1 0 = ( L11 L1 0 / L01 ) 2 − L1 0 L1 0 = ( L1 0 / L0 1 ) 2 (( L11 ) 2 − ( L01 ) 2 ) →
( L1 0 / L01 ) 2
zodat L1 0 = ± L0 1 Opnieuw invullen in (1)
3
(1) → L0 0 L0 0 = 1 + L1 0 L1 0 = 1 + L01 L01
L11 L11 ⇒ L0 0 = ± L11
→
De transformatieformules moeten dus van de vorm zijn
x'0 = L0 0 x 0 + L0 1 x1 = γx 0 + γβx1
x'1 = ±( Là 1 x 0 + L0 0 x1 ) = ±(γβx 0 + γx1 )
Alternatief
x'0 = L0 0 x0 + L01 x1 → dx'0 = L0 0 dx0 + L01dx1
x'1 = L10 x 0 + L11 x1 → x'1 = L10 dx0 + L11dx1
(dx'0 ) 2 = ( L0 0 ) 2 (dx0 ) 2 + ( L01 ) 2 (dx1 ) 2 + 2 L0 0 L01dx0 dx1
(dx'1 ) 2 = ( L10 ) 2 ( dx0 ) 2 + ( L11 ) 2 ( dx1 ) 2 + 2 L10 L11dx0 dx1
[
]
[
] [
]
(dx'0 ) 2 − ( dx'1 ) 2 = ( L0 0 ) 2 − ( L10 ) 2 ( dx0 ) 2 + ( L01 ) 2 − ( L11 ) 2 + 2 L0 0 L01 − L10 L11 dx0 dx1
0
2
1 2
0
(L 0 ) − (L ) = 1
( L01 ) 2 − ( L11 ) 2 = −1
L0 0 L01 − L10 L11 = 0
30
References
Daniel F. Styer, “Notes on Relativistic Dynamics”, Oberlin college, 2012,
http://www.oberlin.edu/physics/dstyer/Modern/RelativisticDynamics.pdf
Frank W. K. Firk, “Introduction to Relativistic Collisions”, Yale University
New Haven CT 06520, http://arxiv.org/ftp/arxiv/papers/1011/1011.1943.pdf
Jason Harlow and David M. Harrison , “Mass-Energy Equivalence and Relativistic
Inelastic Collisions” , Department of Physics , University of Toronto,
http://www.upscale.utoronto.ca/PVB/Harrison/SpecRel/MassEnergyEquivalence.pdf
D. Acosta, Relativity 4,
http://www.phys.ufl.edu/~acosta/phy2061/lectures/Relativity4.pdf
R. Serway, “Physics for scientists and engineers with Modern Physics”, Saunders College
Publishing, ISBN 0-03-015654-8, 1995
http://en.wikipedia.org/wiki/Mass_in_special_relativity
http://en.wikipedia.org/wiki/Center-of-impuls_frame
http://en.wikipedia.org/wiki/Mass%E2%80%93energy_equivalence#Mass.E2.80.93veloc
ity_relationship
Robert Resnick, “Introduction to Special Relativity”, New York, 1968
31
32