Stand der Techniek
Geïntegreerde Inbraakbeveiliging
DEEL 5
Toegangscontrole
TIS-project Inbraakbeveiliging
State of the Art
Geïntegreerde Inbraakbeveiliging
Deel5
Toegangscontrole
Inhoud
Deel 5: Toegangscontrole .............................................................................3
1 Inleiding....................................................................................................3
2 Intercomsysteem.....................................................................................3
3. Codeklavier .............................................................................................5
4. Magneetkaart ..........................................................................................6
5.1 De contactloze Smart Card – RFID ....................................................8
6. RFID .........................................................................................................8
6.1 RFID met passieve transponder .......................................................10
6.2 RFID met actieve transponder ..........................................................11
6.3 RFID met semi-passieve transponder...............................................11
6.4 RFID toepassingsvoorbeelden..........................................................11
6.4.1 RFID wandlezer (passief) .................................................................................. 11
6.4.2. RFID wandlezer (actief).................................................................................... 13
6.4.3 Mechatronische cilinder met geïntegreerde RFID-lezer.................................... 13
6.5 Toekomstige ontwikkelingen.............................................................14
7. Biometrie...............................................................................................15
7.1 Vingerafdrukken................................................................................16
7.1.1 Optische vingerafdrukscanner........................................................................... 18
7.1.2 Capacitieve scanner .......................................................................................... 19
7.1.3 RF vingerafdrukscanner .................................................................................... 22
7.1.4 Thermische vingerafdruksensor ........................................................................ 24
7.1.5 MEMS ................................................................................................................ 27
7.1.5.1 Piëzo resistief ................................................................................................. 28
7.2 Irisherkenning ...................................................................................29
Bibliografie................................................................................................32
2
Deel 5: Toegangscontrole
1 Inleiding
Een toegangscontrolesysteem zorgt ervoor dat u bepaalt wie waar toegang heeft. Met een
toegangscontrolesysteem heeft u dus controle over willekeurige en vrije toegang naar één of
meerdere beveiligde ruimtes. Indien de bezoeker toegelaten wordt tot de beveiligde ruimte zal
het toegangscontrolesysteem b.v. een elektromechanisch sluitwerk (elektrische sluitplaat,
motorslot, motorcilinder, solenoïde slot, automatische deuropener) aansturen waardoor de
toegangsdeur ontgrendeld en geopend kan worden.
Deze beveiligde ruimte kan ook een particuliere woning of een appartement zijn.
Bijkomend kunnen toegangscontrolesystemen de aan- of afwezigheid van bezoekers
registreren.
2 Intercomsysteem
Een intercomsysteem is een spreek-/luisterverbinding al dan niet gecombineerd met
videobeelden. Hierdoor is het mogelijk op afstand met iemand te communiceren en
eventueel iemand te identificeren.
Het systeem wordt bijvoorbeeld vaak toegepast in flats en appartementencomplexen, waar de
bewoners door de omvang van het gebouw niet kunnen zien wie er beneden aanbelt.
Meestal wordt gebruik gemaakt van een point-2-point-systeem*,
waardoor beide personen met elkaar kunnen communiceren. Wanneer
wordt aangebeld kan de bewoner een soort telefoon opnemen en
vragen wie aan de deur staat (of waarom diegene het pand wil
betreden). Indien de bewoner de persoon toegang wil verlenen, kan
deze door middel van een druk op een speciale knop de deur van op
afstand openen, b.v. door het aansturen van een elektrische sluitplaat.
Figuur 1
deurintercom
point-2-point
Moderne systemen zijn vaak ook voorzien van een videocamera
waardoor de bewoner nu ook kan zien wie heeft aangebeld – Figuur 2. U
kan dan alvorens u een gesprek wenst te voeren uw camera raadplegen om de bezoeker te
herkennen.
*
intercomsystemen worden onderverdeeld in twee systemen; point-2-point-systemen en partylinesystemen. Bij de eerste is communicatie tussen twee personen mogelijk, terwijl bij de laatste meerdere
personen met elkaar kunnen communiceren
3
De mogelijkheden zijn divers: van een eenvoudig
tweedraadsysteem zoals nog vaak wordt toegepast in
flatgebouwen en particuliere woningen – Figuur3-, tot
koppelingen met bijvoorbeeld gsm-netwerk of internet.
Er zijn zeer complexe systemen mogelijk met meerdere
camera's, volledig digitaal netwerk, gebruik makend van
bestaande coax netwerken, cat5 netwerken e.d., kleur of juist
Figuur 2 Deurintercom
met videocamera
zwart/wit beelden enz…
Figuur 3 Tweedraadssysteem intercom
Bij de toepassing van intercomsystemen en video-intercomsystemen voor toegangscontrole
dient er rekening gehouden te worden met de van kracht zijnde wetgeving in verband met de
bescherming van de persoonlijke levensfeer.
Zo dient er voor het plaatsen van intercomsystemen rekening gehouden te worden met de
wet van 30 juni 1994 betreffende de bescherming van de persoonlijke levenssfeer tegen het
afluisteren, kennisnemen en opnemen van privécommunicatie en –telecommunicatie.
Voor het gebruik van video-intercomsystemen dient er naast de bovenstaande regelgeving
eveneens rekening gehouden te worden met de wet 8 december 1992 betreffende de
bescherming van de persoonlijke levenssfeer ten opzichte van de verwerking van
persoonsgegevens (privacywet).
4
3. Codeklavier
Toegangscontrole via een codeklavier laat toegang tot het gebouw toe
op voorwaarde dat de bezoeker zich kan identificeren met een
toegangscode, welke op haar beurt wordt ingegeven via de toetsen van
het codeklavier. Het codeklavier zelf is uitgerust met de nodige
elektronica en uitgangrelais om op haar beurt een elektrische sluitplaat
Figuur 4
Codeklavier
of andere elektromechanische vergrendeling aan te sturen ingeval de
bezoeker toegelaten wordt.
Figuur 5 illustreert een toepassingsvoorbeeld van een codeklavier op een buitendeur voorzien
van een elektrische sluitplaat.
Figuur 5 Toepassingsvoorbeeld voor codeklavier op een toegangsdeur.
Codeklavieren komen ook voor geïntegreerd in
elektromechanisch deurbeslag waarbij het deurbeslag de
bediening van de dag- en nachtschoot van het DINinsteekslot zal vrijgeven indien men het codeklavier heeft
bediend met de correcte toegangscode – Figuur 6.
Figuur 6 Elektromechanisch
codeslot
5
4. Magneetkaart
Een magneetkaart is van kunststof voorzien van een
magneetstrip. Deze magneetstrip is opgebouwd uit op ijzeroxide
gebaseerde kleine ferromagnetische partikeltjes,
bijeengehouden in een plasticachtige film. Deze
ferromagnetische partikeltjes zijn eigenlijk kleine
staafmagneetjes (+/- een negenhonderdduizendste van een
mm lang).
Figuur 7 Magneetkaart
De opbouw en werking van deze magneetstrip is zeer gelijkend op die van de audiocassette.
Net zoals bij een audiocassette kan een magneetkaart beschreven worden door de kleine
staafmagneetjes in een bepaalde richting te gaan magnetiseren. Zo ontstaat er, afhankelijk
van de magnetiseringsrichting van het magneetstaafje, een
binaire 1 of 0.
Deze informatie kan op de magneetkaart magnetisch
geschreven worden door een magneetkaartschrijver.
Figuur 8
Magneetkaartschrijver
Dit is een toestel dat bijmiddel van een elektromagneet
informatie kan magnetiseren op de magneetkaart. Deze
schrijver is meestal voorzien een seriële RS232 –of USB verbinding, en wordt aangesloten op
een PC waarop de nodige sturingssoftware draait om de magneetkaartschrijver aan te sturen
– Figuur 8.
Er bestaan 2 types magneetstrips:
- Hoge coërcitie
- Lage coërcitie
Magneetstrippen uit materiaal met hoge coërcitie zijn
moeilijker te wissen, en hierdoor geschikt voor
kaarten die veelvuldig gebruikt worden of waarvan
een lange levensduur wordt geëist.
Magneetstrippen uit materiaal met lage coërcitie
vereisen minder magnetische energie om
beschreven (gemagnetiseerd) te worden dan
magneetstrippen bestaande uit materiaal met een hoge Figuur 9 Magneetkaartlezer
6
coërcitie. Het gevolg hiervan is dat magneetkaartschrijvers die magneetstrippen kunnen
beschrijven met lage coërcitie goedkoper zijn dan magneetkaartschrijvers die in staat zijn
magneetstrippen te beschrijven met een hoge coërcitie.
Deze informatie op de magneetkaartstrip kan worden gelezen bijmiddel van een
magneetkaartlezer. Deze magneetkaartlezer staat in verbinding met een sturing die op haar
beurt, indien toelating verleend wordt, een elektromechanische deurvergrendeling (e.g. een
elektrische sluitplaat) zal aansturen –Figuur 9. Een magneetkaartlezer kan zowel
magneetstrippen met hoge coërcitie lezen als magneetstrippen met lage coëricitie.
De magneetkaart is gestandardiseerd door een aantal International Standard Organisation
(ISO) normen, namelijk de ISO 7810, ISO 7811, ISO 7812, ISO 7813, en de ISO 4909. Deze
normenreeks definieert o.a.:
- De dimensies van de magneetkaart
- De positie en dimensies van de magneetstrip
- De magnetische eigenschappen van de magneetkaart
- Specifieke standaarden voor financiële kaarten
-…
5. Smart Card
Een Smart Card is een kunststofkaart waarin zich
een chip (alleen geheugen met eventueel wat
beveiligingslogica of een microprocessor met
geheugen) bevindt. Deze chip is verbonden met
een gouden contactplaat, ingeval het om een
contact Smart Card handelt – Figuur 10.
Een contact Smart Card werkt niet op batterijen
maar gebruikt de elektrische energie komende van
de elektroden - connectoren van de “lezer”, waarin
de contact Smart Card wordt geschoven. Via de
connectoren kan de lezer informatie lezen van de
Figuur 10 Contact Smart Card
contact Smart Card chip en informatie wegschrijven
op de contact Smart Card chip.
De contact Smart Card lezer/schrijver is het medium tussen de “host” en de Smart Card –
Figuur 11. Deze “host” kan bij toegangscontrole een computer of een controle eenheid zijn
die bij toelating een elektromechanische vergrendeling (e.g. elektrische sluitplaat, solenoïde
slot, elektromechanisch deurbeslag,…) zal gaan aansturen.
7
De contact Smart Card is gestandardiseerd door
de normen ISO/IEC 7816 and ISO/IEC 7810.
Deze normenseries definiëren o.a.:
- De dimensies van de Smart Card
- De positie en vorm van de electrodes van de
gouden contactplaat
- De elektrische/elektronische karakteristieken
- De communicatieprotocollen
- Het formaat van de commando’s verzonden
naar de Smart Card en het formaat van de
teruggestuurde instructies van de Smart Card
- De robuustheid van de Smart Card
-…
Figuur 11 Contact Smart Card lezer/schrijver
geïntegreerd in elektromechanisch deurbeslag
5.1 De contactloze Smart Card – RFID
Een contactloze Smart Card is een Smart Card waarvan de chip kan communiceren
met de Smart Card lezer met behulp van RFID-technologie, dus contactloos. Hiervoor
moet de Smart Card enkel in de nabijheid van de Smart Card lezer gebracht worden.
Eigenlijk is een contactloze Smart Card een “passieve” (werkt zonder batterijen)
RFID-transponder -of Tag, zie punt 6 “RFID”.
De contactloze Smart Card is gestandardiseerd door de norm ISO/IEC 14443.
6. RFID
Figuur 12 RFID-systeem
8
RFID staat voor Radio Frequency Identification. RFID is een automatische
identificatiemethode, waarbij gebruik wordt gemaakt van elektromagnetische golven op
radiogolffrequentie, om gegevens (data) contactloos te lezen of te schrijven op een
informatiedrager. Deze informatiedrager wordt meestal een RFID-tag –of transponder
genoemd.
De elektromagnetische golven waarvan gebruik wordt gemaakt zijn meestal wisselende
magnetische velden (meestal toegepast bij toegangscontrole) waarbij gebruik wordt gemaakt
van de inductieve koppeling tussen twee spoelen, men spreekt dan van RFID-systemen met
inductieve koppeling. Daarom zijn al de RFID-systemem die in deze publicatie aangehaald
worden inductief gekoppelde systemen, met de bedoeling overzichtelijk te kunnen blijven.
Er bestaan ook systemen die gebruik maken van propagerende elektromagnetische golven,
men spreekt dan van propageerkoppeling (propagation coupling).
Ten slotte bestaan er ook systemen die gebruik maken van wisselende elektrische velden,
men spreekt dan van RFID-systemen met elektrische koppeling.
Een RFID-systeem – Figuur 12 - bestaat altijd uit 2 componenten:
-
De transponder of tag
-
De RFID-lezer welke een lees en/of een lees-schrijf toestel kan zijn
De RFID-lezer bestaat uit een radiofrequentiemodule (zender en ontvanger), een controle
eenheid en meestal een spoel die dienst doet als antenne en (inductief)koppelingselement
met de transponder. Vele RFID lezers zijn uitgerust met een seriële interface (RS232 of
RS485) waardoor het mogelijk is de data, komende van de transponder of tag, te sturen naar
een externe host. Bij toegangscontrole kan dit een PC zijn met toegangscontrolesoftware of
een toegangscontrolesturing die op haar beurt een elektromechanische vergrendeling
(elektrische sluitplaat, motorcilinder, motorslot, …) kan gaan aansturen.
Figuur 13 Voorbeelden van RFID transponders of tags
9
De transponder of tag is de informatiedrager van het RFID-systeem. De tag of transponder
bevat meestal een spoelantenne en een Silicium chip en optioneel een batterij (ingeval het
een actieve transponder betreft) - Figuur 13.
6.1 RFID met passieve transponder
Figuur 14 De Passieve transponder met inductieve koppeling
Een Passieve transponder is een informatiedrager die niet kan instaan voor zijn eigen
energievoorziening en heeft dus geen batterij. De energie die nodig is om de chip op
de transponder te voeden is afkomstig van de RFID-lezer. Om die reden zendt de
spoelantenne van de RFID-lezer een wisselend elektromagnetisch veld uit op
radiogolffrequentie.
Een klein deel van dit uitgezonden veld penetreert de spoelantenne van de passieve
transponder, die zich op een bepaalde afstand bevindt van de RFID-lezer – Figuur
14. Hierdoor zal in de spoelantenne van de transponder een wisselspanning worden
geïnduceerd. Deze wisselspanning zal worden gelijkgericht en dienen als
voedingspanning voor de chip (de eigenlijke gegevensdrager).
De capaciteit C1 (Figuur 14) vormt samen met de spoelantenne een resonantiekring
die zodanig gedimensioneerd is dat de resonantiefrequentie overeenkomt met de
frequentie van het magnetisch veld uitgezonden door de RFID-lezer. Hierdoor zal de
geïnduceerde voedingspanning haar maximale waarde bereiken bij de frequentie van
het magnetische veld van de RFID-lezer en wordt een voldoende hoge
voedingspanning verzekerd voor de werking van de chip. Bij resonantiefrequentie zijn
de opgewekte stromen in de spoelantenne hoog. Deze hoge stromen kunnen
gebruikt worden door de transponder om een voldoende sterk magnetisch veld te
genereren dat gedetecteerd kan worden door de RFID-lezer, zodat de gegevens op
de transponder kunnen overgedragen worden naar de RFID-lezer. Bijkomend wordt
de frequentie van de geïnduceerde wisselspanning in de spoelantenne van de
10
transponder bij resonantiefrequentie gebruikt als kloksignaal voor de chip op/in de
transponder.
De resonantiefrequentie f waarmee wordt gewerkt heeft een belangrijke invloed op de
dimensies van de spoelantenne van de transponder. Als de resonantiefrequentie f
toeneemt neemt de minimum vereiste spoelantenne inductantie van de transponder
af. Dit wil zeggen dat het minimum aantal vereiste windingen van de spoelantenne
van de transponder zal afnemen, en dus de passieve transponder kleiner kan
worden. Bijvoorbeeld een RFID-systeem op 135 kHz vereist 100 tot 1000 windingen
op de passieve transponder, maar een RFID-systeem op 13,56 MHz vereist slechts 3
tot 10 windingen op de passieve transponder.
6.2 RFID met actieve transponder
Een actieve transponder bevat naast een chip en spoelantenne ook een eigen
energiebron in de vorm van een batterij. Door de eigen energiebron is de transponder
in staat om een zwakker radiosignaal te ontvangen en het antwoord uit te zenden
over een grotere afstand (afstanden tot 15 m). Hier staat tegenover dat de levensduur
door de batterij beperkt is en de actieve transponder over het algemeen groter en
tevens duurder is.
6.3 RFID met semi-passieve transponder
Een semi-passieve transponder heeft een eigen batterij welke niet wordt gebruikt om
de leesafstand te vergroten maar om de intelligentie en de geheugenopslagcapaciteit
van de chip te verbeteren.
6.4 RFID toepassingsvoorbeelden
6.4.1 RFID wandlezer (passief)
RFID met passieve transponders wordt bijvoorbeeld toegepast bij
toegangscontrole voor zowel buiten –als binnendeuren. Hierbij wordt meestal
een RFID-lezer in of op de wand naast het deurkader aangebracht. Men
spreekt dan van RFID-wandlezers met passieve transponders. Er zijn
verschillende types wandlezers op de markt.
Zo zijn er wandlezers met een geïntegreerde controle eenheid. Deze
wandlezers kunnen niet alleen de informatie op de passieve transponder
lezen maar bezitten de nodige elektronica om na te gaan of de bezoeker
toegelaten is en om de nodige signalen uit te sturen naar de
11
elektromechanische vergrendeling zoals een elektrische sluitplaat of een
sturing van een motorcilinder enz…
Daarnaast zijn er wandlezers op de markt waarvan de controle eenheid in
een andere behuizing is aangebracht zodat de controle eenheid op een
veiligere plaats in de buurt van de deur kan worden aangebracht. Hierdoor is
het moeilijker het toegangscontrolesysteem te saboteren door de wandlezer
zelf aan te vallen.
In figuur 15 wordt een voorbeeld getoond van een RFID-wandlezer met
passieve transponder welke wordt gebruikt om een elektrische sluitplaat aan
te sturen ingeval de passieve transponder wordt toegelaten. De RFIDwandlezer heeft een geïntegreerde controle eenheid en is een offline RFIDlezer. Dit wil zeggen dat de RFID-wandlezer draadloos wordt
geprogrammeerd via een PDA, in dit geval met infraroodverbinding. Bij deze
toepassing is de lezerreikwijdte +/- 10 cm.
Figuur 15 Toepassingsvoorbeeld van een offline RFID-wandlezer met
geïntegreerde controle eenheid en met passieve transponder
12
6.4.2. RFID wandlezer (actief)
Een RFID-wandlezer
met actieve
transponders is
soortgelijk aan de
RFID-wandlezer met
passieve transponder,
echter met dit verschil
dat er met actieve
transponders wordt
gewerkt. Het voordeel
hiervan is dat het
leesbereik van de
RFID-wandlezer
groter wordt tot +/- 15
Figuur 16 RFID-wandlezer met actie transponder
m. Daar tegenover
staat dat de
transponder een batterij bevat (duurder) en deze tijdig vervangen dient te
worden. In figuur 15 wordt een toepassing getoond met RFID-wandlezer met
actieve-transponder. In dit geval bedraagt het maximale leesbereik 7 meter.
6.4.3 Mechatronische cilinder met geïntegreerde RFIDlezer
RFID-technologie kan
worden geïntegreerd in
europrofiel cilinders.
Deze cilinders staan
bekend als de
mechatronische of
elektronische cilinder.
Een voorbeeld hiervan
is de elektronische of
mechatronische
Figuur 17 Elektronische knopcilinder
knopcilinder – Figuur
17. Hierbij is in één van
de knoppen een RFID-lezer geïntegreerd. Ingeval de RFID-transponder
13
gelezen wordt door de RFID-lezer in één van de knoppen en herkend, dan
wordt de bediening van de cilinder bij middel van de knoppen
elektromechanisch vrijgegeven.
Mechatronische knopcilinders werken meestal met passieve transponders.
6.5 Toekomstige ontwikkelingen
Op dit ogenblik worden wereldwijd RFID transponders ontwikkeld gebaseerd op
polymeren halfgeleiders (organische elektronica).
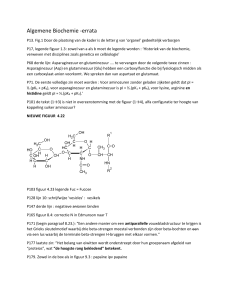
In de jaren ’70 van de vorige eeuw is reeds ontdekt dat polymeren zich kunnen
gedragen als halfgeleiders. Polymere halfgeleiders scoren veel beter qua
plooibaarheid, gewicht en vooral in prijs vergeleken met hun anorganische collega’s
zoals de Silicium halfgeleiders. De lage prijs houdt niet enkel verband met de lagere
materiaalkost, maar ook met het productieproces van polymere halfgeleiders.
Polymere halfgeleidermateriaal vereist geen dure en ingewikkelde processen die
moeten worden uitgevoerd bij hoge temperatuur en in een gecontroleerde omgeving
(clean room).
Er zijn al polymere RFID-tags gedemonstreerd, in labo omstandigheden, werkende
op een frequentie 13,52 MHz in 2005 door o.a. Philips (Nederland) – Figuur 18 .
Figuur 18 experimentele organische RFID tag 13.52 MHz – Phillips
Polymere RFID transponders zullen veel goedkoper zijn dan de huidige Silicium
gebaseerde RFID transponders. De prijzen zullen vergelijkbaar worden met die van
de huidige barcode.
14
7. Biometrie
Biometrie is een techniek voor het
herkennen en identificeren van
personen. Hierbij wordt gebruik
gemaakt van lichaamskenmerken
en / of specifieke psychologische
Figuur 19 Biometrische techniek in combinatie met
een “gewone” identificatiemethode
karakteristieken en gedragingen.
Zo kan op basis van bijvoorbeeld
vingerafdrukken, gezichtvorm, patronen in de iris, handschrift, warmtepatronen in het gelaat
of het stempatroon iemand worden geïdentificeerd.
Biometrische identificatie kan worden gebruikt om ongeautoriseerde toegang tot bijvoorbeeld
gebouwen, machines, pc of netwerken te voorkomen. Het gebruik van biometrische
identificatie is aanzienlijk betrouwbaarder en minder fraudegevoelig dan het gebruik van
toegangscodes, pincodes of smartcards. De lichaamskenmerken identificeren immers de
persoon zelf en zijn niet overdraagbaar of vervreemdbaar.
Vaak zal een biometrische techniek
toegepast worden in combinatie met
een “gewone” identificatiemethode als
een magneetkaart, een code, RFIDtransponder of een handtekening –
Figuur 19.
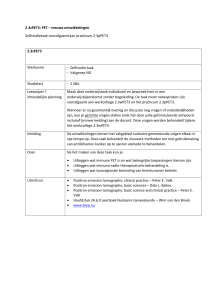
De prestaties van een biometrisch
systeem, zoals een
vingerafdrukscanner of een
Figuur 20 De prestatieparameters FAR, FRR en
EER
irisscanner, wordt meestal uitgedrukt
in termen van “false accept rate”
(FAR), “false non match”- of “false reject rate” (FRR), en “failure to enroll rate” (FTE of FER) –
Figuur 20.
De “false acceptance rate” (FAR) vertegenwoordigt, in procenten, het aantal niet toegelaten
gebruikers die onterecht door het biometrische systeem aanvaard zijn als toegelaten
gebruikers.
De “false reject rate” vertegenwoordigt, in procenten, het aantal toegelaten gebruikers die
door het biometrische systeem onterecht geïdentificeerd werden als niet-toegelaten
15
gebruikers.
De “faillure to enroll rate” (FTE of FER) vertegenwoordigt in procenten, het aantal mislukte
pogingen van het biometrische systeem om een goede “enrollment” template (of referentie
template) aan te maken en te bewaren van de eindgebruiker.
“Enrollment” is het proces waarbij biometrische monsters (e.g. vingerafdruk) van een persoon
worden verzameld, door het biometrische systeem, gevolgd door de voorbereiding, aanmaak
en bewaring van een “referentie template”. Deze “referentie template” vertegenwoordigt de
identiteit van de persoon, en zal worden gebruikt voor toekomstig vergelijk met de
aangemelde template van deze persoon om te kunnen vaststellen of het om een toegelaten
of niet toegelaten persoon gaat.
In de praktijk kunnen de FAR en FRR tegenover elkaar ingesteld worden door een bepaalde
parameter van het biometrische systeem te wijzigen. Meestal wordt het biometrische systeem
zodanig ingesteld dat de FAR gelijk is aan de FRR. Deze waarde wordt de “equal error rate”
(EER) ofwel de “cross-over error rate” (CER) genoemd. Hoe lager de EER of CER hoe
nauwkeuriger het biometrische systeem – Figuur 20.
7.1 Vingerafdrukken
De meest gebruikelijke en geleidelijk betaalbare
toepassing van biometrie in de toegangscontrole
is het meten van de vingerafdruk.
De vingerafdruk van een persoon is uniek
verbonden aan deze persoon en wordt gevormd
Figuur 21 Vingerafdruk
door het patroon van kleine rimpels en valleien op
het vingeroppervlak – Figuur 21. Door dit unieke patroon te identificeren beschikt
men over een middel waardoor men de persoon in kwestie betrouwbaar kan
identificeren.
Bij het gebruik van vingerafdrukken voor identificatie, voor o.a. toepassing bij
toegangscontrole, baseert men zich op 2 fundamentele principes:
¾
Onveranderlijkheid: Het patroon van rimpels en valleien van een vingerafdruk
blijven onveranderd gedurende het ganse leven van een individu (tenzij bij
verminking of bepaalde huidziekten).
¾
Uniekheid: Iemands vingerafdruk is uniek, zelfs als het om identieke
tweelingen gaat.
16
Bij de analyse van een ingelezen
vingerafdruk wordt de gehele
vinger niet vergeleken met
volledige vingerafdrukken die in
een bestaande databank zijn
opgeslagen. Dit is trouwens geen
efficiënte methode. Want door de
Figuur 22 Minutiae
volledige vingerafdruk te
vergelijken met opgeslagen volledige vingerafdrukken is de kans groter dat
voldoende vingerafdrukinformatie gestolen kan worden om de vingerafdruk te
reconstrueren voor misbruik, en zulk een methode vereist te veel processorcapaciteit.
In plaats daarvan zal men bepaalde kenmerken van de vingerafdruk gaan
vergelijken. Deze kenmerken worden algemeen “minutiae” genaamd. Er bestaan
verschillende types “minutiae” – Figuur 22:
¾
Rimpeleinde: Een abrupt eindigende rimpel
¾
Spoor: Een vertakking waarbij een korte rimpel vertakt van een langere
rimpel
¾
Vertakking (Bifurcation): Een enkele rimpel die vertakt in 2 rimpels
¾
Meer of omsluiting: Een enkele rimpel die vertakt in twee rimpels en kort
daarna weer terug samenkomt tot één rimpel.
¾
Korte rimpel: Een rimpel die begint en kort daarna weer eindigt
¾
Overstap: Een korte rimpel die loopt tussen twee parallelle rimpels
Sommige vingerafdrukexperts nemen aan dat er slechts twee hoofdcategorieën van
“minutiae” bestaan: rimpeleindes en rimpelvertakkingen. Terwijl alle andere
categorieën van deze twee hoofdcategorieën kunnen worden afgeleid.
De systeemsoftware van de vingerafdrukscanner maakt gebruik van relatief
complexe algoritmen om deze minutiae te herkennen en te analyseren. Het idee
hierachter is om de relatieve posities van deze minutiae te meten t.o.v. elkaar. Indien
twee vingerafdrukken (ingelezen en opgeslagen vingerafdruk) dezelfde minutiae
bevatten met dezelfde relatieve posities, dan is er sprake van een hoge
waarschijnlijkheid dat de vingerafdrukken van dezelfde persoon afkomstig zijn.
Om een positieve identificatie te verkrijgen is het niet nodig om alle minutiae van de
vingerafdruk te vinden en te analyseren. De vingerafdrukscanner moet voldoende
minutiae vinden die de ingelezen en de opgeslagen vingerafdruk gemeen hebben.
17
Hoeveel minitiae dat precies zijn hangt af van de systeemsoftware van de scanner.
Een typische vingerafdrukscanner kan tot 40 minutiae identificeren en analyseren.
Enkel de gegevens die de minutiae bevatten en hun posities worden bewaard in een
“template”, en niet de volledige vingerafdruk. Hierdoor is het onmogelijk om een
volledige vingerafdruk te reconstrueren op basis van de gegevens in de “template” en
blijven de bestanden beperkt in grootte.
7.1.1 Optische vingerafdrukscanner
Het hart van de optische vingerafdrukscanner is de lichtgevoelige sensor.
Deze lichtgevoelige sensor kan het binnenvallende licht vertalen naar een
digitaal signaal. Zo een sensor is opgebouwd uit lichtgevoelige diodes, ook
wel "photosites" genoemd. Hoe meer licht er op een lichtgevoelige diode valt
hoe groter de lading is die zich opbouwt bij de lichtdiode. Er zitten miljoenen
diodes op een sensor. Elke diode op de sensor bepaalt de kleur van 1 pixel in
de foto. Hoe meer diodes op de sensor, hoe meer pixels de foto zal bevatten.
Of met andere woorden: hoe hoger de resolutie is.
Er zijn twee types lichtgevoelige sensoren die worden toegepast:
Complimentary Metal-Oxide Semiconductor (CMOS) en Charge-Coupled
Device (CCD) sensoren. De overeenkomst tussen de sensoren is dat ze
beide lichtgevoelige diodes bevatten die licht opvangen en omzetten in
elektrische spanning.
De CCD sensor is de meeste gebruikte
sensor in optische vingerafdrukscanners
– Figuur 23. In een CCD sensor wordt de
opgebouwde spanning (analoge waarde)
van een diode getransporteerd over de
chip en aan de rand afgelezen. Elders in
Figuur 23 CCD sensor
de scanner worden de
spanningswaarden omgezet in een digitaal signaal door een analoog naar
digitaal converter. CCD sensoren leveren van zichzelf een goed ruisloos
beeldsignaal met een goede lichtuniformiteit (gelijke lichtsterkte in het hele
plaatje). De productiekosten van CCD sensoren ligt flink hoger dan die van
CMOS sensoren.
18
Bij de CMOS sensor is de technologie
voor het uitlezen en omzetten van de
analoge spanningswaarden in digitale
waarden geïntegreerd in de sensor –
Figuur 24. Elke lichtgevoelige diode op
een CMOS sensor wordt apart
Figuur 22 CMOS
sensor
Figuur 24 CMOS sensor
uitgelezen en de waarde wordt direct
omgezet in een digitale waarde. CMOS
sensoren geven dus direct een digitaal
signaal af waardoor er minder elektronica nodig is in de rest van de
vingerafdrukscanner. Bovendien gebruiken CMOS sensoren minder energie
dan CCD sensoren.
CMOS chips hebben ook nadelen. Ze zijn gevoeliger voor ruis (storing) dan
CCD sensoren. Tegenwoordig wordt de ruis door sommige fabrikanten
opgeheven door ruisonderdrukkende technologie die “active pixel sensor”
wordt genoemd. De sensorchip berekent een tegenruis die het originele
ruissignaal opheft. Dit heeft een grote kwaliteitsverbetering tot gevolg. Deze
ruisonderdrukkende technologie zorgt er echter weer voor dat CMOS
sensoren minder lichtgevoelig zijn, omdat een deel van de sensoroppervlakte
opgeofferd wordt aan de ruisonderdrukkende elektronica. Ook dit probleem is
aangepakt: door licht in de lichtgevoelige diodes te laten convergeren
(samenkomen). Dit levert een grotere lichtsterkte op het punt waar de
lichtstraal 'neerkomt'.
De meeste optische vingerafdrukscanners zijn zoals gezegd uitgerust met
een CCD sensor. Of dit zo blijft valt te bezien. De productiekosten van CMOS
chips zijn aanzienlijk lager en dat maakt ze interessant voor producenten van
optische scanners.
7.1.2 Capacitieve scanner
Capacitieve vingerafdrukscanners
zijn voorzien van een capacitieve
sensor – Figuur 25. In plaats van
gebruik te maken van invallend
licht, wordt een beeld gemaakt van
Figuur 25 Capacitieve sensor
het rimpel- en valleipatroon van de
vingerafdruk bijmiddel van veranderende potentialen door het detecteren van
variërende capacitieten.
19
In figuur 26 wordt een principieel schema getoond van een capacitieve
sensor. De sensor bestaat uit één of meerdere halfgeleiderchips die elk een
matrix van minuscule cellen bevatten.
Figuur 26 Principe schema van een capacitieve sensor
Deze cellen zijn kleiner of smaller dan een rimpel op een vinger (ongeveer 50
µm). Iedere cel bevat twee geleidende platen. Deze twee elektrische platen
zijn verbonden aan een integrator. Een integrator is een speciale toepassing
van een inverterende operationele versterker. Dit is een operationele
versterker in inverterende mode, waarbij in de terugkoppelkring een
condensator wordt geplaatst – Figuur 27. Het is niet de bedoeling volledig op
de werking van een integrator in te gaan, maar kort gezegd levert deze
versterker een bepaalde uitgangspanning in functie van de aangelegde
ingangspanning aan de inverterende ingang en van de capaciteit van de
condensator in de terugkoppelkring.
Indien we figuur 26 beschouwen, wordt de
niet-inverterende ingang (de ingang met
een +) op nulpotentiaal geplaatst. Aan de
inverterende ingang (de ingang met een -)
wordt een referentiespanning aangelegd.
De twee geleidende platen zijn verwerkt in
Figuur 27 Integrator
een isolerend medium en vormen hierdoor
een condensator, waarbij de twee geleidende platen de 2 condensatorplaten
vormen en het isolerend medium de isolerende tussenlaag. De ene
geleidende plaat is verbonden aan de uitgangsklem van de versterker en de
ander geleidende plaat is verbonden aan de inverterende ingang van de
20
versterker, met andere woorden: de uitgang van de versterker is verbonden
(teruggekoppeld) aan de inverterende ingang via een condensator.
Het oppervlak van de vinger
beïnvloedt de effectieve
capacitiet van de
terugkoppelcondensator. Zo
zal capaciteit van een
terugkoppelcondensator
onder een rimpel kleiner zijn
dan de capaciteit van een
Figuur 28 Sferische elektrische velden bij
de capacitieve sensor
terugkoppelcondensator
onder een vallei. Dit komt
omdat de geladen terugkoppelcondensator een sferische elektrisch veld
veroorzaakt tussen de twee geleidende platen. Een rimpel van de buitenhuid
(de dode huidlaag) zal sterker interfereren met de sferische veldlijnen van dit
elektrische veld dan een vallei van de buitenhuid daar een vallei zich op een
grotere afstand van de geleidende platen bevindt – Figuur 28
Bekijken we nu wederom figuur 26. Om het rimpel- en valleipatroon in te
scannen zal de processor van de scanner eerst de reset schakelaars sluiten
zodat al de terugkoppelcondensators wordt kortgesloten en kunnen ontladen.
Op deze wijze worden de integrator circuits uitgebalanceerd. Daarna worden
de reset schakelaars geopend en processor zal een vaste lading plaatsen op
het integrator circuit via de ingang -referentiespanning, en de
terugkoppelcondensators zullen opladen. Daar deze condensators de
uitgangsklem terugkoppelen naar de inverterende ingang, wordt hierdoor de
ingangspanning beïnvloedt en op haar beurt wederom de uitgangspanning.
Aangezien de afstand tussen buitenvingeroppervlak en de geleidende platen
de capaciteit van de terugkoppelcondensator beïnvloeden zal een rimpel een
andere uitgangspanning veroorzaken dan een vallei.
De processor van de vingerafdrukscanner leest deze verschillende
uitgangspanningen aan iedere cel uit en plaatst al deze waarden samen. Op
deze manier kan de processor een beeld opstellen van de vingerafdruk.
Het hoofdvoordeel van de capacitieve vingerafdrukscanner is dat deze
scanner een echt vingerafdrukreliëf vereist, in tegenstelling tot de optische
scanners die gebruik maken van een gemeten verdeling van licht- en
donkerwaarden. Hierdoor is de capacitieve vingerafdrukscanner minder
21
fraudegevoelig dan de optische vingerafdrukscanner. Daarenboven is de
capacitieve sensor compacter dan een CCD-sensor, waardoor capacitieve
vingerafdrukscanners meestal compacter zijn dan de optische scanners.
Maar deze scanner, net als bij de optische scanners, werkt niet altijd goed bij
alle vingertypen. Daar de capacitieve scanner beïnvloed wordt door de
luchtlaag tussen het buitenvingeroppervlak (de dode huidlaag) en de
isolerende tussenlaag op de chip, zullen vuilere handen (b.v. in een
werkplaats) of vel dat vereelt is (b.v. bij oudere personen of ingeval van een
huidaandoening) zorgen voor problemen daar het moeilijker wordt voor de
scanner om een nauwkeurig beeld van de vingerafdruk te nemen.
Eind jaren ’90 van de vorige eeuw (1998) is een vingerafdrukscanner
ontwikkeld die quasi niet meer beïnvloed wordt door bovengenoemde
beperkingen, en dus quasi elk vingertype correct kan inlezen. Dit type
vingerafdrukscanner is gebaseerd op RF-technologie (Radio Frequency).
Deze technologie is gepatenteerd onder de naam “TruePrint” technologie en
is eigendom van het bedrijf Authentec ( www.authentec.com ). Dit type
vingerafdrukscanner wordt RF vingerafdrukscanner genoemd – zie punt 7.1.3
7.1.3 RF vingerafdrukscanner
Figuur 29 Principe van de RF-vingerafdrukscanner (TruePrint – Authentec)
De RF vingerafdrukscanners maakt gebruik van een uniform “lineair” elektrisch veld
dat men gaat opwekken tussen de hooggeleidende levende huidlaag, net onder de
dode huidlaag, en een elektrische geleidende vlakke laag in de RF-sensorchip. Men
laat dit coherente lineaire elektrische veld wisselen op radiogolffrequentie (RF) –
Figuur 29. Figuur 30 toont een foto van zo een RF-vingerafdruksensorchip.
Deze technologie is in 1998 ontwikkeld door een biometrisch bedrijf Authentec
genaamd, en is gepatenteerd onder de naam TruePrint technologie.
22
TruePrint technologie is gebaseerd op het principe
dat de elektrische equipotentialen (oppervlakken van
gelijke potentiaal in een potentiaalveld) de vorm
zullen aannemen van de nabij gelegen geleidende
oppervlakken. Wanneer men b.v. een lineair
elektrisch veld opwekt tussen twee vlakke geleidende
oppervlakken, dan zullen de elektrische veldlijnen
Figuur 30 RFvingerafdruksensor
tussen deze twee oppervlakken recht blijven
(parrallel). Maar als één of beide van de geleidende
oppervlakken gekromd worden (dus niet meer vlak) dan zullen de veldlijnen afbuigen
in functie van de vorm van de geleidende oppervlakken. Daar de equipotentialen de
elektrische veldlijnen loodrecht snijden, zullen deze de vorm gaan aannemen van de
nabije geleidende oppervlakken. Dit kan men goed geïllustreerd zien in figuur 29. De
elektrische equipotentiaallijnen snijden de elektrische veldlijnen loodrecht en nemen
bijgevolg de vorm aan van de geleidende levende huidlaag.
In de praktijk wordt bij de RF vingerafdrukscanner een wisselend lineair elektrisch
veld opgewekt tussen een geleidende laag binnenin een silicium chip en de elektrisch
geleidende huidlaag die zich juist onder het buitenoppervlak bevindt van de
vingerhuid. Doordat de veldlijnen meebuigen met het levende huidoppervlak zullen
elektrische equitpotentialen de vorm aannemen van de levende huidlaag. Juist onder
het oppervlak van de silicium chip en boven de geleidende vlakke laag in de chip
bevinden zich minuscule pixel sensorplaatjes, zie figuur 29. Deze sensorplaatjes
vormen een matrix van antennetjes die elektrische potentiaal contouren
(equipotentiaallijnen) kunnen meten, daar het RF elektrische veld elektrische
potentialen induceert in de sensorplaatjes (zoals bij een radio antenne). Deze
potentialen worden dan door versterkers omgezet in spanningswaarden die het beeld
van de vingerafdruk vertegenwoordigen.
De vingerafdruk die afgeleid
wordt door de vingerafdruksensor
is dus niet afhankelijk van de
luchtopening tussen
vingeroppervlak en
sensoroppervlak, zoals bij een
capacitieve vingerafdruksensor.
Als gevolg hiervan kunnen ook
vingerafdrukken gemeten worden
Figuur 31 Toegangscontrole met een RFvingerafdrukscanner
waarbij op de huid zich eelt
gevormd heeft of indien het
23
vingeroppervlak vuil is of droog. Bij capacitieve en optische scanners kunnen zulke
vingeroppervlakken voor problemen zorgen.
Doordat er met een RF
elektrisch veld wordt gewerkt
kan de sensor in een dikker
beschermende coating
geplaatst worden zonder de
gevoeligheid van de RF
sensor nadelig te
beïnvloeden. Hierdoor is de
Figuur 32 Toegangscontrole met een RFvingerafdrukscanner gecombineerd met een
codeklavier
RF vingerafdrukscanner
mechanisch robuuster en
minder gevoelig aan
elektrostatische ontladingen dan de capacitieve en optische vingerafdrukscanners.
In figuren 31 en 32 worden een paar toepassingsvoorbeelden getoond van
biometrische toegangscontrole op basis van een RF-vigerafdrukscanner. Figuur 31
illustreert een toegangscontrole met enkel vingerafdrukcontrole en figuur 32 toont een
“stand alone” toegangscontrole eenheid waarbij RF-vingerafdrukcontrole
gecombineerd wordt met een codeklavier.
7.1.4 Thermische vingerafdruksensor
De thermische vingerafdruksensor
maak gebruik pyro-elektrisch
materiaal, zoals bij de passieve
infrarood detectoren (PIR). Pyroelektrisch materiaal zet
Figuur 33 Thermische
vingerafdruksensor – Atmel FingerChip
temperatuursverschillen om in een
overeenkomstig (analoog) elektrisch
signaal.
De thermische vingerafdruksensor maakt
gebruik van een matrix van
(temperatuursgevoelige) pyro-elektrische
pixels.
Het principe hierachter is dat wanneer de
Figuur 34
rimpels van de vingerafdruk contact maken
24
met de pyro-elektrische pixels er een tijdelijk temperatuursverschil aanwezig zal zijn
tussen de rimpel en de pixel. Dit veroorzaakt een tijdelijk elektrische lading op het
oppervlak van de pyro-elektrische pixel. Bij pixels die zich onder een vallei bevinden
is dit tijdelijke temperatuursverschil niet aanwezig.
Het is echter wel zo dat het elektrische potentiaal veroorzaakt door een pixel onder
een rimpel slechts heel kort is (minder dan een duizendste van een seconde), omdat
zich snel een thermisch evenwicht vormt tussen pixel en rimpel.
Om dit euvel op te vangen, en aldus toch de ‘gehele’ vingerafdruk te kunnen
scannen, werd deze sensor ontwikkeld als een sensor waarover men het
vingeroppervlak moet laten glijden met een gepaste glijsnelheid. De vingerafdruk
wordt dan stuk voor stuk (frame per frame) ingelezen en vervolgens door de scanner
software aan mekaar gehecht tot één vingerafdruk – Figuur 34.
Het nadeel is dat het wat langer zal duren om een volledig beeld van de vingerafdruk
te genereren.
Het gevolg is dat de sensor chip veel smaller is dan b.v. een optische of capacitaire
sensor. Dit levert ook voordelen op:
- Het kleinere chipoppervlak zal de eenheidsprijs van de sensor beperken (minder
silicium).
- Doordat er over de sensor gegleden moet worden is de sensor zelfreinigend en
blijft er geen latente vingerafdruk achter op de sensor. Deze latente afdruk kan
problemen veroorzaken bij het inlezen van een daaropvolgende vingerafdruk en
kan soms een bruikbare afdruk zijn om gekopieerd te worden door personen met
criminele bedoelingen.
- Doordat gebuik wordt gemaakt van pyro-elektrisch materiaal, is deze sensor weinig
of niet gevoelig aan elektrostatische ontladingen (b.v. wanneer het vingeroppervlak
contact maakt met de sensor), zoals dit het geval is bij de capacitieve sensor.
Ondanks deze voordelen wordt deze sensor voorlopig alleen ontwikkeld door de
producent Atmel onder de naam ‘FingerChip’ – Figuur 33.
De FingerChip bevat naast de sensor array met pyro-elektrische pixels de nodige
elektronica om de analoge waarden in digitale waarden om te zetten.
25
De FingerChip bevat een matrix (pyro-elektrische pixels) van 8 rijen bij 280
kolommen. De sensor bevat evenwel nog een 281-ste kolom van pixels met 8 rijen.
Dit is echter een dummy-rij verbonden met een temperatuursensor. Deze dummy
wordt gebruikt voor de kalibratie van de sensor en de identificatie van een frame. Dit
geeft een totaal van 2240 temperatuursgevoelige pixels. 1 pixel is 50 bij 50 µm. Dit
geeft in totaal en resolutie van 500 dpi over een beeldoppervlak van 0.4 bij 14 mm.
Dit is een voldoende hoge resolutie om een werkbaar frame (een deel van de totale
afbeelding van de vingerafdruk) in te scannen. Deze resolutie voldoet b.v. aan de
eisen van de IQS (Image Quality Specifivation) van het IAFS (Integrated Automated
Fingerprint identification System) van het FBI (U.S. Ferderal Bureau of Investigation).
De FingerChip kan werken tot een kloksnelheid van 2 MHz, hetgeen resulteert in het
genereren 1780 frames per seconde. Dit is voldoende voor een typisch glijsnelheid
van het vingeroppervlak over de sensor.
De FingerChip sensor zelf, samen met de elektronica om de analoge waarden om te
zetten in digitale waarden, bevinden zich in dezelfde gietvorm van 1.7 bij 17.3 mm.
Het functionele schema in figuur 35 toont de werking van al deze componenten in
deze gietvorm van 1.7 bij 17.3 mm.
Figuur 35 Functioneel schema van de FingerChip
De cyclus van operaties voor het inlezen van één frame gaat als volgt:
-1 van de 208 + 1 kolommen in de sensormatrix wordt geselecteerd. De kolommen
worden sequentieel van links naar rechts geselecteerd. Na het geven van een reset
signaal wordt begonnen met de meest linkse pixel-kolom uit te lezen.
26
-Iedere pixel in de gekozen kolom stuurt zijn analoge temperatuurswaarde naar de 8
versterkers
-Twee lijnen (een even en oneven lijn) per keer (per klokpuls) worden geselecteerd
om hun analoge waarden door te sturen naar de twee 4-bit analoog naar digitaal
converters (4-bit –A/DC).
- De twee 4-bit digitale waarden worden vervolgens parallel uitgelezen aan de
parallelle uitgangen De0-3 en Do0-3.
Per klokpuls worden dus 2 pixels van een kolom uitgelezen. Dit wordt geïllustreerd in
figuur 36 voor 1 frame (dus 280 +1 kolomen van 8 rijen, dit wil zeggen 4 klokpulsen
per kolom).
Figuur 36 Atmel FingerChip kolom sequentie voor één frame
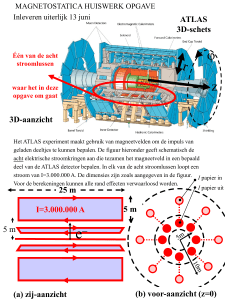
Tot slot wordt in figuur 37 de opeenvolging of sequentie van de frames getoond.
Figuur 37 Atmel FingerChip frame sequentie
7.1.5 MEMS
Micro-Elektro-Mechanical-Systems
(MEMS) kan men definiëren als de
integratie van mechanische elementen,
sensoren, actuatoren en elektronica op
een gemeenschappelijk silicium substraat
gebruikmakend van microfabricatie
technologie.
De (micro)elektronica wordt gefabriceerd
Figuur 38 MEMS, met toestemming van
Sandia National Laboratories,
SUMMiTTM Technologies,
www.mems.sandia.gov
door gebruikmaking van “Integrated circuit”
27
(IC) processtappen (b.v. CMOS, Bipolar of BICMOS processen), terwijl de
micromechanische componenten (op µm schaal) gefabriceerd worden door
gebruikmaking van processen die selectief delen wegetsen van silicium schijven of
nieuwe structurele lagen bijvoegen om mechanische of elektromechanische
onderdelen te vormen.
De micro elektronische “integrated circuits” kan men beschouwen als het brein van
een systeem en MEMS voorzien dit brein van “ogen” (sensoren) en “armen”
(actuatoren), waardoor dit microsysteem in staat wordt gesteld de omgeving te
“voelen” en te “controleren”.
MEMS technologie wordt heden ook toegepast voor het ontwikkelen van
vingerafdruksensoren door gebruik te maken van de drukverdeling onder het
vingeroppervlak.
7.1.5.1 Piëzo resistief
De piëzo-resistieve vingerafdruksensor maakt
gebruik van een dunne
filmsensor pixelmatrix om
de druk te meten onder de
rimpels van de te meten
vingerafdruk.
Figuur 39 Piëzo resistieve sensor
De pixels of cellen zijn van dezelfde grootte als de andere types sensoren, dus 50µm,
hetgeen dezelfde gebruikelijke resolutie van 500 dpi oplevert. Wanneer het
vingeroppervlak op de sensor wordt geplaatst komen alleen de rimpels van het
vingeroppervlak in contact met de drukgevoelige cellen. Als gevolg hiervan
ondergaan zullen enkel de resistieve eigenschappen van de cellen onder de rimpels
veranderen.
Iedere cel bevat een piezo-resistieve MEMS structuur. Een peizo-resistief element
ondergaat een elektrische weerstandsverandering wanneer deze vervormd wordt,
een voorbeeld hiervan zijn rekstrookjes. Wanneer een vingeroppervlak op sensor
geplaatst wordt ondergaan de piezo-eletrische structuren onder de rimpels een
doorbuiging. Hierdoor verandert de elektrische weerstand in desbetreffende
structuren. In principe is de weerstandsverandering een “analoge” waarde, maar het
weerstandsverschil tussen bedrukte en onbelaste toestand is voldoende groot zodat
door gebruik van een gepaste overgangswaarde (treshold) men op een betrouwbare
manier onderscheid kan maken tussen de aanwezigheid of afwezigheid van een
28
rimpel. Het gevolg hiervan is dat de respons van de sensor onmiddellijk digitaal is, er
is geen analoog naar digitaal omzetting nodig – Figuur 39.
Figuur 40 Vergelijk van resultaten van vingerafdrukken tussen de piezoresistieve sensor en de capacitieve sensor
Doordat niet de afstand tussen sensor en vingeroppervlak wordt gemeten, zoals bij
de capacitieve sensor, maar de druk is de sensor minder gevoelig voor nadelige
invloeden komende van een droog of nat vingeroppervlak – Figuur 40.
7.2 Irisherkenning
Irisherkenning is een
biometrische
identificatiemethode
gebaseerd op hoge
resolutie beelden van de
irissen van een individu.
De iris is een zichtbaar
maar goed beschermde
(beschermd door de
Figuur 41 Anatomie van het oog, [1]
cornea) structuur in het
oog – Figuur 41. De iris is tevens een stabiele structuur welke gewoonlijk niet wijzigt
in de tijd (tenzij bij ziekte). Meestal blijft de iris onveranderd na een chirurgische
behandeling van het oog en zelfs blinden kunnen met de iris worden geïdentificeerd
op voorwaarde dat hun ogen irissen bevatten.
De iris is quasi vlak en heeft een fijne textuur. Deze textuur wordt niet genetisch maar
“random” bepaald tijdens de “embrionale” zwangerschap. Zelfs identieke tweelingen
(monozygoten) hebben volledig onafhankelijke en verschillende iristexturen.
Al deze eigenschappen zorgen ervoor dat de iris een zeer geschikt orgaan is voor
biometrische identificatie.
29
Om aan een hoog resolutie beeld te komen worden foto’s gemaakt van één of beide
ogen van het individu met behulp van een (ccd)camera door gebuik te maken zowel
zichtbaar licht als licht in het NIR spectrum (Near Infrared, 700 nm tot 900 nm). Door
gebruik te maken van NIR-licht is het makkelijker om de iris van de foto te isoleren.
Het irisherkenningsysteem
(software) isoleert
vervolgens de iris uit de
foto en zet deze om in een
dimensie “invariante”
voorstelling (een
dimensieloos polair
coördinatensysteem). Dit
wordt gedaan om de
invloed van pupildilatatie te
neutraliseren.
Figuur 42 Foto van een iris met haar iriscode
Hierna wordt door het
irisherkenningsysteem de
irispatronen (putjes,
strepen, gleuven, etc..)
omgezet in een bitpatroon
of ‘iriscode’. Dit bitpatroon
wordt gebruikt om de iris
van een individu eenduidig
te kunnen vergelijken met
Figuur 43 Iriscodes van 2 verschillende irissen
andere iris bitpatronen die b.v. in een databank of op een smartcard opgeslagen
staan.
De algoritmen om irispatronen om te zetten in een bitpatroon zijn voor het eerst
ontwikkeld door professor John Daugman (University of Cambridge, Computer
Laboratory), en deze zijn door hem gepatenteerd in 1994, [3]. Deze algoritmen
maken gebruik van 2D-Gabor wavelets om de inhoud van een irisfoto te coderen in
een bruikbaar bitpatroon [1], [2],[3].
Dit bitpatroon bestaat uit1024 bitparen die de waarden 00, 01, 10 of 11 kunnen
aannemen – Figuren 42 & 43. Dus een irispatroon wordt voorgesteld door een binair
informatiepakketje van 256 bytes. Deze algoritmen vormen de basis van al de huidige
in gebruik zijnde irisherkenningsystemen.
30
De iriscode (een binaire string) van de ingescande iris kan “snel” vergeleken worden
met een andere iriscode door gebruik te maken van de logische “exclusieve or”
(XOR) in parallelle stukjes als één enkele computerinstructie. De logische XOR
detecteert wanneer een bitpaar niet overeenkomt. Dus bij de bitparen 01 of 10 geeft
een XOR operatie het resultaat 1, en bij de bitparen 11 of 00 het resultaat 0.
Standaard programmeertalen voorzien de mogelijkheid om bij een 32-bit processor
eenheid 2 binaire strings van 32 bit bits te vergelijken met een XOR en het resultaat
te stoppen in een 3-de 32bit string, dit alles in parallel en in één enkele operatie.
Hierdoor kunnen 2 iriscodes ( binaire strings van 2048 bits) met elkaar vergeleken
worden op +/- 1/100000-ste van een seconde op een 300 MHZ desktop PC.
Figuur 44 Irisscanners die gebruiken van de algoritmen van J. Daugman
H
Het aantal keer dat er 1 bits voorkomen in de XOR resultaatstring is een maat voor
het verschil tussen de iriscodes (Hamming distance of HD). De HD wordt vergeleken
met een vooraf statistisch bepaalde waarde om te onderscheiden of twee iriscodes
wel of niet statistisch onafhankelijk zijn. Als blijkt uit de test dat 2 iriscodes statistisch
afhankelijk zijn, heeft men een “match”. Men neemt meestal als treshold waarde 0.31
(31%) voor de HD. Als de HD lager is dan 0.31 heeft men een “match”.
Statistisch onderzoek heeft aangetoond dat bij deze methode de kans dat 2 iriscodes
van 2 verschillende personen een HD zouden behalen van minder dan 0.31 ‘ver’
beneden de 10-6 ligt. Hieruit volgt dat de FAR ver beneden de 10-6 zal liggen en de
FRR onder de 1%.
De ‘treshold’ waarde voor de HD is aanpasbaar voor het geval men werkt met zeer
grote databanken (miljoenen gebruikers), op deze manier kan men de FAR laag
houden.
Figuur 44 toont een aantal irisscanners die gebruik maken van de algoritmen van J.
Daugam. Zoals je kan opmerken worden irisscanners niet gehinderd door een bril of
zelfs contactlenzen.
31
Bibliografie
[1] Iris recognition. “The colored part of the eye contains delicate patterns that vary randomly
from person to person, offering a powerful means of identification.”
John Daugman
American Scientist, Volume 89 page 326-333
[2] How iris recognition works.
John Daugman, PhD. University of Cambridge, The Computer Laboratory, Cambridge CB2 3
QG, U.K.
www.CL.cam.ac.uk/users/jgd1000/
[3] Biometric personal identification system based on iris analysis – John G. Daugman
United States Patent 5291560 - March 1, 1994
32