De Einstein Veldvergelijking:
van Materie naar Geometrie
De Einstein Veldvergelijking:..........................................................................................1
van Materie naar Geometrie ............................................................................................1
1. Tensor vergelijkingen ..................................................................................................2
1.1 Constructieve technieken .......................................................................................2
1.2 Quotient regel ........................................................................................................4
2 Analogie met Newton: een veld aanpak in 2 stappen.....................................................4
2.1 Klassieke aanpak (Newton)....................................................................................5
2.1.1 Stap 1: Bepaling van het veld ..........................................................................5
2.1.1.1 Formulering met integralen ......................................................................5
2.1.1.2 Formulering met Differentialen: de potentiaal ..........................................6
2.2 Relativistische aanpak............................................................................................7
2.2.1 Stap 1 : Einstein Veld Vergelijking .................................................................7
2.2.1 stap 2 Geodeten...............................................................................................7
3. Betekenis van E=mc2 ...................................................................................................8
4. Multi-deeltjes systemen: Vloeistofmodel ...................................................................10
5. Energie-impuls vier-tensor [Roza] .............................................................................11
6. Conclusie ..................................................................................................................14
Appendix: Lijnintegraal.................................................................................................15
1
In dit hoofdstuk hebben we het over de veld vergelijkingen (de Einstein Field Equations).
Gegeven de verdeling van materie (energie en massa) in de ruimtetijd berekenen deze 10
vergelijkingen de kromming of, anders geformuleerd, de metriek. Hierdoor komt het
verband tussen materie en geometrie tot stand.
Aangezien het in de Relativiteitstheorie steeds om tensor vergelijking gaat beginnen we
met de vraag: “Hoe weten we of een vergelijking een geldige tensor vergelijking is?” We
beginnen dit hoofdstuk met enkele observaties hierover en bruikbare tips.
Vervolgens gebruiken we een gravitatieveld zodat er – net zoals in de klassieke
mechanica - een benadering ontstaat in twee stappen: i) de bepaling van het veld en ii) het
afleiden van de beweging. De vertaling van beide stappen naar de relativiteitstheorie luidt
als volgt: in stap één bepaalt materie hoe de ruimtetijd gekromd is en in stap twee bepaalt
deze kromming hoe objecten bewegen.
De rest van dit hoofdstuk heeft te maken met de eerste stap en met de centrale rol die de
spanning-energie-impuls tensor hierin speelt. Deze tensor van rang 2 is gebaseerd op
twee uitgangspunten
- energie en massa zijn twee verschillende benamingen voor dezelfde fysische
grootheid zoals tot uiting komt in de vergelijking E = mc 2
- we willen een model vinden dat breed toepasbaar is en geldig is zowel binnen als
buiten de kern van hemellichamen zoals sterren
Daartoe doen we inspiratie op bij het Cauchy model dat een multi-deeltjes model is en
dat in de klassieke mechanica gebruikt wordt zowel voor fluida als voor elasticiteit. De
extensie naar vier dimensies leidt tot de spanning-energie-impuls tensor.
1. Tensor vergelijkingen
Tensor vergelijkingen zijn belangrijk omdat ze toelaten onafhankelijk van het
coordinatenstelsel te werken. Zodra ze bewezen zijn voor één coordinatenstelsel (dat
mogelijkerwijze specifiek voor het probleem is gekozen) zijn ze ook waar zijn in elk
ander stelsel.
k
k
Bijvoorbeeld, stel dat tensoren A en B de tensor vergelijking Aij = Bij definieren
k
k
k
waarbij deze geldig is in S. Dit kan herschreven worden als Tij = Aij − Bij = 0 of als
r r
T = 0 . Vervolgens maken we de transitie van S naar een willekeurig ander stelsel S’.
k
s
∂x t
k
r ∂x ' ∂x
Hieruit volgt dat T 'ij = Tst
= 0 + 0 + ... + 0 omdat elke Tstr = 0 zodat
r
i
j
∂x ∂x' ∂x'
k
k
A'ij = B'ij
Rest er nog de vraag hoe we weten of een vergelijking een tensor vergelijking is? Hoe
testen we het tensor karakter? In principe moeten we teruggrijpen naar de definitie van
een tensor en de transformatieregels checken. Dit kan echter complex worden. Daarom
zijn er een aantal alternatieve technieken ontwikkeld.
1.1 Constructieve technieken
Deze technieken zijn vaak constructief van aard. D.w.z. we kunnen een lijstje maken van
tensor operaties die garanderen dat het resultaat een tensor is op voorwaarde dat de
2
bouwstenen die als inputs gebruikt worden ook tensoren zijn. Voorbeelden van dergelijke
basisoperatie zijn:
1) lineaire combinaties
Stel gegeven twee tensoren T en S van dezelfde orde, bijvoorbeeld orde 2 (één
r
v
covariant en één contravariant zodat T = (T ji ) en S = ( S ij ) ) en stel λ en µ scalars
r
r
r
(invariant) zijn dan is U = λT + µS ook een tensor.
k
∂x ' i ∂x s
∂x s
k
r ∂x'
Vermits T en S tensoren zijn geldt T ' = T
& S 'l = S s
∂x r ∂x ' j
∂x r ∂x' l
Vervolgens schrijven we de getransformeerde U’ en werken uit. Daarbij moeten we
dezelfde indices gebruiken (i en j) voor de termen van de som.
i
j
r
s
r
r
r
∂x'i ∂x s
∂x'i ∂x s
∂x'i ∂x s
∂x'i ∂x s
U ' = λ ' T '+ µ ' S ' = λT 'ij + µS 'ij = λTsr r
+ µS sr r
= λTsr + µS sr
= U ij r
j
j
r
j
∂x ∂x'
∂x ∂x'
∂x ∂x'
∂x ∂x' j
(
)
2) Uitwendig produkt
r
v
Gegeven twee tensoren, bijv. T = (Tk ) en S = ( S ij ) , dan is het uitwendig product
gedefinieerd als [ST ] = ( S ijTk ) = ( Pjki ) eveneens een tensor.
Bewijs
i
s
∂x 'i ∂x s
∂x u
∂x'i ∂x s ∂x u
∂x u
r
r ∂x' ∂x
P'ijk = S 'ij T ' k = S sr r
T
=
S
T
=
P
u
s u
su
∂x ∂x ' j ∂x' k
∂x r ∂x' j ∂x 'k
∂x r ∂x ' j ∂x 'k
de
Toepassing: van twee vier-vectoren naar 2 orde tensor
3) Inwendig product
Om het inwendig product van twee tensoren te nemen moet men één bovendindex en
één beneden index kiezen en deze aan elkaar gelijk stellen. In het algemeen zijn er
meerdere dergelijke keuzes mogelijk en dus meerdere inwendige producten.
r
v
Gegeven de twee tensoren uit het vorig voorbeeld, T = (Tk ) en S = ( S ij ) , dan is het
inwendig product gedefinieerd als
r
U = (U j ) = ( S ijTi )
U ' j = ( S 'ij T 'i ) = ( S sr
s
∂x'i ∂x s ∂xu
∂x 'i ∂xu ∂x s
∂x s
∂x s
r
r
u ∂x
r
T
)
=
S
T
(
)
=
S
T
δ
=
S
T
=
U
u
s u
s u r
s r
s
∂x r ∂x' j ∂x'i
∂x r ∂x 'i ∂x ' j
∂x ' j
∂x' j
∂x ' j
waaruit volgt dat U een covariante tensor is van orde 1.
4) Contractie
Dit is net zoals het inwendig product een operatie waarbij de orde verlaagd wordt.
Een inwendig product kan worden gevonden door eerst het uitwendig product te
vormen en daarna contractie toe te passen.
Deze basisoperaties kunnen worden gecombineerd in willekeurige volgorde om nieuwe
tensors te vormen.
3
1.2 Quotient regel
De quotient regel luidt: “Als men kan aantonen dat inwendig produkt TV een tensor is
voor alle V’s dan is T een tensor”. Hieruit volgen een paar speciale gevallen:
a) Als TiV i = E constant of invariant is voor alle contravariante tensors Vi dan is Ti
een covariante tensor van orde 1.
b) Als TijV i = U j componenten zijn van een covariante vector Vi dan is Tij een
covariante tensor van orde 2.
c) Als TijU iV j = E constant of invariant is voor alle contravariante tensors Ui en Vi
dan is Tij een covariante tensor van orde 2.
2. Analogie met Newton: een veld aanpak in 2 stappen
In de Relativiteitstheorie onderscheiden we twee verschillende stappen. In stap één
bepaalt materie hoe de ruimtetijd gekromd is en in stap twee bepaalt deze kromming hoe
objecten bewegen. De Einstein veldvergelijking heeft te maken met de eerste stap.
Een vaak gebruikte manier om deze veldvergelijking af te leiden bestaat er in te
vertrekken van de klassieke theorie van Newton en deze dan om te zetten naar de
relativiteitstheorie. Dit is mogelijk omdat in de klassiek theorie een gelijkaardige
benadering in twee stappen kan herkend worden gebaseerd op het concept van een veld,
in dit geval een gravitatieveld.
Velden
Een veld is een fysische grootheid (scalar, vector of tensor) waaraan een waarde wordt
toegekend in elk punt van de ruimte-tijd.Het concept van een veld is vaak gebruikt in de
fysica, niet alleen voor gravitatie maar ook in de elektriciteitsleer. Een veld heeft de
volgende eigenschappen:
• Het ondersteunt interactie tussen voorwerpen op afstand (zonder dat er contact
hoeft te zijn)
• De introductie van een veld is nauw verweven met de opslitsing van het probleem
in twee delen waarbij het veld een interface rol vervult. In een eerste stap moeten
we het veld bepalen gegeven een bepaalde verdeling van de massa. In een tweede
stap laat het veld toe de kracht te bepalen op een massa die we op deze plaats
aanbrengen en de beweging af te leiden.
• Het is een energie veld. Dit betekent dat er arbeid verricht moet worden als
voorwerpen verplaatst worden in het veld. Er vindt energie uitwisseling plaats
waarbij potentiele in kinetische energie wordt omgezet of omgekeerd.
Dit geldt dus ook voor een Newtoniaanse aanpak waar het veld in elk punt van de ruimte
gedefinieerd is als een vector g (veldsterkte) die gelijk is aan de versnelling die een
voorwerp zou ondervinden wanneer het zich op dezelfde plaats zou bevinden.
Stel, bijvoorbeeld, dat de aarde als enige massa gegeven is, dan ontstaat er een radiaal
symmetrisch vector veld voorgesteld door een vector g die in elk punt wijst naar het
middelpunt van de aarde. De grootte van de vector is dezelfde voor gelijke afstanden tot
dit middelpunt. De eerste stap wordt de bepaling van dit veld en de tweede stap de
berekening van de kracht en daaruit afgeleid de beweging.
4
Beide aanpakken (Newton en Einstein) gebruiken het veld concept of de twee stappen
benadering weliswaar verschillend maar niet tegenstrijdig. Wel integendeel, voor relatief
zwakke velden en lage snelheden is de klassieke aanpak een goede benadering. De
Relativiteitstheorie kan dus eerder gezien worden als een uitbreiding of veralgemening
van de Newtonse aanpak. Daarom werkt het inzicht verhogend om beide methodes naast
elkaar te zetten.
2.1 Klassieke aanpak (Newton)
2.1.1 Stap 1: Bepaling van het veld
2.1.1.1 Formulering met integralen
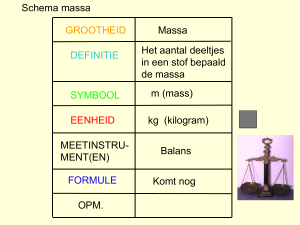
Het veld is gegeven door de versnelling g. In stap 1 moeten we in elk punt van de ruimte
r r
het vectorveld g (x ) berekenen. We geven de formulering met vectoren. Stel dat we twee
puntmassa’s identificeren als m1 en m2 met bijhorende verplaatsingsvectoren
r
r
r
r r
x1 en x 2 . Stel verder dat x12 = x2 − x1 de vector is van m1 naar m2 en dat
r r
r
x2 − x1
xˆ12 = r r de eenheidsvector is op de verbindingsas van beide massa’s en F12 de
x2 − x1
r
mm
kracht uitgeoefend op m2 door m1 dan is F12 = −G r 1 r2 2 x̂12 en het veld opgewekt
x 2 − x1
r
− Gm
door massa m1 is g = r r 1 2 x̂12 . Het min teken drukt uit dat de beide massa’s elkaar
x 2 − x1
aantrekken en niet afstoten.
F12
m1
m2
m2
F21
dm(r )
x2-x1
x-r
x2
x
x1
r
Figure 1: Constructie van het zwaartekracht veld voor puntladingen (links) en voor voorwerpen met
verdeelde materie.
5
Als er meerdere puntmassa’s mi in het beschouwde universum aanwezig zijn op plaatsen
r
mi
r
1
xi dan moeten we sommeren over alle massa’s. g =
F
∑
i 2 = −G ∑ r
r 2 xˆ i 2
m2 i
i
x2 − xi
Als de massaverdeling gegeven is als een continue verdeling dan maken we gebruik van
r
r
r r
een dichtheidsfunctie en het Euclidische volume element dm(r ) = ρ (r )dV = ρ (r )d 3 r
voor de berekening van g
r
r r
r
r
1
dm(r )
ρ (r )d 3 r
g=
∑ Fi 2 = −G ∫ xr − rr 2 = −G ∫ xr − rr 2
m2 i
2.1.1.2 Formulering met Differentialen: de potentiaal
Een conservatieve kracht is gedefinieerd als een kracht die alleen afhangt van de positie
in het veld. Daaruit volgt dat de geleverde arbeid bij beweging van een object van de ene
positie naar de andere, niet afhangt van gevolgde weg. In deze situatie kan er, in plaats
van een vectorveld, ook gebruik worden gemaakt van een scalair veld, dat we potentiaal
noemen. De zwaartekracht is conservatief.
Plaatsen waar de potentiaal dezelfde is vormen equipotentiaal oppervlakken. De
overeenkomstige vector van het vectorveld staat dan loodrecht op deze equipotentiaal
oppervlakken. De grootte van de vector is de locale verandering van de potentiaal als
functie van de afstand volgens deze loodlijn. Bijvoorbeeld, in geval van een puntmassa
zijn deze equipotentiaaloppervlakken concentrische bollen. De overeenkomstige vector
heeft de richting van de radiaal.
We kunnen nu heen en weer transformeren tussen het potentiaalveld en het vector veld
van de versnelling. De gradient speelt daarbij een centrale rol.
r
r
∂Φ ∂Φ ∂Φ
∂Φ r ∂Φ r ∂Φ r
r r
= −
g ( x ) = F = − grad (Φ) = −∇Φ = −
,
,
ex +
ey +
ez
∂y
∂z
∂x ∂y ∂z
∂x
Als Φ(x,y,z)=a (a is een constante) dan stelt dit een oppervlak voor en is grad(Φ) in een
punt P een vector die loodrecht op het oppervlak staat. De componenten van de vector
zijn de partiele afgeleiden naar de coordinaten.
De gravitatie flux door een oppervlak is gedefinieerd als
r
r
∫∫ g • dA =Φ waarbij dA een
vector is loodrecht op een infinitesimale oppervlakte. Deze is nodig om de wet van Gauss
te formuleren.
Wet van Gauss (zwaartekracht): de flux door een gesloten oppervlak is evenredig met de
r r
omsloten massa of ∫∫ g • dA = −4πGM
Toepassen van het divergentie theorema laat toe het linkerlid te herschrijven als
r r
r
∫∫ g • dA = ∫ ∇ • gdV . Anderzijds kan het rechterlid herschreven worden als integraal
V
van een verdeelde massa: − 4πGM = −4πG ∫ ρdV . Hieruit volgt
V
6
r
− 4πG ∫ ρdV = ∫ (∇ • g )dV
V
V
r
∫V (−4πGρ )dV = ∫V (∇ • g )dV
r
− 4πGρ = ∇ • g
Samenvattend zijn er in de klassieke mechanica 2 formuleringen om het veld te vinden:
r
r r
r d 3 x'
• een rechtsreekse manier die leidt tot een integraalvorm g ( x ) = −G ∫ ρ ( x ' ) r r 3
x − x'
r
2
• een differentiaalvorm in termen van de potentiaal ∇ Φ = 4πGρ ( x ) waarin
∇2 = (
∂2
∂2
∂2
+
+
) de Laplace operator voorstelt.
∂x 2 ∂y 2 ∂z 2
2.2 Relativistische aanpak
2.2.1 Stap 1 : Einstein Veld Vergelijking
In deze stap hebben we het over de EFEs (de Einstein Field Equations). Gegeven de
massa’s en hun verdeling in de ruimtetijd berekenen deze vergelijkingen het krachtenveld
en vervolgens ook de kromming of, anders geformuleerd, de metriek.
Het is een tensor vergelijking waarbij de evenredigheid wordt uitgedrukt tussen twee
tensoren. Deze evenredigheid is alleen mogelijk als beide tensoren dezelfde rang hebben
(rang 2). Het betreft de energie-impuls tensor Tµυ aan de ene kant en de krommingstensor Gµυ aan de andere kant. Tµυ = kGµυ De energie impuls tensor wordt verder in deze
tekst besproken. We beperken ons hier tot het geven van deze vergelijking zonder
afleiding. Dit leidt tot het volgende resultaat dat op een compacte manier 16
vergelijkingen representeert waarvan er 10 overblijven omwille van symmetrie.
R µυ −
1
8π G
g µυ R + g µυ Λ = 4 T µυ
2
c
Rµυ
Ricci krommingstensor
R
scalaire kromming of Ricci tensor waarvoor geldt dat R = g µυ Rµν
g µυ
Λ
G
Tµυ
metrische tensor
kosmologische constante
gravitatie constante van Newton
spannings-energie-impuls tensor
2.2.1 stap 2 Geodeten
Bij aanvang van stap 2 is gµν gekend en moeten we de beweging vinden. In de
Relativiteitstheorie betekent dit dat we een zo recht mogelijke verbinding op een
gekromd oppervlak zoeken. Dit doen we met behulp van de geodetische vergelijking.
d 2 xµ
dx α dxν
µ
+
Γ
=0
αν
dλ dλ
dλ2
Invullen van de Christoffelsymbolen geeft
7
d 2 xµ
dxα dxν
+
(
1
/
2
)(
+
−
)
=0
g
g
g
g
µµ
µα
ν
µ
ν
α
αν
µ
,
,
,
dλ2
dλ dλ
Dit is het equivalent van F=ma zodat de tweede term als een kracht kan worden gezien.
3. Betekenis van E=mc2
De energie-impuls vier-vector bevat de volledige informatie met betrekking tot de –
steeds samen voorkomende - energie, massa en impuls van een deeltje. Het verband
tussen massa en energie was het onderwerp van één van Einstein’s papers in 1905 met als
titel “Is de traagheid van een voorwerp afhankelijk van zijn energie-inhoud?”. Hierin
wordt de wellicht bekendste wet van fysica behandeld namelijk E=mc2 . In het paper
vraagt Einstein zich af of de traagheidsmassa van een voorwerp beinvloedt wordt door de
energie. Wat is de betekenis hiervan? Hoe moeten we dit interpreteren?
Daarvoor keren we terug naar vier-vectoren en de manier waarop ze geconstrueerd
worden. Dit gebeurt door een vier-scalar te vermenigvuldigen met de vier-snelheid. Een
vier-scalar blijft in elk Lorentz frame dezelfde en is een invariant van de transformatie.
De nieuwe vier-vector kan als volgt worden geinterpreteerd. De eerste component stelt de
dichtheid voor van de fysische grootheid die correspondeert met de scalar. De tweede,
derde en vierde component daarentegen stelt de bewegende versie of stroom versie van
dezelfde fysische grootheid voor.
Voorbeeld: [elektrische lading en elektrische stroom]
Een goed voorbeeld is elektrische lading en elektrische stroom die in de klassieke fysica
als twee verschillende fysische grootheden werden behandeld. Het verschil is echter
louter aan de beweging te wijten: elektrische lading is in rust voor een waarnemer en
elektrische stroom is elektrische lading die in beweging is. Vermits de relativiteitstheorie
een ingebouwde manier heeft om met dit soort beweging om te gaan kunnen beide
begrippen opgenomen worden in eenzelfde
structuur van een vier-vector
r
α
J = ( ρ elec , J elec ) .
Dit passen we nu ook toe op de gravitatie massa m0 . We vermenigvuldigen deze scalar
met de vier-snelheid
dX α
dX α
Pα = m0U α = m0
= m0γ
= m0γ u (c, u x , u y , u z )
dτ
dt
De eerste component staat nu voor massa in rust en de laatste drie voor massa in
beweging. Beiden representeren energie. Als we eerst met c vermenigvuldigen hebben de
termen de dimensie van energie. In de onderstaande reeksontwikkeling maken we een
onderscheid tussen termen die wel of niet afhangen van de snelheid u. Dit wil zeggen een
onderscheid tussen de kinetische energie (Ekin) enerzijds en andere vormen van energie
(m0c2) anderzijds.
m0 c
1 u2 3 u4
P0 = m0γ u c =
= m0 c(1 +
+
+ ...)
2 c2 8 c4
1− u 2 / c2
1
3 m0 u 4
cP0 = m0γ u c 2 = m0 c 2 + m0u 2 +
+ ... = m0 c 2 + Ekin
2
2
8 c
8
Dit kan nu op twee manieren worden gelezen. Als we de totale energie cP0 noteren met E
en de totale massa met m = m0γ u dan geldt E = mc 2 . Als we hetzelfde doen voor de
totale rust energie die we noteren met E0 en de rust massa met m0 dan geldt eveneens
E 0 = m0 c 2 .
r r r
We kunnen de vier-vector nu schrijven als Pα = ( E / c, p x , p y , p z ) of in vectornotatie
r
r
als P = ( E / c, p ) Vervolgens berekenen we de lengte van de vector door middel van het
scalair product met zichzelf. Deze lengte moet constant zijn, dit wil zeggen onafhankelijk
van de waarnemer en van de snelheid u:
r
r r
r
P = Pa • P a = ( E / c) 2 − p 2 = ( E / c) 2 − δ ij p i p j = const . De waarde van deze
constante kan rechtstreeks uit de definitie worden berekend.
r
r
r
r r
r r
P = m0U ⇒ P = P • P = m02U • U = m02 c 2 = m0 c
Dit leidt tot de Energie-impuls relatie die randvoorwaarden aangeeft hoe de energie E en
het impuls (vector P) moeten veranderen zodat m0c constant blijft bij een Lorentz
transformatie. Het verband tussen E, p en m0 wordt
m0 c = ( E / c) 2 − ( p) 2 ⇒ (m0 c) 2 = ( E / c) 2 − ( p) 2 ⇒ (m0 c 2 ) 2 = ( E ) 2 − ( pc) 2
Er is een verschil tussen open en gesloten systemen. In een gesloten systeem is geen
energie uitwisseling met de omgeving mogelijk en dus blijft de totale energie, de totale
impuls en dus ook volgens bovenstaande betrekking de rustmassa dezelfde. In een open
systeem daarentegen kan energie wel toe of afgevoerd worden, bijvoorbeeld in de vorm
van warmte of licht. In deze situatie verandert de rust massa of de invariante massa wel.
Voorbeeld 1: Stel een vogel boven op een kerktoren bevindt zich ten opzichte van een
waarnemer in rust en heeft een bepaalde rust massa en rust energie. Als hij begint te
vliegen komt daar kinetische energie/massa bij. De totale energie wordt dus groter.
Voorbeeld 2: Bindingsenergie van een alpha deeltje
Een alpha deeltje bestaat uit 2 neuronen en twee protonen. Als we de massa berekenen als
de som van deze componenten vinden we: de massa van een neuron is 1,008 u en van een
protron 1,00728 u. De totale som wordt 4,03188 u. Het echte gewicht is lager namelijk
4.00153 u. Het verschil is de bindingsenergie. Deze is ook gelijk aan de energie die moet
toegevoerd worden om de binding te breken.
Conclusie: massa en energie
•
•
•
•
Uit m = m0γ u volgt dat massa en energie relatief zijn.
Hieruit volgt ook dat een lichaam in rust energie bezit
De betekenis van E = mc 2 is dat massa en energie equivalent zijn. Het zijn twee
benamingen voor eenzelfde fysische grootheid waartussen een evenredigheid
bestaat gelijk aan c2.
E = mc 2 kan gelezen worden met E en m als de totale energie/massa maar ook
met E0 en m0 als de rustwaarden zodat E0 = m0 c 2 .
9
•
Als een lichaam beweegt is het verband tussen de totale energie en de rustmassa
gegeven door de Energie-impuls relatie (m0 c 2 ) 2 + (cp) 2 = E 2 Hierin is m0 een
constante en zijn p en E afhankelijk van de waarnemer.
4. Multi-deeltjes systemen: Vloeistofmodel
Na de discussie in het vorig hoofdstuk over energie en massa keren we terug naar de
centrale vraag hoe de aanwezige energie en massa vertaald wordt in een krachtenveld en
hoe dit krachtenveld vervolgens vertaald kan worden in een kromming van de ruimtetijd.
De beschrijving van situaties met zeer sterke zwaartekracht (zoals die voorkomen in het
inwendige van een ster) en het modelleren van systemen met grote snelheden (zoals de
expansie van de kosmos) kan alleen gebeuren met behulp van de Relativiteitstheorie. Het
model met geconcentreerde puntmassa’s is voldoende om de ruimte buiten een voorwerp
(bijv een ster) te beschrijven maar is te beperkt om ook de toestand binnen sterren te
beschrijven. We moeten naar een model van een bewegende deeltjeswolk die beschreven
wordt als een continue verdeling. Dit sluit aan bij een vloeistofmodel uit de klassieke
fysica van fluida. In deze contekst zijn er twee opties:
- De eerste optie sluit aan bij de bekende deeltjesmechanica. De vloeistof wordt
opgedeeld in elementaire volumes, vloeistof partikels genoemd, die elk een
coordinaat toegewezen krijgen en waarvan de beweging wordt berekend.
- De tweede optie (Euler) is niet gericht op de deeltjes maar op een punt in de
ruimte met gegeven coordinaten. De vloeistof wordt gekarakteriseerd door
hieraan macroscopische grootheden zoals dichtheid, druk, entropy, viscositeit
etc...toe te kennen. De belangrijkste grootheden zijn de dichtheid en de snelheid.
Beiden zijn tensorvelden die we noteren als ρ(x,y,z,t) en v(x,y,z,t).
In een continuum neemt men aan dat er te veel deeltjes een rol spelen om ze individueel
te kunnen volgen. We nemen aan dat er vloeistof partikels kunnen worden gedefinieerd
van een bepaalde grootte zodat binnen het volume de macroscopische waarden als
constant kunnen worden beschouwd maar dat ze daarbuiten kunnen varieren.
We onderscheiden nu een aantal eigenschappen van stromende vloeistoffen. Een
stroming is regelmatig als de snelheid in een willekeurig punt van de ruimte niet afhangt
van de tijd. Een stroming is rotationeel als voorwerpen die meegevoerd worden in de
stroom een rotatie uitvoeren. Een stroming kan comprimeerbaar zijn of niet. Niet
comprimeerbaar betekent dat de dichtheid een constante is onafhankelijk van ruimte of
tijd coordinaten. Tenslotte kan een stroming visceus zijn of niet. Viscositeit introduceert
tangentiele krachten wrijvingskrachten tussen vloeistoflagen die met een verschillende
snelheid bewegen. Stroomlijnen zijn belangrijk. Een stabiele flow betekent dat dat de
snelheid in een gegeven punt niet verandert. Elk deeltje passeert er met dezelfde snelheid
en dezelfde richting. Als we zo’n pakketje volgen vinden we een stroomlijn die overal
evenwijdig is met de locale snelheid. Meerdere stroomlijnen kunnen worden
samengevoegd tot een bundel. Er zijn geen deeltjes die stromen doorheen de zijwanden
van een bundel zodat de bundel als een pijp kan worden gezien.
10
Visie tot twee types: ‘perfecte vloeistoffen’ en ‘stof ‘(dust).1
In ‘Perfecte vloeistoffen’ zijn er geen schuifspanningen, geen viscositeit en geen
warmtegeleiding. Blijft alleen over:massa dichtheid ρ en druk p. Bij een stofmodel (dust)
valt daarenboven ook de druk nog weg (p=0) en blijft alleen de massa/energie over.
5. Energie-impuls vier-tensor [Roza2]
We nemen als vertrekpunt de (Cauchy) spanningstensor zoals gebruikt in de klassieke
theorie van fluida of bij de vervorming van vaste objecten (elasticiteitsleer). Voorlopig
gaan we uit van een tensor van orde twee die de toestand van een gegeven punt in de 3D
energie-impuls-tensor ruimte volledig karakteriseert. Deze tensor zal vervolgens
uitgebreid worden naar 4 dimensies.
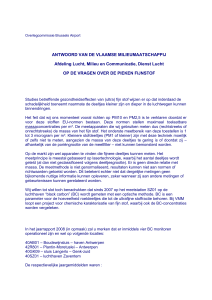
Figuur 2 toont een elementair volume element ∆ V=(∆1, ∆2, ∆3) in een rechthoekig
stelsel. Op elk van de drie vlakken (x=∆1, y=∆2 en z=∆3) werkt een kracht die een
willekeurige grootte en richting kan hebben. Deze kan voor elk van de drie vlakken
ontbonden worden in 3 componenten voor het gegeven assenstelsel. Daarbij kan de
berekening gebeuren per oppervlakte eenheid zodat krachten vervangen worden door
spanningen aangegeven door σ. Op elk van de drie vlakken hebben we één
normaalspanning en twee tangentiele spanningen of schuifspanningen.
z
σ33
∆3
σ32
31
σ
σ23
σ13
σ22
σ12
σ21
y
∆2
σ11
∆1
x
Figure 2 Model van Cauchy waarbij een infinitesimaal volume op elk van de zijwanden gemodelleerd
wordt door een drukkracht en twee schuifkrachten.
1
Er is ook nog de stralings vloeistof. Dit is een perfecte vloeistof waarvoor geldt dat µ=3p zodat
(
T µν = p 4U µ U ν + g µν
2
)
Engel Roza, “Ruimte, Tijd en Energie: 100 jaar Relativiteitstheorie”, ISBN 90-9019549-1
11
Bijvoorbeeld op het voorste vlak (x=∆1) zijn er 3 spanningen die een rol
r r r
spelen (σ 11 , σ 12 , σ 13 ) . De eerste index van sigma identificeert het vlak waarop de kracht
werkzaam is of waar het aangrijpingspunt zich bevindt. Bijvoorbeeld, 1 staat voor het
vlak x=∆1, 2 betekent y=∆2, en 3 staat voor z=∆3. De tweede index identificeert de
componente (1 is de x componente // x-as, 2 staat voor y en 3 voor z).
Als we de tensor kennen is het mogelijk de kracht te berekenen op een willekeurig
oppervlak door een gegeven punt P. Als we dit vlak interpreteren als een denkbeeldige
snede waarbij het oppervlak wordt gegeven door de normaal n, dan wordt de vector F (de
r r r
resulterende kracht op een denkbeeldige snede door het punt) berekend als F = σ • n of
F i = σ ij n j
F 1 σ 11 σ 12
2 21
σ 22
F = σ
F 3 σ 31 σ 32
σ 13 n1
σ 23 n2
σ 33 n3
Voorbeeld
Stel dat we de netto resulterende kracht F in de x richting willen kennen. Dan is n=(1,0,0)
r
een vlak voor loodrecht op de x richting en geldt F = ( F 1 , F 2 , F 3 ) = (σ 11 , σ 21 , σ 31 ) . Er
zijn drie componenten bij betrokken: een normale stress componente σ11 loodrecht op het
yz vlak en twee schuifspanningen: σ21 de schuifspanning parallel met het xz vlak en σ31
de schuifspanning parallel met het
xy vlak. Na vermenigvuldiging met de
1
11
respectievelijke oppervlakken geldt F = σ ∆ 2 ∆ 3 + σ 21 ∆ 2 ∆ 3 + σ 31∆1 ∆ 2
1
Dit kan herschreven worden als F =
σ 11 ∆V
∆1
+
σ 21 ∆V
∆2
1
We noteren de sommatie in tensor vorm als F =
+
σ 31 ∆V
∆3
waarin ∆V=∆1∆2∆3
σ j1∆V
voor j=1…3
∆j
r
Anderzijds kan de impuls van het deeltje berekend worden als ρv∆V en de kracht als de
ρ∆Vv1
verandering van de impuls F 1 =
. Gelijk stellen aan de vorige vergelijking geeft
∆t
ρv1∆ j
σ j1 ∆V ρ∆Vv1
F1 =
=
⇒ σ j1 =
⇒ σ j1 = ρv1v j
∆j
∆t
∆t
Dit kan niet alleen voor x gebeuren maar ook voor y en z of in het algemeen voor
i=(x,y,z) zodat
σ ji = ρvi v j
Equation 1
Van 3 naar 4 dimensies
Om dit vervolgens uit te breiden naar 4D zoeken we inspiratie bij vier-vectoren. Deze
construeren we door een scalar te vermenigvuldigen met de viersnelheid. Zo krijgen we
entiteiten waarin de scalar in rust voorkomt samen met de scalar in beweging.
Bijvoorbeeld, als we voor de scalar de elektrische lading kiezen dan stelt de eerste
12
component een lading voor die stil staat ten opzichte van de waarnemer . Componenten 2,
3 en 4 stellen echter bewegende elektrische lading voor zijnde elektrische stroom
Als we voor de scalar massa kiezen dan vinden we
dX α
dX α
Pα = m0U α = m0
= m0γ
= m0γ u (c, u x , u y , u z ) , met andere woorden massa in rust
dτ
dt
en massa in beweging. Op deze manier breiden we het model uit van 3 naar 4 dimensies.
Dit kan worden doorgetrokken naar een tensor van rang 2. Om een tensor van een hogere
rang te bekomen passen we het uitwendig produkt van tensoren toe zoals beschreven in
r
v
sectie 1. Bijvoorbeeld, gegeven twee tensoren, P = ( P j ) en S = ( S i ) , dan is het
uitwendig product gedefinieerd als [SP ] = ( S i P j ) = (T ij ) eveneens een tensor. We passen
dit toe zodat T ab = ρ 0U aU b . Dit is een tensor omdat U een vier-vector is en ρ0 een
scalar. Bovendien is het een tensor van rang twee waarbij elke component het produkt is
van twee snelheden in lijn met Eq 1.
Interpretatie
Vergelijkbaar met de interpreatie voor vier-vectoren waarbij de eerste component de
dichtheid voorstelt van een scalaire fysische grootheid die correspondeert met de scalar
en waarbij de tweede, derde en vierde component de bewegende versie daarvan voorstelt,
zo ook kunnen we de tensor T interpreteren.
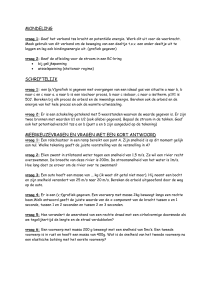
Definitie [energie-impuls-tensor Tab]
Deze tensor Tab van tweede orde is gedefinieerd als de flux van de a-component van de
energie-impuls vier-vector door een oppervlak van constante xb coordinaten.
Energie dichtheid
T00 T01 T02 T03
11
T10 T T12 T13
Impuls flux
T20 T21 T22 T23
T30 T31 T32 T33
Impuls dichtheid
Impuls flux
druk
Figure 3 Energie-impuls-druk vier-vector
13
De tensor heeft nu 16 componenten waarvan 10 verschillende componenten waarvan de
interpretatie de volgende is:
- a=b=0::T00 is de nul-de component van de vier-vector, de energie,
doorheen een oppervlak van constante tijd. Dit betekent de energie
dichtheid
- (a=0) & (b=1,2,3)::T0b is de energie flux doorheen een oppervlak xb=
constante
- (a=1,2,3) & (b=0)::Ta0 is de flux van de impuls component a doorheen
een oppervlak xb= constante_tijd (b=1,2,3) Dit betekent dus impuls
dichtheid.
- (a=1,2,3) & (b=1,2,3)::Tab is de flux van de impuls component a doorheen
een oppervlakte xb= constante (a,b=1,2,3). Dit betekent stress: druk voor
de diagonaal elementen en schuifspanning voor de rest.
6. Conclusie
In dit hoofdstuk wordt besproken hoe de aanwezige energie/massa vertaald wordt in de
kromming van de ruimte waaruit vervolgens een krachtenveld kan worden afgeleid. Het
betreft de stap van materie naar geometrie. De oorzaak van het gravitatieveld is de
aanwezigheid van materie of, met andere woorden, energie en massa die volgens
E = mc 2 dezelfde fysische grootheid voorstellen, weliswaar gemeten met verschillende
eenheden zodat er een vaste verhouding van c2 tussen beiden bestaat. Zowel rust massa
als bewegende (translatie of rotatie) massa hebben een hoeveelheid energie die een veld
definieren. Een voorwerp bewegen in zo’n veld betekent dat er arbeid wordt verricht.
We willen dat het model breed toepasbaar is, bijvoorbeeld zowel binnen als buiten een
ster. Het moet dus een soort veranderende deeltjeswolk zijn. Dit suggereert een model dat
lijkt op een Cauchy model gebruikt in de vloeistofmechanica of in de elasticiteitsleer. In
elk gegeven punt kunnen er vloeistof partikels worden gedefinieerd van een bepaalde
grootte zodat binnen het volume de macroscopische waarden als constant kunnen worden
beschouwd maar dat ze daarbuiten kunnen varieren. Dit model heeft op de verschillende
coordinaatvlakken normaal spanningen (loodrechte druk) en schuifspanningen
(evenwijdig met het oppervlak) die georganiseerd worden in een 3x3 matrix.
We breiden dit nu uit naar 4D en definieren de energie-impuls-tensor als T ab = ρ 0U aU b .
Dit is een tensor omdat U een vier-vector is en ρ0 een scalar. Bovendien is het een tensor
van rang twee waarbij elke component het produkt is van twee snelheden.
14
Appendix: Lijnintegraal
We zijn vooral geinteresseerd in de berekening van de arbeid als we bewegen in een
r r
krachtenveld. We moeten dan ∫ F • dr uitrekenen.
C
•
r
r
r
r
Als we het veld noteren als F ( x, y , z ) = P( x, y , z)ex + Q ( x, y, z )ey + R( x, y , z )ez en
r
r
r
r
de curve als r (t ) = x(t )e x + y (t )e y + z (t )e z dan kan dit herschreven worden als
r r b
r
r
r
r
r
r
F
∫ • dr = ∫ P( x, y, z)e x + Q( x, y, z )e y + R( x, y, z )e z • x' (t )e x + y' (t )e y + z ' (t )e z dt
[
C
] [
]
a
b
b
b
b
b
b
b
b
a
a
a
a
a
a
a
a
= ∫ (Px '+Qy'+ Rz ')dt = ∫ Px' dt + ∫ Qy' dt + ∫ Rz ' dt = ∫ Pdx + ∫ Qdy + ∫ Rdz = ∫ Pdx + Qdy + Rdz
Dit laatste is een lijnintegraal. Een ‘lijnintegraal met betrekking tot x’ is gedefinieerd
als ∫ f ( x, y )dx en met betrekking tot y als ∫ f ( x, y )dy . De algemene vorm is
C
C
∫ P( x, y)dx + ∫ Q( x, y)dy = ∫ Pdx + Qdy
C
C
Hierin zijn f(x,y), P(x,y) en Q(x,y) 2D
C
oppervlakken. De essentie van een lijnintegraal is dat de integratie gebeurt langs een
curve C. Er komen dus twee veranderlijke voor (x en y) in de integraal maar de
specificatie van C zorgt voor een extra verband tussen x en y. Bijvoorbeeld, als de curve
een cirkel is dan geldt x 2 + y 2 = r 2 .
Dit wordt duidelijker als we overgaan op een geparametriseerde beschrijving. We hebben
één parameter t waarin we alles kunnen uitdrukken. We schrijven x=h(t) en y=g(t) en de
expressie voor de curve x=x(t) en y=y(t). Bijvoorbeeld voor de cirkel schrijven we nu
x=rcos(t) en y=rsin(t). De definitie kan dus worden geschreven als
∫ f ( x, y)dx = f ( x(t ), y(t )) x' (t )dt
C
Eigenschappen:
∫ Pdx + Qdy = − ∫ Pdx + Qdy
−C
C
Stelling van Green in een vlak
Als P, Q, ∂P / ∂y , ∂Q / ∂x éénwaardige continue functies zijn en als C een gesloten curve is
die in positieve zin wordt doorlopen en als R de ingesloten oppervlakte is, dan geldt
∂Q ∂P
∫C Pdx + Qdy = ∫∫R ∂x − ∂y dxdy
Theorema: [lijnintegraal onafhankelijk van het pad]
Een nodige en voldoende voorwaarde opdat een lijnintegraal
∫ Pdx + Qdy
onafhankelijk
−C
∂Q ∂P
=
∂x ∂y
Anders geformuleerd betekent dit dat Pdx+Qdy een exacte differentiaal is of dat
Pdx+Qdy=dΦ waarbij Φ de potentiaal voorstelt.
is van het gevolgde pad/curve is dat
15
Theorema: [lijnintegraal onafhankelijk van het pad in 3D]
Een nodige en voldoende voorwaarde opdat een lijnintegraal
∫ Pdx + Qdy + Rdz
−C
onafhankelijk is van het gevolgde pad/curve is dat
∂Q ∂P ∂Q ∂R ∂P ∂R
=
&
=
&
=
∂x ∂y
∂z ∂y ∂z ∂x
Stel dat we dit toepassen op de gradient (vector) van f die gedefinieerd is als
r
r
r
∇f = ( f x , f y , f z ) = f x ex + f y ey + f z ez . Stel dat deze gradient functie en ook de curve
r
r
r
continue zijn. Dan geldt dat ∫ ∇f • dr = f (r (b)) − f (r (a ))
C
r
r
r
Voorbeeld: F ( x, y, z ) = ye x + xe y is
conservatief.
conservatief en
r
r
r
F ( x, y , z ) = − yex + xe y
is
niet
Divergentie theorema (Stelling van Green in de ruimte)
Stel dat S een gesloten oppervlak is met een volume V. Stel dat we de normale die naar
buiten gericht is als positief rekenen. Stel dat er een vectorveld A gedefinieerd is en dat n
de normaalvector voorstelt. Dan geldt
r r
r
∫∫ ( A • n)dS = ∫∫∫ (∇ • A)dV
S
V
Met andere woorden, de oppervlakte integraal van de normale componente van een
vector A over een gesloten oppervlak is gelijk aan de volume integraal van de divergentie
van A.
Stel een kracht omgekeerd evenredig met het kwadraat van de afstand zoals de
v − GM
zwaartekracht, F =
. Stel dat we als oppervlak een bol kiezen zodat F parallel is
r2
met de normaal. Toepassen van het theorema met A=F geeft
r r
− GM
− GM
∫∫S ( A • n)dS = ∫∫S FdS = ∫∫S r 2 dS = ∫∫S r 2 rdϕrdθ = −GM 4π = −G 4π ∫∫∫ ρdV
Invullen in het theorema
r
− G 4π ∫∫∫ ρdV = ∫∫∫ (∇ • F )dV
V
V
r
− G 4πρ ∫∫∫ dV = (∇ • F ) ∫∫∫ dV
V
r
− G 4πρ = ∇ • F
− G 4πρ = ∇ • (−∇Φ )
end appendix
V
16