RECENSIE
RECENSIE
Treed binnen in de wereld van
parallelle verwerking
met de Parallax Propeller
™
Door Dr William Marshall, RS Components
Zo nu en dan zien we ineens iets nieuws. De ontwikkeling van
microcontrollerchips volgt al jaren hetzelfde pad: óf dezelfde ‘basis-’processor
wordt omgeven door steeds meer randapparaten, óf de processor zelf wordt
steeds krachtiger gemaakt.
Cog 0
Cog 1
Cog 2
Cog 3
Cog 4
Cog 5
Cog 6
Cog 7
Pin-richting
Pin-uitvoer
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
I/O-richtingsreg.
Videogenerator
I/O-uitgangsreg.
Teller A + PPL
Teller B + PPL
32
32
P31
P15
P30
P14
P29
P13
P28
P12
P27
P11
P26
P10
P25
P9
P24
P8
I\O
Pins
P23
P7
P22
P6
P21
P20
P5
P4
512 x 32
RAM
512 x 32
RAM
512 x 32
RAM
512 x 32
RAM
512 x 32
RAM
512 x 32
RAM
512 x 32
RAM
512 x 32
RAM
P19
P3
P18
P2
Processor
Processor
Processor
Processor
Processor
Processor
Processor
Processor
P17
P16
P1
P0
32
32
Pin-invoer
32
Systeemteller
32
Databus
16
Adresbus
P28
P29
P30
P27
34
35
36
37
VSS
VDO
P31
38
39
40
P1
P2
P3
P0
41
42
43
44
VSS
P4
1
33
P26
P5
2
32
P25
P6
3
31
P24
P7
4
30
VDD
P9
10
24
P21
P10
11
23
P20
22
P22
21
P23
25
20
26
9
19
8
P8
18
VDD
17
VSS
16
XI
27
15
28
7
14
29
6
12
5
RESn
12
VSS
BOEn
XO
P19
P17
P18
P16
P15
VSS
VDD
P14
P11
P13
RESET
Resetvertraging
(~50 ms)
Brown-outdetector
BOEn
Bus-sequencer
Cog
0
8192 x 32 RAM
CLKSEL
RESn
3
RC-oscillator
12 MHz / 20 MHz
SOFTRES
5
PLLENA
XI
OSCENA
OSCMODE
2
Kristaloscillator
DC 0 80 MHz(4 - 8
MHz met klok
PLL)
Klok PLL
1x, 2x, 4x, 8x,
16x,(16x moet 64 128 MHz zijn)
Klokselector
(MUX)
Hub
Cog schakelt in
Cog
6
Lock-bits (8)
SOFTRES
PLLENA
OSCENA
OSCMODE
CLKSEL
2
3
Configuratie
Register
Cog
1
Cog
7
8192 x 32 RAM
KLOK
Systeemteller
KLOK
3
XO
P12
Hub
Power-updetector
(~10ms)
VDD
Systeemteller
Cog
2
RAM,
ROM,configuratie,
besturing
Cog
5
Cog
3
Cog
4
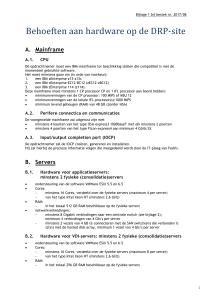
Hub- & Cog-interactie
fig. 1
20
eTech - NUMMER 3
I/O
Pins
Het gemeenschappelijke kenmerk is een enkele
processor ondersteund door een gespecialiseerde,
toepassingsgerichte logica, die functies heeft zoals
Pulse Width Modulation-uitvoer en pulstellerinvoer.
De Propeller van Parallax staat voor een grote
verandering in de filosofie achter ontwerpen. Dit
apparaat bevat acht 32-bits processoren of ‘COG's’
met minimale ondersteunende logica en alleen de
meest fundamentele I/O-hardware (fig.1). Een
eerste reactie op deze indeling zou kunnen zijn:
‘Geweldig, ik kan dat neurale netwerkproject
implementeren waarbij iedere COG in principe
hetzelfde programma draait’.
Hoewel zuivere parallelle verwerking inderdaad een
goede toepassing kan zijn voor de Propeller, geloof
ik niet dat dit de belangrijkste drijfveer achter het
ontwerp was. Het idee is een elektronica-ontwerper
maximale controle te geven over het systeem van
randapparatuur in een specifieke toepassing. U kunt
nog steeds een enkele COG gebruiken waarop het
hoofdprogramma draait, en ondergeschikte taken
zoals seriële I/O uitbesteden aan een andere COG
wanneer dat wenselijk is. Dit is een fascinerende
eigenschap van het apparaat: de mogelijkheid
zichzelf te herconfigureren, aangestuurd door het
programma, om te voldoen aan de voorwaarden
op een bepaald moment en processen te stoppen
wanneer ze niet meer nodig zijn, misschien
zelfs processor-resources toe te wijzen aan een
hele andere taak. De processorklok wordt ook
aangestuurd door het programma, zodat het
stroomverbruik kan worden gereduceerd wanneer er
geen hoge snelheid nodig is bij het implementeren
van langzame I/O zoals RS-232.
De starterskit-hardware
De set bevat een zeer klein demobord volgebouwd
met verschillende I/O-verbindingen, waarvan enkele
zeer verrassend zijn: VGA-uitvoer naar een monitor,
TV-uitvoer, PS/2-toetsenbord en muis. De videouitvoer kan worden verzorgd omdat de centrale
resource-ROM van de chip de opzoektabel bevat van
een karaktergenerator. De enige ‘conventionele’ I/Opoort is USB, die komt vanaf de on-board FTDI-chip.
De UART-functie die dit apparaat bestuurt is natuurlijk
volledig in software geïmplementeerd en draait op
één van de COG's. Alle communicatie met de IDEsoftware op de PC - Propeller Tool – gebeurt via de
USB-poort. Dit is een seriële EEPROM on-board die
met de Propeller communiceert via een I2C-bus die,
u raadt het al, is geïmplementeerd in software die
draait op een COG. Het biedt niet-vluchtig geheugen
voor gebruikersprogramma's. Deze I/O-routines
worden geladen vanaf de systeem-ROM bij een
reset, waardoor programma's kunnen worden
gedownload vanaf de PC of vanaf de EEPROM, maar
worden afgesloten voordat het programma van de
gebruiker wordt uigevoerd. Als uw programma deze
I/O-resources nodig heeft, dan moet hij deze laden
en COG('s) toewijzen waar nodig. Dit kan eerst een
beetje vreemd lijken, maar waarom zou u toestaan
dat ongebruikte resources geheugenruimte in beslag
nemen terwijl u ze niet nodig heeft?
Propeller Tool
De IDE in de starterskit heet Propeller Tool en
biedt de mogelijkheid voor programmabewerking,
compilatie van de hogere programmeertaal Spin en
downloaden naar het demobord. U heeft de optie
om te programmeren in Spin, assembleertaal of een
combinatie van beide. Uiteraard biedt de assembler
efficiëntere en snellere verwerking, dus er is sprake
van het gebruikelijke compromis tussen snellere
ontwikkeling en snellere verwerking.
Het bewerkingsvenster is zeer kleurrijk en de
automatische toewijzing van verschillende kleuren
aan codeblokken helpt bij het begrijpen van de
programmastructuur. Er zijn twee opties voor
downloaden en uitvoeren: u kunt compileren en
uitvoeren in COG RAM of compileren en daarna naar
een EEPROM sturen, van waaruit het automatisch
wordt geladen in de RAM door de bootloader van
het apparaat. De eerste is de beste optie voor
ontwikkeling, omdat alleen niet-vluchtig geheugen
wordt overgedragen als de code werkt.
gebruik van het demobord
Om enkele van de belangrijkste eigenschappen van
Propeller-programmeren te laten zien, is een taak
gemaakt met de snelheidscontrole van een kleine
DC-motor met behulp van PWM. Twee drukknoppen
zorgen voor de invoer van Speed Up en Speed
Down. Het aandrijfvermogen van de I/O-poorten is
onvoldoende voor de gebruikte motor, daarom is er
een H-Bridge-circuit gebouwd met de helft van een
L293D quad driver chip. Deze werd op het proefbord
gemonteerd, samen met twee ‘tact’-schakelaars,
afstopweerstanden en ontkoppelcondensatoren
(zie de afbeelding op pagina 23). U kunt zien dat de
D-variant van deze chip is gebruikt, die ingebouwde
beveiligingsdiodes heeft voor het aansturen van
inductieve belasting. Alleen de poorten 0 tot en met
7 van de mogelijke 32 poorten van de Propeller zijn
beschikbaar voor de gebruiker, de andere poorten
zijn verbonden met EEPROM-bussen etc. op dit
demobord. De Propeller is een
+3,3 V-apparaat, hoewel gestabiliseerde voedingen
van zowel +3,3 V als +5 V beschikbaar zijn. Dit houdt
in dat de logica van de L293D werkt met de +3,3
V-voeding, terwijl de afzonderlijke voedingspin voor
de motor is verbonden met de +5 V. Een kleine
maar zeer handige eigenschap is de aarde of 0
V-pin die de poolklem van de aansluiting voor de
oscilloscoop krijgt.
Programmeren in Spin
In schema 1 (zie pagina 22) ziet u een mogelijke
oplossing voor het programma dat de motor
aanstuurt. Het is geen optimale oplossing, maar
laat enkele van de belangrijkste eigenschappen
van Propeller-programmeren zien. Het doel is twee
COG's te gebruiken: één die de PWM-uitvoer
aanstuurt met een 'mark/space ratio' die wordt
ingesteld met de variabele Ratio, de tweede
controleert de invoer van de twee drukknoppen en
stelt de waarde van Ratio in. De PWM-frequentie
moet 1kHz zijn.
De CON-statements stellen twee
systeemconstanten in en regelen de kloksnelheid.
Wij hebben gekozen voor een 20 MHz-klok zodat
de interne PLL-multiplier is ingesteld op 4 op basis
van het 5 MHz-kristal dat met het bord wordt
meegeleverd. Vervolgens stellen de VAR-statements
de algemene variabelen: Ratio zoals hierboven
vermeld, Period en Stack die stack-ruimte toewijst
voor de tweede COG.
De eerste gemeenschappelijke methode, PUB Main,
voert de gebruikelijke initialisatietaken uit, inclusief
het instellen van de initiële waarde van Ratio gelijk
aan 50% PWM. Iedere COG heeft een eenvoudige
‘Count/Capture Unit’ die is gemaakt van enkele
registers en wat stukjes logica. Er zijn twee identieke
counters, A en B, die beide bestaan uit drie registers,
CTR, FRQ en PHS. CTR stelt de operationele modus
in, PHS is de accumulator die de huidige waarde
bevat en FRQ wordt wanneer nodig toegevoegd aan
PHS. Hier wordt counter A gebruikt. Eerst wordt het
CTRA-register ingesteld om de PWM-modus en bit
31 van PHSA die is verbonden met uitvoerpoort 0 te
selecteren. FRQA wordt ingesteld op 1 zodat PHSA
met één wordt verhoogd voor iedere cyclus van
de systeemklok.
Vervolg op pagina 22 >
eTech - NUMMER 3
21
RECENSIE
‘’
‘’
‘’
‘’
RECENSIE
**************************************************************
* Simple DC motor speed controller using counters for timing *
*
PWM mark/space ratio from 0 to 100%
*
**************************************************************
‘’Port 0 = PWM output
‘’Port 1 = Speed Up button input
‘’Port 2 = Speed Down button input
CON
_clkmode = xtal1 + PLL4X
_clkfreq = 20_000_000
VAR
word Ratio
word Period
long Stack[9]
‘Ratio = PWM pulse width
‘Period = PWM period
‘Make stack space for COG 1
PUB Main
‘’Initialisation of ports, counters and program start
Ratio := 10000
‘Initial PWM 50%
Period := 20000
‘Set PWM period
ctra[30..26] := %00100
‘Configure Counter A to NCO/PWM mode
ctra[5..0] := %00000
‘Direct Counter APIN to Port 0
frqa := 1
‘Set counter increment to 1
dira[0..2] := %100
‘Set Ports 0 = output, 1 & 2 = input
cognew(Buttons, @Stack)
‘Start COG 1 running Buttons routine
Toggle
‘COG 0 runs PWM generator routine
PUB Toggle | Time
‘’COG 0 produces PWM signal with pulse width set by variable Ratio
Time := cnt
‘Set base time from System Counter
repeat
‘Repeat next 3 lines forever
phsa := -Ratio
‘Load negated Pulse width into PHS
Time += Period
‘Time = Time + Period
waitcnt(Time)
‘Wait for interval set by Time
PUB Buttons | Width
‘’COG 1 monitors two pushbuttons to derive value for Ratio
repeat
‘Repeat next 8 lines forever
Width := Ratio
waitpne(%110, %110, 0)
‘Wait for button press
if ina[1] == 0
‘If Speed UP button pressed
Width := Width + 1 <# Period
‘then increment Width to max Period
else
‘Speed DOWN button pressed
Width := Width - 1 #> 0
‘so decrement Width to min 0
Ratio := Width
waitcnt(6000 + cnt)
‘Wait before checking buttons again
Schema 1. SPIN-broncode voor het PWM-demonstratieprogramma
22
eTech - NUMMER 3
< Vervolg van pagina 21
Nu komt de eerste interessante instructie:
COGNEW. Deze instructie lanceert de tweede
COG. Tot dit moment heeft COG 0 alles gedaan,
de bootloader geactiveerd en daarna het eerste
deel van ons programma. COGNEW vertelt hem
de gemeenschappelijke methode-knoppen in de
volgende vrije COG te laden, in dit geval COG 1, en
activeert hem. Zodra dit is gebeurt activeert het de
Toggle-methode en voert deze vanaf dit moment uit.
Een eigenschap die bijzonder is voor de Propeller
is het delen van de 32 GPIO-poortlijnen door alle
processoren. Iedere COG heeft zijn eigen Port
Direction-register, waarvan alle uitvoer wordt ge-‘ORed’ met het register van de volgende COG (zie fig.1
op pagina 20). Een COG waarvoor een uitvoerpoort
nodig is, moet de juiste bit in zijn Direction-register
instellen op een logische 1. Zodra dit is ingestelt
zorgt het ervoor dat de bijbehorende uitvoer van het
COG I/O-register de I/O-pin aanstuurt. Er moet goed
op worden gelet dat de twee COG's niet proberen
dezelfde poortlijn te gebruiken voor de uitvoer,
omdat het programma dan niet werkt zoals het zou
moeten! De poortinvoer is volledig onafhankelijk
en iedere COG kan op ieder moment de status van
iedere poort lezen. Een COG kan zijn eigen uitvoer
controleren en ook zien wat andere COG's doen op
poortpinnen die zij hebben ingesteld als uitvoer.
De Propeller heeft geen interrupt-systeem,
daarom zijn er een aantal Wait-instructies die
ervoor zorgen dat de uitvoer van het programma
wordt onderbroken tot een bepaalde gebeurtenis
plaatsvindt. WAITCNT stelt de uitvoer uit voor
een bepaald aantal cycli van de systeemklok
door de doelwaarde te vergelijken met de
waarde van de systeem-counter CNT.
In PUB Toggle wordt PHSA geladen
met een negatieve (twee-complement)
waarde van Ratio. Dit stelt bit 31 in, of het
‘signaal-bit’ van PHSA naar een logische
1. Als die bit wordt verbonden met poort
0, wordt de PWM-uitvoer ook hoog. PHSA
wordt nu automatisch verhoogd met de
systeemkloksnelheid door FRQA eraan toe te
voegen. Na de Ratio-klokcycli wordt PHSA nul en bit
31 verandert in een logische 0. Dit is het einde van
de PWM-puls. Terwijl dit allemaal gebeurt, wordt
COG ingesteld in de WAITCNT-statement voor
de duur van Period. Natuurlijk blijft PHSA omhoog
gaan, maar het einde van de variabele Period wordt
bereikt lang voordat PHSA een waarde krijgt die bit
31 weer instelt op hoog. Wanneer WAITCNT afloopt
wordt de cyclus herhaald, waarbij PHSA de waarde
van –Ratio krijgt. Op deze manier hebben we meer
parallelle programmauitvoer toegevoegd, door de
counter de pulsduur te laten bepalen, terwijl het
COG-programma de periode onafhankelijk instelt. Dit
is de manier waarop de PWM-golfvorm op poort 0
wordt gegenereerd door Toggle.
De WAITPNE-instructie in de Buttons-methode
wacht totdat poort 1 of poort 2 (of beide) een
logische 0 worden. Met andere woorden, het wacht
totdat er een knop wordt ingedrukt. De charme van
de Wait-instructies is dat de COG-uitvoer wordt
uitgesteld waardoor het energieverbruik met meer
dan 85% wordt verminderd. U kunt zien dat de COG
die Buttons uitvoert de meeste tijd ‘slaapt’ en alleen
wakker wordt wanneer dat nodig is. De max- (<#) en
min- (#>) statements in Buttons leveren de bovenen benedengrenzen van Ratio.
Componentenlijst
RS stocknummer.
32330 Propeller-starterskit
405-571
L293DNE Quad half-bridge drive
526-868
Tact-drukknopschakelaar
479-1390RE280
DC-motor
238-9709
Versnellen
Normaal gesproken zou u verwachten dat
programma's die worden uitgevoerd door
een on-board interpreter, in dit geval SPIN,
langzamer zijn dan die in een interne assembler.
De unieke architectuur van de Propeller lost dit
snelheidsprobleem tot op zekere hoogte op. De
reden hiervoor is dat gebruikers-SPIN-code is
opgeslagen in een gedeelde centrale RAM terwijl
iedere COG de interpreter uitvoert in zijn eigen
lokale geheugen. De hub biedt toegang tot centrale
resources in een nauwkeurige tijdsequentie en
een bepaalde COG kan worden onderbroken om
op zijn beurt te wachten. Machinecode van de
assembler wordt opgeslagen en uitgevoerd in het
lokale geheugen van de COG wat resulteert in een
aanzienlijke verhoging van de bewerkingssnelheid.
Om te lezen
Programming and Customizing the Multicore
Propeller Microcontroller
Shane Avery et al ISBN 978-0-07-166450-9
McGraw Hill
Meer informatie
online...
Een volledige versie van deze recensie,
samen met SPIN-broncodebestanden, is
beschikbaar op www.rsonline.nl/etech
of www.rsonline.be/etech
eTech - NUMMER 3
23