Het Bosch Rexroth Drive & Controls systeemhuis
1
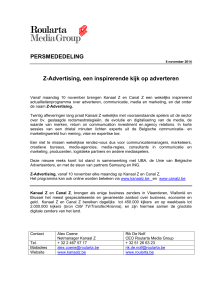
IndraDrive M
Compact en Krachtig
10
IndraDrive M
Servodyn-D
DIAX04
Concurent
A/dm³
8
6
4
2
0
14
38
85
120
Type current
2
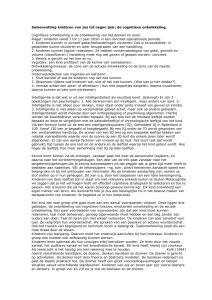
IndraDrive M
Besturings gedeelte – Prestaties
ECODRIVE03
300%
DIAX04
IndraDrive Advanced
100%
40%
Performance
3
Veilig gebied
Veilig absoluut gebied
Veilig
Absoluut gebied
Position 1
Position 2
In een gecontroleerde
bedrijfmodus bestaat er de
mogelijkheid om met een
gereduceerde snelheid of afstand
te bewegen.
Additioneel is het mogelijk op een
veilig absoluut gebied te
definiëren (in combinatie met een
absoluutgever in de motor en
referentie schakelaars).
Bij het verlaten van het veilige
gebied (door welke oorzaak dan
ook) wordt de aandrijving
stilgezet.
4
IndraDrive
Veiligheidstechniek - Certificaat
5
Wat zegt de norm EN 954-1 over beveiliging en serieschakeling
Noodstop
Wordt in serie geschakeld
Een fout in een noodstopcontact wordt daarom gedetecteerd.
Hek
Verhindering van aanloop machine als een hek open
Bijgevolg moeten noodstop- en hekbewakingsfuncties afzonderlijk worden
bewaakt.
Over veiligheidscategorie 3 zegt de norm (EN 954-1, 6.2.4 categorie 3)
Als hekschakelaars in serie geschakeld worden, worden niet alle fouten
gedetecteerd. Om alle fouten te kunnen detecteren, mag er altijd slechts één hek
geopend zijn of moet elk hek afzonderlijk gecontroleerd worden.
Zo wordt wel voldaan aan de eisen van veiligheidscategorie 3, maar als te voorzien
is dat meerdere hekken gelijktijdig geopend zijn, is dit voorbeeld niet van
toepassing.
Daarom is serieschakeling bij cyclisch bediende hekken niet toegelaten
Bron:internet www.pilz.nl
6
Beweging
Stilstand
Actuele stand van techniek in verschillende situaties
Afschakelen van de primaire Power
Wachttijd, snelle veroudering
Beveiligingen in de motorleidingen
Kosten, Plaats
Positioneren naar een veilige positie
Tijdverlies
Afschakelen van vermogensdeel in
de versterker
Alleen maar veilige stilstand
Reducering van de spanning
Transformator (kosten, plaats),
vermogensafname
Separaat meetsysteem en
bewakingsrelais
Kosten, plaats, langere
reactietijden
„3-delige toestemmingniveau“
Beduidend langere reactietijden,
geen veiligheid bij hoog
dynamische toepassingen.
7
Draairichting
Veilige draairichting
In een gecontroleerde bedrijfmodus
bestaat er de mogelijkheid om met een
gereduceerde snelheid of afstand te
bewegen.
v
Additioneel op deze functionaliteit kan
nog een veilige draairichting ingegeven
worden (rechts, links).
0
t
Het alsnog aanvragen door een
gebruiker van een andere draairichting
heeft tot gevolg dat de aandrijving
wordt stilgezet.
8
Veilig stilzetten
Veilig bewaakte ramp naar stilstand
n
Remmen op maximale kracht
(stroom)
Remmen volgens een gedefinieerd
patroon
Synchroon remmen (bij gekoppelde
assen)
t1
Vrijloop
Bij het niet bereiken van de stilstand na t1 wordt het vermogensdeel alsnog
afgeschakeld.
9
Veiligheidsfuncties in de drive
Aansluiting van veiligheidsfuncties 1
Totaal vier redundante ingangen ter beschikking van veiligheidsfuncties:
Aandrijfversterker
Besturing
PLC/PC
SERCOS, Veldbus
besturingsdeel
Vermogensdeel
E/A
Kanaal 1
Prosessor
M
E/A
Veiligheidsbus
I/Okoppeling
Kanaal 2
Co-Prosessor
SI aktiv
Kanaal 1
SI aktiv
Kanaal 2
SI-Option
In-uitgangen
24 Vdc
10
Veiligheidsfuncties in de drive
Aansluiting van veiligheidsfuncties 2
Alternatief:
SERCOS, Veldbus,
Geen Veiligheidsbus!
Besturing
V
E
L
D
B
U
S
S
E
R
C
O
S
Kanaal 1
S
E
R
C
O
S
v
E
L
D
B
U
S
aandrijfversterker
Besturings Vermogens
deel
deel
Kanaal 1
Processor
I/O
M
Kanaal 2
Co-Processor
I
/
O
Veiligheidsbus
I/OInterface
SI
actief
SI-Optie
Kanaal 1
Kanaal 2
SI
actief
Aansluiting en terugmelding
24 V I/O
11
Realisatie programmering software
Inbedrijfname-Assistent in Drive Top
Te gebruiken:
1. Inbedrijfname
2. Diagnose
3. Optimalisatie
Benodigdheden:
DriveTop 16
Dubbele ingaven
(redundant)
12
Proceskrachten en signalen
Procesvariabelen eisen en korte reactietijd
Proces
Instelwaarde
Proceskracht
Variabele Regelaar
Krachtinstelling
Motioncontrol
Logiccontrol
Processignaal
Botsingsbewaking
Drukmarkering regeling
Afstandsensor
etc..
13
Veilige beweging
Veilige gereducerde beweging of afstand
In een gecontroleerde bedrijfmodus bestaat
er de mogelijkheid om met een
gereduceerde snelheid of afstand te
bewegen. Zeker met het opstarten en
inleren van de machine geeft dit een
enorme flexibiliteit.
v
t0
t1
t
Indien deze waarden door een (onbekende)
oorzaak overschreden wordt, dan wordt de
aandrijving alsnog gestopt.
v, s
Deze grenswaarden zijn met wachtwoorden
beveiligd
t
14
Uitvoeringen in verschillende oplossingen (cat. 0,1 of 2)
Startblokkering (conventioneel)
Stop Categorie 0*
Twee kanalig onderbreken van
de voeding (Power)
Gecertificeerd volgens
Categorie 3, EN 954-1
Veiligheids in en uitgangen (modern)
Stop in de Categorie 1 en 2*
flexibeler in verwerking
Gecertificeerd volgens Categorie 3,
EN 954-1
* volgens EN 60204-1
15
Stopcategorieen
Beveiliging tegen onverwachts starten van aandrijving
Startblokkering (Stopcategorie 0*)
v
Vrijloop van de motor
Motor is gescheiden van het vermogensdeel
t
t0
Veilige stop (Stopcategorie 1*)
Bewaakt (met gebruikmaking van elektronica) stilzetten
van de aandrijving
Stilstand zonder koppel
Motor is gescheiden van het vermogensdeel
v
t0
t1
t
v, s
t0
t
t1
Veilige stilstand (Stopcategorie 2*)
Bewaakt (met gebruikmaking van elektronica) stilzetten
van de aandrijving
Motor is niet gescheiden van het vermogensdeel
Houdt de motor in positie terwijl alle regelfuncties
gehandhaafd blijven.
* volgens EN 60204-1
16