Samenvatting Besturingssystemen
Vloeberghs Sam
2 Toegepaste Informatica 4
2007-2008
BESCHRIJVING EN BESTURING VAN PROCESSEN...................................................................................4
WAT IS EEN PROCES?.................................................................................................................................................4
Processen en besturingsblokken......................................................................................................................4
PROCESTOESTANDEN..................................................................................................................................................4
Creëren en beëindigen van processen..............................................................................................................4
Procesmodel met 2 toestanden.........................................................................................................................5
Procesmodel met 5 toestanden.........................................................................................................................6
Redenen voor het opschorten van processen:..................................................................................................7
BESCHRIJVING VAN PROCESSEN....................................................................................................................................7
Beheersstructuren in het besturingssysteem....................................................................................................7
Beheersstructuren voor processen...................................................................................................................7
PROCESBESTURING.....................................................................................................................................................9
Uitvoeringsmodi...............................................................................................................................................9
Creëren van processen.....................................................................................................................................9
Wisselen van processen..................................................................................................................................10
Uitvoering van het besturingssysteem............................................................................................................11
PROCESBEHEER IN UNIX SVR4..............................................................................................................................12
Procestoestanden...........................................................................................................................................12
Beheer van processen.....................................................................................................................................12
THREADS , SMP EN MICROKERNELS.........................................................................................................14
PROCESSEN EN THREADS...........................................................................................................................................14
Multithreading................................................................................................................................................14
Functionaliteiten van threads........................................................................................................................15
Voorbeeld : Adobe Pagemaker......................................................................................................................16
Threads op gebruikersniveau en op kernelniveau.........................................................................................16
Andere indelingen..........................................................................................................................................17
SYMMETRISCHE MULTIPROCESSING..............................................................................................................................17
Architectuur van SMP....................................................................................................................................18
Ontwerpen van besturingssystemen voor SMP..............................................................................................19
MICROKERNELS.......................................................................................................................................................19
Architectuur van een microkernel..................................................................................................................19
Voordelen van een microkernel.....................................................................................................................20
Prestaties van een microkernel......................................................................................................................20
Ontwerp van een microkernel........................................................................................................................21
BEHEER VAN THREADS EN SMP IN SOLARIS...............................................................................................................22
Architectuur met multithreading....................................................................................................................22
Motivering......................................................................................................................................................23
Interrupts als threads.....................................................................................................................................23
BEHEER VAN PROCESSEN EN THREADS IN LINUX...........................................................................................................23
Taken in Linux................................................................................................................................................23
Threads in Linux............................................................................................................................................24
GELIJKTIJDIGHEID : WEDERZIJDSE UITSLUITING EN SYNCHRONISATIE..................................25
PRINCIPES VAN GELIJKTIJDIGHEID...............................................................................................................................25
Een eenvoudig voorbeeld...............................................................................................................................26
Aandachtspunten voor het besturingssysteem................................................................................................27
Interactie van processen................................................................................................................................27
Vereisten voor wederzijdse uitsluiting...........................................................................................................28
WEDERZIJDSE UITSLUITING : HARDWAREONDERSTEUNING................................................................................................28
Uitschakelen van interrupts...........................................................................................................................28
Speciale machine instructies..........................................................................................................................29
SEMAFOREN............................................................................................................................................................30
Wederzijdse uitsluiting...................................................................................................................................31
Implementatie van semaforen........................................................................................................................31
MONITOREN...........................................................................................................................................................31
Monitor met signal.........................................................................................................................................32
GELIJKTIJDIGHEID : DEADLOCKS EN UITHONGERING.....................................................................33
BEGINSELEN VAN DEADLOCK.....................................................................................................................................33
Herbruikbare hulpbronnen............................................................................................................................33
Verbruikbare hulpbronnen.............................................................................................................................33
Condities voor deadlock.................................................................................................................................34
VOORKOMEN VAN DEADLOCK....................................................................................................................................35
Wederzijdse uitsluiting...................................................................................................................................35
Vasthouden en wachten..................................................................................................................................35
Geen preëmptieve onderbreking....................................................................................................................36
Cirkelvormig wachten....................................................................................................................................36
VERMIJDEN VAN DEADLOCK......................................................................................................................................36
Weigeren van een nieuw proces.....................................................................................................................37
Weigeren om bronnen toe te wijzen...............................................................................................................37
DETECTEREN VAN DEADLOCK....................................................................................................................................38
Algoritmen voor detecteren deadlock............................................................................................................38
Herstel............................................................................................................................................................39
GEÏNTEGREERDE AANPAK VAN DEADLOCK....................................................................................................................39
PROBLEEM VAN DE DINERENDE FILOSOFEN...................................................................................................................40
MECHANISMEN VOOR GELIJKTIJDIGHEID IN UNIX........................................................................................................41
Pijpen.............................................................................................................................................................41
Berichten........................................................................................................................................................41
Gedeeld geheugen..........................................................................................................................................41
Semaforen.......................................................................................................................................................41
Signalen..........................................................................................................................................................41
GEHEUGENBEHEER.........................................................................................................................................42
VEREISTEN VOOR GEHEUGENBEHEER...........................................................................................................................42
Relocatie.........................................................................................................................................................42
Bescherming...................................................................................................................................................43
Delen..............................................................................................................................................................43
Logische indeling...........................................................................................................................................43
Fysieke indeling.............................................................................................................................................43
PARTITIONEREN VAN GEHEUGEN.................................................................................................................................44
Vaste indeling van Partities...........................................................................................................................44
Dynamische indeling van partities.................................................................................................................45
Buddysysteem.................................................................................................................................................46
Relocatie.........................................................................................................................................................47
PAGINEREN.............................................................................................................................................................48
SEGMENTEREN........................................................................................................................................................50
VIRTUEEL GEHEUGEN....................................................................................................................................51
HARDWARE EN BESTURINGSSTRUCTUREN.....................................................................................................................51
Lokaliteit en virtueel geheugen......................................................................................................................51
Pagineren.......................................................................................................................................................52
Segmenteren...................................................................................................................................................58
Gecombineerd pagineren en segmenteren.....................................................................................................60
Bescherming en delen....................................................................................................................................60
BESTURINGSSYSTEEMSOFTWARE.................................................................................................................................61
Strategie bij ophalen (fetch policy )...............................................................................................................61
Strategie bij plaatsing....................................................................................................................................61
Strategie bij vervanging.................................................................................................................................62
Beheer van de residente set............................................................................................................................63
Opschoon strategie.........................................................................................................................................66
Toezicht op de procesbelasting......................................................................................................................66
Beschrijving en besturing van processen
Wat is een proces?
Processen en besturingsblokken
We kunnen een proces voorstellen als een entiteit die bestaat uit een aantal elementen. Twee
essentiële:
1. de programma code
2. verzameling van gegevens die bij de code hoort
Een proces is gekenmerkt door een aantal elementen uit het procesbesturingsblok:
o Identificatienummer
o Toestand
o Prioriteit
o Programmateller
o Geheugenwijzers
o Contextgegevens
o IO-toestandsinformatie
o Beheersinformatie
Het procesbesturingsblok moet voldoende informatie bevatten om een proces dat uitgevoerd wordt te
kunnen onderbreken en op een later moment gewoon terug te kunnen starten alsof het nooit
onderbroken werd. Het procesbesturingsblok is het belangrijkste hulpmiddel voor een
besturingssysteem bij de ondersteuning van verschillende processen, waardoor multiprocessing
mogelijk wordt.
PROCES = PROGRAMMACODE & BIJHORENDE GEGEVENS + procesbesturingsblok
Procestoestanden
We kunnen het gedrag van een individueel proces beschrijven aan de hand van de volgorde van
instructies die voor dat proces worden uitgevoerd: deze volgorde wordt een spoor ( trace ) van het
proces genoemd.
Er kunnen meerdere processen tegelijk uitgevoerd worden. De toedeler ( dispatcher ) wijst de
processor wisselend toe aan de verschillende processen. De sporen van deze verschillende processen
worden dus ‘ verweven ‘
Creëren en beëindigen van processen
Creëren van processen
Nieuwe batchtaak
Interactieve aanmelding
Gecreëerd door het
besturingssysteem om een
dienst te verzorgen
Verwerkt door een bestaand
proces
Besturingssysteem ontvangt een jobbesturingsopdracht. Als het
besturingssysteem bereid is de nieuwe taak uit te voeren, zal het
de volgende reeks opdrachten lezen .
Een gebruiker van het werkstation meld zich aan bij het systeem
Het besturingssysteem kan een proces aanmaken om een bepaalde
dienst af te werken waar de gebruiker om vraagt: bijvoorbeeld
printen
Een bestaand proces kan kind processen aanmaken die bepaalde
bewerkingen afzonderlijk afwerken en het moederproces
ondersteunen
Beëindigen van processen
Normale voltooiing
Tijdslimiet overschreden
Onvoldoende geheugen
beschikbaar
Overtreding
geheugengrens
Beschermingsfout
Rekenkundige fout
Tijd verstreken
I/O-fout
Ongeldige instructie
Geprivilegieerde instructie
Onjuist gebruik van
gegevens
Ingreep van de gebruiker
of het besturingssysteem
Beëindiging van het
ouderproces
Verzoek van het
ouderproces
Proces roept een dienst aan om te melden dat uitvoering voltooid
Proces wordt afgesloten omdat het zijn uitvoeringstijd heeft
overschreden
…
Proces probeert toegang te krijgen tot geheugenlocaties die niet voor
hem bestemd zijn
Het proces probeert iets te doen waar het geen rechten voor heeft,
bijvoorbeeld schrijven naar een alleen-lezen bestand.
Delen door nul,…
Het proces heeft langer gewacht op een gebeurtenis als aangegeven
Er is een fout opgetreden bij de invoer of uitvoer van gegevens
naar/van het proces
Proces probeert instructie uit te voeren die niet bestaat
Proces probeert gereserveerde instructie uit te voeren.
De gegevens zijn mogelijk niet van het juiste type of zijn nog niet
geinitialiseerd.
De gebruiker of besturingssysteem roept een instructie aan om het
proces te beëindigen
Als het ouderproces beëindigt wordt , worden meestal ook de
kindprocessen beindigd
Het ouderproces kan verzoeken aan een kindproces om er mee te
stoppen.
Procesmodel met 2 toestanden
Procesmodel met 5 toestanden
Actief ( running )
Gereed ( ready)
Geblokkeerd ( blocked )
Nieuw ( new )
Einde ( exit )
Het proces dat op deze moment wordt uitgevoerd. In dit hoofdstuk gaan
we uit van een single core processor => max 1 proces in deze toestand.
Een proces dat direct kan worden uitgevoerd als het daar de gelegenheid
voor krijgt.
Een proces dat niet kan worden uitgevoerd totdat er zich een bepaalde
gebeurtenis heeft afgespeeld.
Een proces dat onlangs is aangemaakt maar zich nog niet in de ready
state bevindt. Het is dus nog niet in het werkgeheugen geladen maar
bevat al wel een procesbesturingsblok.
Een proces dat door het besturingssysteem wordt ontslagen uit de groep
uitvoerbare processen.
Opgeschorte processen ( proces dat zich NIET in het hoofdgeheugen bevindt )
Soms is er het probleem dat de processor sneller is dan I/O dus alle processen kunnen wachten op I/O.
De oplossing hiervoor is het ‘swappen’ : dit is processen geheel of gedeeltelijk naar de schijf
verplaatsen om hoofdgeheugen vrij te maken. Dit zorgt voor 2 nieuwe toestanden:
Geblokkeerd – opgeschort
Gereed - opgeschort
Het proces bevindt zich in het secundaire geheugen en wacht op een
gebeurtenis
Het proces bevindt zich in het secundaire geheugen maar is
beschikbaar voor uitvoering zodra het in het hoofdgeheugen is
geladen.
Redenen voor het opschorten van processen:
Swapping
Andere reden van het
BS
Verzoek van
interactieve
gebruiker
Timing
Verzoek van het
ouderproces
Het besturingssysteem moet voldoende hoofdgeheugen vrijmaken voor het
binnenhalen van een proces dat gereed is om te worden uitgevoerd.
Het besturingssysteem kan een achtergrond of hulpproces opschorten of een
proces dat ervan wordt verdacht een probleem te veroorzaken
Een gebruiker kan de uitvoering van een programma opschorten om fouten
te zoeken of om een bron te gebruiken
Een proces kan periodiek worden uitgevoerd ( bijvoorbeeld een proces voor
administratie of systeembewaking ) en kan worden opgeschort terwijl wordt
gewacht op de volgende tijdsinterval
Een ouderproces kan de uitvoering van een kindproces opschorten om het te
onderzoeken of te wijzigen.
Beschrijving van processen
Het besturingssysteem bestuurt gebeurtenissen binnen het computersysteem en verzorgt het
inroosteren ( scheduling ) en de toedeling ( dispatching ) van processen voor uitvoering door de
processor, wijst bronnen toe en reageert op vragen van gebruikersprogramma’s.
Besturingssysteem = Entiteit die het gebruik van systeembronnen door processen beheert
Beheersstructuren in het besturingssysteem
Het BS moet informatie bezitten over de huidige status van elk proces/bron. Het BS maakt en
onderhoudt tabellen met informatie over elke entiteit die het beheert.
Geheugentabellen
- de toewijzing van hoofdgeheugen aan processen
- de toewijzing van secundair geheugen aan processen
- eventuele beschermingsattributen ( machtigingen v processen? )
- alle informatie die nodig is voor het beheren van het virtueel geheugen.
I/O tabellen
- informatie voor het beheren van I/O-kanalen en – apparaten.
Bestandstabellen
- informatie over het bestaan van bestanden, locatie, status en andere attributen.
Procestabellen
- informatie voor het beheren van processen. ( volgende puntje )
- 1 entry per proces = bevat identificatie nummer vh proces.
Beheersstructuren voor processen
Proceslocatie
De locatie van een procesbeeld is afhankelijk van het geheugenbeheersysteem dat wordt gebruikt. In
het eenvoudigste geval wordt het procesbeeld bijgehouden als een aaneengesloten blok geheugen. Dit
blok is opgeslagen in het secundaire geheugen, doorgaans op schijf.
Het besturingssysteem moet dus de locatie van elk proces op schijf kennen en moet voor elk proces
dat zich in het hoofdgeheugen bevindt, bovendien de locatie vh proces in het hoofdgeheugen kennen.
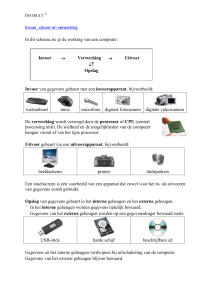
Procesbeeld:
Gebruikersgegevens
Gebruikersprogramma
Systeemstack
Procesbesturingsblok
Het deel van de gebruikersruimte dat kan worden gewijzigd. Dit kan
bestaan uit programmagegevens, een stackgebied voor de gebruiker en
programma’s die kunnen worden gewijzigd.
Het uit te voeren programma
Met elk proces zijn 1 of meer LIFO systeemstacks verbonden. Een stack
wordt gebruikt voor het opslaan van parameters en aanroepadressen voor
procedure- en systeemaanroepen.
Gegevens die het besturingssysteem nodig heeft voor het beheren van het
proces.
Procesattributen
We kunnen de informatie in het procesbesturingsblok groeperen tot drie algemene categorieën:
Procesidentificatie
- unieke numerieke identificatiecode
- gebruikersidentificatiecode
- ouderidentificatie
Processortoestandsinformatie
- Registers die zichtbaar zijn voor de gebruiker
- Stuur- en statusregisters
Programmateller
Conditiecodes
Statusinformatie
- Stackwijzers
Program Status Word ( PSW ) :
Een register of een verzameling registers die statusinformatie bevat. Bvb:
* EFLAGS register in Pentium Machines
Procesbesturingsinformatie
- Scheduling en toestandsinformatie
Procestoestand
Prioriteit
Scheduling informatie
Gebeurenis (code)
- Gegevensstructuur
- Communicatie tussen processen
- Procesprivileges
- Geheugenbeheer
- Eigendom en gebruik van bronnen.
Rol van het procesbesturingsblok
Elke procesbesturingsblok bevat alle informatie die het BS nodig heeft. De verzameling van
procesbesturingsblokken definieert de toestand van het besturingssysteem.
Procesbesturing
Uitvoeringsmodi
De meeste processors ondersteunen ten minste 2 uitvoeringsmodi:
De gebruikersmodus :
o Minder geprivilegieerd. Modus voor normale uitvoering van gebruikersprogramma’s
De systeem of kernel modus:
o Meer privileges. Modus voor uitvoering van kernelfuncties ( IO , proces , geheugen
beheer )
Standaardfuncties van de kernel van een BS:
Procesbeheer
Geheugenbeheer
I/O-beheer
Ondersteunende
functies
Creëren en beëindigen van processen
Inroosteren en toedelen van processen
Wisselen tussen processen
Synchroniseren van processen + communicatie
Beheren van PSB
Toewijzen van adresruimte
Swapping
Beheren van pagina’s en segmenten
Beheren van buffers
Toewijzen van IO-kanalen en apparaten aan processen
Afhandelen van interrupts
Administratie + toezicht
De reden voor het gebruik van twee modi is dat het besturingssysteem en de belangrijkste tabellen
moeten beschermd worden tegen verstoringen door gebruikersprogramma’s.
De processor weet in welke modus hij moet werken en naar welke modus hij moet veranderen door
bepaalde bits in het PSW dat de uitvoeringsmodus aanduidt. Deze bits worden veranderd als reactie op
bepaalde gebeurtenissen.
Creëren van processen
Als het besturingssysteem besloten heeft tot creatie van een nieuw proces dan kan het als volgt gaan:
1. Het BS wijst een unieke procesidentificatie toe aan het nieuwe proces
a. Nieuwe ingang bij de primaire procestabel
2. Het BS wijst ruimte toe aan het proces
a. Alle elementen van het procesbeeld
3. Het procesbesturingsblok moet worden geïnitialiseerd.
a.
4. De juiste koppelingen moeten worden ingesteld
5. Soms moeten andere gegevenstructuren worden gemaakt of uitgebreid.
Wisselen van processen
Wanneer moeten processen worden gewisseld
Een proceswisseling kan steeds optreden wanneer het besturingssysteem de besturing heeft
overgenomen van het proces dat op dit moment wordt uitgevoerd.
Mechanismen voor het onderbreken van de procesuitvoering:
Mechanisme
Oorzaak
Interrupt
Extern aan de uitvoering van het
huidige proces
Val
Verbonden aan de uitvoering van de
huidige instructie
Aanroep supervisor Expliciet verzoek
Gebruik
Reactie op een asynchrone externe
gebeurtenis
Afhandelen van een fout of een
uitzonderlijke conditie
Aanroep van een functie van het
besturingssysteem
Systeeminterrupts:
Interrupt
o Klokinterrupt
Het besturingssysteem bepaald of het actieve proces de maximale toegestane
uitvoeringstijd benut heeft. Zoja wordt er een ander proces geactiveerd.
o
I/O interrupt
Is een I/O actie een gebeurtenis waarop één of meerdere processen wachten dan brengt
het BS alle processen die hierop wachtten in de toestand Gereed , Gereed-opgeschort.
o
Geheugenfout
De processor krijgt een verwijzing naar een woord adres dat zich niet in het
hoofdgeheugen bevindt en zal het blok geheugen dat de verwijzing bevat naar het
hoofdgeheugen moeten brengen.
o
Bij een val controleert het besturingssysteem of de fout al dan niet fataal is. Is deze
fataal dan wordt het proces overgebracht naar de toestand Einde en treedt een
proceswisseling op
Val
Supervisoraanroep
Wisseling van modus
Als er een interrupt wacht dan doet de processor het volgende:
1. De processor stelt de programmateller in op het beginadres van de routine voor de
interruptafhandeling
2. De processor wisselt van gebruikersmodus naar kernelmodus, zodat de code voor de
interruptverwerking geprivilegieerde instructies kan bevatten.
De interruptafhandeling is meestal een kort programma dat enkele basistaken uitvoert die
samenhangen met een interrupt. Het stelt bijvoorbeeld de vlag of indicator die de aanwezigheid van
een interrupt signaleert, opnieuw in.
In de meeste BS leidt het optreden van een interrupt echter niet noodzakelijk tot een proceswisseling.
Het is mogelijk dat nadat de interruptafhandeling is uitgevoerd, de uitvoering van het actieve proces
wordt voortgezet.
Wisseling van procestoestand
Een volledig proceswisseling bestaat uit de volgende stappen:
1. Het opslaan van de context van het proces , inclusief de programmateller en andere registers
2. Het bijwerken van het PSB van het afgebroken proces
3. Het verplaatsen van het betreffende PSB naar de juiste wachtrij ( gereed , geblokkeerd ,.. )
4. Het selecteren van een ander uit te voeren proces.
5. Het bijwerken van het PSB van het geselecteerde proces
6. Het bijwerken van de gegevensstructuren voor het geheugenbeheer
7. Het terugbrengen van de context van dit proces naar de context zoals deze was op het moment
dat het geselecteerd proces het laatst uit de toestand Actief werd gewisseld.
Uitvoering van het besturingssysteem
Het besturingssysteem werkt hetzelfde als gewone computersoftware: het is een programma
dat wordt uitgevoerd door de processor.
Het besturingssysteem geeft de besturing vaak uit handen en is voor het terugkrijgen ervan
afhankelijk van de processor.
Procesloze kernel
De code van het besturingssysteem wordt
uitgevoerd als een afzonderlijke entiteit die
werkt in een geprivilegieerde modus
Uitvoering binnen gebruikersprocessen
Het uitvoeren van vrijwel alle software
van het besturingssysteem in de context
van een gebruikersproces. Hierbij wordt
het besturingssysteem vooral gezien als een
verzameling routines die het gebruikersproces
aanroept voor het verzorgen van diverse functies
die worden uitgevoerd binnen de omgeving van
het gebruikersproces.
Op processen gebaseerd besturingssysteem
Het besturingssysteem wordt geïmplementeerd
als een verzameling van systeem processen
(modules). Er zijn duidelijke interfaces tussen de
modules. De kernelsoftware wordt uitgevoerd
in kernelmodus. Dit is een goede aanpak in multi-
Procesbeheer in UNIX SVR4
Procestoestanden
User running
Kernel running
Ready to run , in
memory
Asleep in memory
Ready to Run ,
swapped
Sleeping , swapped
Preempted
Created
Zombie
Uitvoering in gebruikersmodus
Uitvoering kernelmodus
Gereed om te worden uitgevoerd zodra de kernel het proces inroosterd
Kan niet worden uitgevoerd totdat een gebeurtenis optreedt; het proces
bevindt zich in hoofdgeheugen ( geblokkeerd )
Het proces is gereed om te worden uitgevoerd, maar moet eerst naar het
hoofdgeheugen worden geswapped.
Het proces wacht op een gebeurtenis en is naar secundaire opslag geswapt.
Het proces keert terug van kernel naar gebruikersmodus, maar de kernel
onderbreekt het preemptief en voert een proceswisseling uit om een ander
proces in te roosteren
Het process is zojuist gecreëerd en is nog niet gereed om te worden
uitgevoerd
Het proces bestaat niet meer maar laat een record achter voor verwerking door
ouderproces
Beheer van processen
In Unix wordt een proces gecreëerd met de systeemaanroep fork() in de kernel:
1. het wijst een positie ( slot ) in de procestabel toe aan het nieuwe proces
2. Het wijst een unieke procesidentificatiecode toe aan het kindproces
3. het maakt een kopie van het procesbeeld van de ouder
4. Het verhoogt de tellers voor alle bestande die in het bezit zijn van het ouderproces om aan te
geven dat een extra proces deze bestanden nu ook in bezit heeft.
5. Het plaats het kindprocess in een toestand Ready to Run
6. Het geeft de identificatiecode van het kindproces terug aan het ouderproces en geeft waarde 0
aan het kindproces
Al deze bewerking worden uitgevoerd in kernelmodus bij het ouderproces. Als de kernel klaar is met
deze functies, dan kan hij één van de volgende bewerking uitvoeren, als onderdeel van het toedelen:
1. In het ouder proces blijven. De besturing gaat terug naar de gebruikersmodus op het punt na
de fork aanroep van ht ouderproces
2. De besturing overdragen aan het kindproces. De uitvoering van het kindproces begint op
hetzelfde punt in de code als het ouderproces, namelijk bij de return van de fork aanroep
3. De besturing overdragen aan een ander proces.
Threads , SMP en Microkernels
Processen en threads
Tot nu toe hebben we 2 proceskenmerken besproken:
1. Bezit van bronnen
a. Virtuele adresruimte wordt toegewezen voor de opslag van het procesbeeld
2. Inroosteren en uitvoering
a. Een proces is een uitvoeringspad door één of meer programma’s ( kan verweven
worden )
In de meeste BS vormen deze kenmerken de kern van een proces. Ze worden onafhankelijk behandeld
door het besturingssysteem.
Onderscheid:
Eenheid voor toedeling: thread of lichtgewicht proces
Eenheid voor bronbezit: proces of taak
Multithreading
Het besturingssysteem ondersteunt de mogelijkheid meerdere threads te gebruiken bij de uitvoering
van één proces.
Voorbeelden:
MS-DOS : 1 gebruikersproces,1 thread
UNIX : meerdere gebruikersprocessen , 1 thread per proces
WINDOWS : meerdere gebruikersprocessen , meerdere threads per proces
In een multithreading omgeving wordt een proces gedefinieerd als een eenheid voor brontoewijzing en
voor beveiliging.
Het volgende is verbonden met processen:
Virtuele adresruimte ( bevat het procesbeeld
Beveiligde toegang tot processors, andere processen , bestanden en I/O-bronnen
Een thread wordt gedefinieerd als een eenheid van uitvoering.
Het volgende is verbonden met threads :
Een uitvoeringstoestand ( Actief , Gereed , … )
Context ( opgeslagen als de thread niet uitgevoerd wordt )
Uitvoeringsstack
Statische opslagcapaciteit voor lokale variabelen per thread
Toegang tot het geheugen en de bronnen van het bijhorende proces(gedeeld door alle threads)
De grootste voordelen van threads hangen samen met de gevolgen voor de prestaties:
1. Minder tijd nodig om een thread te creëren dan om een proces te starten
2. Minder tijd nodig om een thread te beëindigen dan om een proces te beëindigen.
3. Minder tijd nodig om over te schakelen tussen twee threads binnen het zelfde proces
4. een efficiëntere manier van communicatie tussen threads: gedeeld geheugen en bestanden. Dit
zonder het activeren van de kernel
Voorbeeld : De File Server
Een nieuwe bestandsaanvraag = een nieuwe thread
Een file server krijgt veel bestandsaanvragen : de communicatie loopt snel ( creatie en het
beëindigen van de threads gaat snel )
Er is snelle en efficiënte communicatie nodig omdat de toegang tot de bestanden
gecoördineerd moet worden : Het is sneller om threads te gebruiken i.p.v. processen die
uitwisseling van berichten gebruiken.
Nog enkele algemene voorbeelden :
o
Werk op de voorgrond en achtergrond
- terwijl de gebruiker invoer geeft kan het programma deze invoer op de achtergrond verwerken ( opslaan ,
berekeningen maken , … )
o
Asynchrone verwerking
- Bijvoorbeeld het geregeld wegschrijven van de RAM-buffer naar schijf om eventueel gegevensverlies te
voorkomen
o
Uitvoeringssnelheid
- 1 thread kan de volgende gegevens lezen, terwijl een andere thread de vorige gegevens verwerkt.
o
Modulaire programma structuur
- Programma’s met uiteenlopende activiteiten , verschillende bronnen/uitvoer hebben zijn met threads
gemakkelijker te ontwerpen/implementeren
Functionaliteiten van threads
Sommige acties op het proces hebben invloed op ALLE threads van het proces: bijvoorbeeld:
• Opschorten : alle threads worden opgeschort .
• Beëindigen : alle threads worden beëindigt.
Threadtoestanden
Er zijn 4 basisbewerkingen met threads die samenhangen met een verandering van de threadtoestand :
Verwekken
Als een nieuw proces wordt verwerkt wordt er automatisch een nieuwe thread verwekt, welke op zijn
beurt nieuwe threads kan opwekken. => Gereed voor uitvoering
Blokkeren
Als de thread moet wachten op gebeurtenis => Geblokkeerd
Deblokkeren
Optreden van gebeurtenis => Gereed voor uitvoering
Beëindigen
Thread voltooid : registercontext + stacks worden ongedaan gemaakt.
Leidt het blokkeren van 1 thread tot het blokkeren van het volledige proces?
Synchronisatie van threads
Alle threads van een proces delen dezelfde adresruimte en andere bronnen , zoals open bestanden. Een
wijziging van een bron door een thread heeft invloed op de omgeving van de andere threads binnen
hetzelfde proces. Daarom is het noodzakelijk de activiteiten van de verschillende threads te
synchroniseren om te voorkomen dat ze elkaar storen of beschadigen.
Voorbeeld : Adobe Pagemaker
Zie boek
Threads op gebruikersniveau en op kernelniveau
Threads op gebruikersniveau
Al het thread -beheer wordt
uitgevoerd door de toepassing
De kernel is zich niet bewust
van het bestaan van threads.
Elk proces heeft zijn threadbibliotheek :
pakket van routines voor ULT-beheer
Voordelen:
Threadwisseling vereist geen privileges van kernel modus
Schedulingsalgoritme kan aangepast worden zonder scheduler van het BS te moeten
aanpassen
ULT’s kunnen uitgevoerd worden op elk BS : vereist geen aanpassing van onderliggende
kernel. De Threadbibliotheek bevindt zich op toepassingsniveau.
Nadelen:
Als de ULT een systeemaanroep doet wordt de thread geblokkeerd + ook alle andere threads
van hetzelfde proces
Bij een zuivere ULT is er geen voordeel van multiprocessing. Scheduler wijst processor toe
aan een proces : slecht 1 thread kan tegelijk uitgevoerd worden.
Threads op kernelniveau
Al het werk voor threadbeheer
wordt uitgevoerd op kernelniveau
Kernel houdt contet informatie bij
voor de processen + alle threads binnen
de processen
Scheduling gebeurt op thread-basis
Voordelen:
Kernel kan meerdere threads van het zelfde proces schedulen op meerdere processors
Geblokkeerde thread blokkeert niet het ganse proces
Nadelen:
Moduswisseling is vereist : overhead
Er is dus weliswaar een significante snelheidswinst bij het gebruik van multithreading met KLT’s in
plaats van processen met één thread, maar is de snelheidswinst nog groter bij het gebruik van ULT’s.
Gecombineerde benaderingen
Thread reatie wordt op gebruikersniveau gedaan
Grootste deel van de scheduling en de synchronisatie
gebeurt binnen de toepassing.
ULT’s worden gekoppeld aan evenveel of minder KLT’s
Goed ontwerp : combinatie van
voordelen van beide benaderingen
Andere indelingen
Threads : processen
1:1
M:1
1:M
M:N
Beschrijving
Elke uitvoeringsthread is een uniek proces met een
eigen adresruimte en bronnen
Een proces definieert een adresruimte en dynamisch
bezit van bronnen. Binnen het proces kunnen
meerdere threads worden gecreëerd en uitgevoerd
Een thread kan migreren van de ene naar de andere
procesomgeving. Hierdoor kan een thread
eenvoudig worden verplaatst tussen verschillende
systemen
Combineert de eigenschappen van de voorgaande
gevallen
Voorbeeldsystemen
De oorspronkelijke
implementaties van
UNIX
Windows NT,
Solaris, Linux, OS/2,
OS/3900 MACH
Ra ( Clouds ),
Emerald
TRIX
Symmetrische multiprocessing
Traditioneel werd de computer bezien als een sequentiële machine. ( instructie per instructie, proces
per proces , … ) Naarmate de computertechnologie zich verder ontwikkelde en de kosten van de
computerhardware daalden, hebben ontwerpers van computers gezocht nar steeds meer mogelijkheden
voor parallelle verwerking, meestal om de prestaties te verbeteren en de vertrouwbaarheid te
verhogen.
Architectuur van SMP
Flynn onderscheidde de volgende computersystemen:
SIMD-stroom ( single instruction, multiple data )
Één machine-instructie bestuurd de gelijktijdige uitvoering van een aantal verwerkingselementen in een
vast patroon. Met elk verwerkingselement is een gegevensgeheugen verbonden zodat elke instructie
door de verschillende processors wordt uitgevoerd met een andere verzameling gegevens.
MISD-stroom ( multiple instruction , single data )
Een reeks gegevens wordt verzonden naar een verzameling processors, die elk een andere
instructiereeks uitvoeren. ( nog nooit geïmplementeerd )
MIMD-stroom ( multiple instruction , multiple data )
Een verzameling processors voert tegelijk verschillende instructiereeksen uit met verschillende
gegevensverzamelingen.
MIMD-’s kunnen verder worden onderverdeeld op basis van de wijze waarop hun processors
communiceren. Hebben de processors elk een eigen geheugen, dan is elke processor een eigen
computer.
Geen gedeeld geheugen
=> onafhankelijke computers. De communicatie gebeurd via vaste paden of
netwerkvoorzieningen = Cluster of MultiComputer LOOSELY COUPLED
Gedeeld geheugen
=> Communicatie verloopt via dat geheugen. TIGHTLY COUPLED
•
MASTER / SLAVE
Kernel op 1 bepaalde processor , de andere processors voeren enkel gebruikersprogramma’s
uit. De master is verantwoordelijk voor het inroosteren van processen en threads.
•
SMP ( symmetrische multiprocessor )
Bij een SMP kan de kernel op eender welke processor uitgevoerd worden. Elke processor zorgt
voor de scheduling van zijn eigen threads en processen.
Het ontwerp van SMP’s en clusters is complex want men krijgt te maken met problemen zoals:
o De fysieke organisatie
o De structuur van onderliggende verbindingen
o Communicatie tussen processors
o Ontwerp van het BS
o Technieken voor softwaretoepassingen
Ontwerpen van besturingssystemen voor SMP
Een besturingssysteem voor SMP beheert de processors en andere computerbronnen op zo’n manier
dat de gebruiker het systeem op dezelfde wijze kan zijn als een systeem met één processor en
multiprogrammering.
De belangrijkste aandachtspunten voor het ontwerp zijn :
Gelijktijdig samenwerkende processen of threads
Bij meerdere processors die dezelfde/verschillende delen vd kernel uitvoeren , moet kerneltabellen en
beheerstructuren goed worden beheerd om deadlocks en ongeldige bewerkingen te voorkomen
Scheduling
Conflicten moeten worden vermeden.
Synchronisatie
De synchronisatie is een voorziening die zorgt voor wederzijdse uitsluiting en het ordenen van
gebeurtenissen. Een gebruikelijk mechanisme hiervoor zijn grendels ( locks )
Geheugenbeheer
De pagineringmechanismen van verschillende processors moet worden gecoördineerd om consistentie
te waarborgen wanneer verschillende processors een pagina / segment delen of besluiten een pagina te
vervangen
Betrouwbaarheid en fouttolerantie
Microkernels
Een microkernel is een kleine kern van een besturingssysteem die de basis vormt voor modulaire
uitbreidingen. Dit is een vrij populair concept.
Het begrip microkernel en zijn eigenschappen zijn vrij vaag:
Hoe groot moet een microkernel zijn om microkernel te mogen heten?
Moet de uitvoering ervan in kernel of gebruikersruimte plaatsvinden?
Hoe moet het ontwerp gebeuren en wat moet er allemaal geïmplementeerd worden?
Architectuur van een microkernel
De eerste besturingssystemen van de jaren 50 waren monolithische besturingssystemen:
Ze hadden geen structuur en waren onbeheersbaar
Elke procedure kon bijna elke andere procedure aanroepen
Later kwamen er gelaagde besturingssystemen :
Met modulaire programmeertechnieken voor het beheersen van
software ontwikkeling
De meeste of alle lagen worden uitgevoerd in de kernelmodus
Nadelen:
o Veel interactie tussen aangrenzende lagen
o Veranderingen hebben talrijke gevolgen
o Beveiliging moeilijk in te bouwen
De filosofie achter een microkernel is dat alleen de essentiële
kernfuncties van het besturingssysteem in de kernel zijn
opgenomen. Vele diensten die traditioneel tot het BS horen
zijn nu geïmplementeerd als externe subsystemen :
o Apparaat stuur programma’s ( Drivers )
o Bestandssystemen
o Manager voor virtueel geheugen
o Venstersysteem
o Beveiligingsdiensten
Voordelen van een microkernel
o
Uniforme interface bij verzoeken van een proces
Processen hoeven geen onderscheid te maken tussen diensten op kernel en gebruikers
niveau
Alle diensten worden verleend via het uitwisselen van berichten
o
Uitbreidbaarheid
Eenvoudig toevoegen van nieuwe diensten
o
Flexibiliteit
Nieuwe voorzieningen kunnen gemakkelijk toegevoegd worden
Bestaande voorzieningen kunnen gemakkelijk verwijderd worden
o
Overdraagbaarheid
Alle processorspecifieke code bevindt zich in de microkernel:
Veranderingen om een het BS aan te passen moet hier gebeuren en niet in andere diensten
o
Betrouwbaarheid
Modulair ontwerp
Kleine microkernel kan uitgebreid getest worden
Beperkt aantal API’s
o
Ondersteuning van gedistribueerde systemen
Berichten worden verstuurd naar diensten :
Een verzendend proces moet niet weten op welke machine de dienst zich bevindt
o
Ondersteuning voor objectgeoriënteerde besturingssystemen ( OOOS )
Componenten zijn objecten met duidelijk gedefinieerde interfaces, en die onderling
verbonden kunnen worden om software te bouwen.
Prestaties van een microkernel
Een mogelijk nadeel van microkernel dat vaak genoemd wordt zijn de prestaties :
Het opstellen en versturen van een bericht en het accepteren en decoderen het antwoord kost meer tijd
dan het uitvoeren van 1 dienstaanroep.
Veel is afhankelijk van de grootte en de functionaliteit van de microkernel.
Ontwerp van een microkernel
Aangezien de functionaliteit en de grootte van verschillende microkernels variëren kunnen geen vaste
regels worden opgesteld qua structuur en functionaliteiten. Hier lichten we de minimale verzameling
van functies en diensten van de microkernel toe om de indruk te geven van het ontwerp van
microkernels. Deze functies worden ingedeeld in de volgende 3 categorieën:
Primitief geheugenbeheer
De microkernel moet het hardware concept adresruimte ondersteunen om de implementatie van
bescherming op procesniveau mogelijk te maken. Zolang de microkernel verantwoordelijk blijft voor
het afbeelden van alle virtuele pagina’s op fysieke pagainframes, kan het grootste deel van het
geheugenbeheer worden geïmplementeerd buiten de kernel.
1. Thread in toepassing verwijst naar een pagina niet in
het hoofdgeheugen.
2. Paginafout en uitvoering valt terug op kernel
3. Kernel stuurt bericht naar pagineerder met de
aangeving naar welke pagina verwezen wordt.
4. Pagineerder kan besluiten de pagina te laden
5. Is de pagina eenmaal beschikbaar , dan stuurt de
pagineerder een hervattingbericht naar de toepassing
Communicatie tussen processen
De elementaire vorm van communicatie tussen processen of threads in een BS met een microkernel is
het bericht. Een bericht bestaat uit:
Een kop : info over verzendende en ontvangende proces
Een romp : directe gegevens , verwijzing naar een blok gegevens en/of besturingsinformatie
Vaak kunnen we zeggen dat IPC ( Inter Proces Communication ) gebaseerd is op poorten die
verbonden zijn met processen. Een poort is hier in wezen een wachtrij met berichten die bestemd zijn
voor een bepaald proces ( een proces kan verschillende poorten hebben )
I/O en interruptbeheer
Bij een microkernel architectuur is het mogelijk hardware-interrupts af te handelen als berichten en I/
O poorten op te nemen in adresruimten. De microkernel kan interrupts herkennen maar handelt ze niet
af. In plaats daarvan genereert de microkernel een bericht voor het proces op gebruikersniveau dat op
dit moment is verbonden met die interrupt. Is een interrupt ingeschakeld , dan is een bepaald proces op
gebruikersniveau toegewezen aan de interrupt en onderhoudt de kernel de mapping.
Het omzetten van interrupts in berichten moet worden uitgevoerd door microkernel maar de
microkernels is niet betrokken bij de interruptafhandeling voor specifieke apparaten.
Beheer van threads en SMP in Solaris
Solaris gebruikt een ongewone threadvoorziening met meerdere niveaus die ontworpen is met het oog
op een hoge flexibiliteit bij het benutten van processorbronnen.
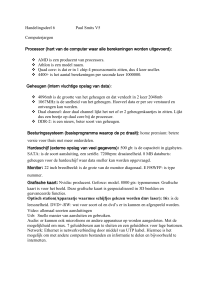
Architectuur met multithreading
Solaris gebruikt 4 afzonderlijke, aan threads verwante concepten:
1. Proces: normale UNIX proces , omvat de adresruimte , stack en procesbesturingsblok
2. Threads op gebruikersniveau : geïmplementeerd als een threadbibliotheek in de adresruimte
van een proces
3. Lichtgewichtprocessen : Elk LWP ondersteund één of meer ULT’s en is een ‘ afbeelding ‘
naar één kernelthread.
4. Kernelthreads : basisentiteiten die kunnen worden ingeroosterd en toegedeeld worden om te
worden uitgevoerd op een van de processors van het systeem
Deze figuur illustreert de relatie tussen deze 4 entiteiten. Er is precies 1 kernelthread voor elk LWP.
Elke LWP is verbonden aan 1 toedeelbare kernelthread.
•
•
•
•
•
Proces 1 bestaat uit één ULT die is gebonden aan één LWP.
Proces 2 komt overéén met een zuivere ULT benadering. Alle ULT’s worden ondersteund
door 1 kernelthread en daardoor kan maar een ULT tegelijk uitgevoerd worden.
Proces 3 toont meerdere threads die veelvoudig zijn verboden aan een kleiner aantal LWP’s.
Proces 4 heeft voor elke ULT een kernelthread
Proces 5 toont een combinatie van 3 en 4
Motivering
De combinatie van threads op gebruikersniveau en threads op kernelniveau biedt de programmeur van
toepassingen de mogelijkheid gelijktijdigheid toe te passen op de wijze die het meest efficiënt en het
meest geschikt is voor een bepaalde toepassing.
Interrupts als threads
De meeste besturingssystemen kennen twee basisvormen van asynchrone activiteit : processen en
interrupts. Processen of threads werken met elkaar samen en beheren het gebruik van gedeelde
gegevensstructuren door middel van verschillende primitieven die zorgen voor wederzijdse uitsluiting
en die hun uitvoering synchroniseren.
De reden voor het omzetten van interrupts in threads is het terugbrengen van de overhead. Dit zorgt
voor een betere performantie.
Oplossing in Solaris:
1. Solaris gebruikt verzameling Kernelthreads voor het afhandelen van interrupts. Zoals elke
kernelthread heeft een Interruptthreads een eigen ID , prioriteit , context en stack
2. Voor het afhandelen van interrupts worden de gebruikelijke synchronisatie technieken voor
threads gebruikt
3. Interruptthreads krijgen een hogere prioriteit dan alle andere Kernelthreads.
Beheer van processen en threads in Linux
Taken in Linux
In Linux wordt een proces of taak weergegeven door een task_struct gegevensstructuur. Deze bevat
informatie over een aantal onderwerpen:
Toestand of status v/h proces ( Uitvoering , Gereed , geblokkeerd , opgeschort , zombie ,… )
Schedulinginformatie ( informatie nodig om processen in te roosteren )
Identificatiecodes : uniek ID per proces + ID voor gebruiker en groep
Interprocescommunicatie
Verwijzingen ( naar bijvoorbeeld ouder processen of zus-processen )
Tijden en klokken ( creatietijdstip + processortijd die al benut is door het proces )
Bestandssysteem : verwijzigen naar alle gerelateerde bestanden
Adresruimte ( definieert de virtuele adresruimte die toegewezen is aan het proces )
Specifieke processorcontext : inhoud van de registers en stack
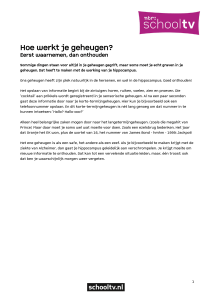
Bovenstaande figuur toon de uitvoeringstoestanden van een proces/thread in Linux :
o
o
o
o
o
Actief ( running )
In Uitvoering
of Gereed
Onderbreekbaar ( Interruptable )
Het proces wacht op een gebeurtenis
Ononderbreekbaar ( Uninterruptable )
Het proces wacht op een hardwareconditie en zal op niets anders reageren
Gestopt ( stopped )
Het proces is gestopt en kan alleen worden hervat wanneer een ander proces hiervoor actie
onderneemt
Zombie
Het proces in geëindigd maar beschikt nog wel over zijn taakstructuur in de procestabel
Threads in Linux
Oudere Linux-versies: geen multithreading
Geen onderscheid tussen threads en processen: threads op gebruikersniveau komen overeen met
processen op kernelniveau
Threads van eenzelfde gebruikersproces: zelfde groepsidentificatiecode op kernelniveau
proces creëren: attributen van huidig proces kopiëren a.h.v. clone()
fork() geïmplementeerd a.h.v. clone()
traditionele fork() wordt geïmplementeerd als clone() met alle clone-vlaggen uit
Gelijktijdigheid : wederzijdse uitsluiting en synchronisatie
De hoofdthemas van het ontwerp van besturingssystemen hangen alle samen met het beheer van
processen en threads:
Multirogrammering ( beheer van meerdere processen in een systeem met 1 processor )
Multiprocessing (het beheer van meerdere processen in een systeem met meerdere
processors)
Gedistribueerde verwerking ( beheer van meerdere processen op verschillende
computersystemen )
Aan de basis van al deze zaken ligt gelijktijdigheid. Gelijktijdigheid treedt op in 3 situaties :
o Meerdere toepassingen ( multiprogrammatie )
o Gestructureerde toepassing ( een applicatie kan geprogrammeerd worden als een
verzameling gelijktijdige processen )
o Structuur vh BS ( kan ook beschouwd worden als een verzameling van processen of
threads. )
Enkele belangrijke termen met betrekking tot gelijktijdigheid:
Kritieke sectie
Deadlock
Livelock
Wederzijdse uitsluiting
Race-conditie
Verhongering
Een stuk programmacode binnen een proces waarvoor toegang tot
gedeelde bronnen noodzakelijk is en dat mogelijk uitgevoerd wordt
terwijl een ander proces in een corresponderend stuk programmacode
uitgevoerd wordt.
Een situatie waarin 2 of meer processen niet verder verwerkt kunnen
worden omdat elk van de processen op een of meerdere andere wacht
tot deze iets doen.
Een situatie waarin 2 of meer processen continu hun toestand wijzigen
als respons op veranderingen in het andere proces/de andere processen,
zonder daarvoor enig werk van betekenis te doen.
De eis dat wanneer een proces zich in kritieke toestand bevindt waarbij
gedeelde bronnen gebruikt worden, geen van de andere processen zich
in een kritieke sectie mag bevinden die gebruik kan maken van een of
meerdere van de gedeelde bronnen.
Een situatie waarin verschillende threads of processen een gedeeld
gegeven lezen en schrijven en het uiteindelijke resultaat afhangt van de
timing van de uitvoering van de lees- en schrijf bewerkingen.
Een situatie waarin een uitvoerbaar proces eindeloos genegeerd wordt
door de scheduler; het komt nooit aan de beurt hoewel het gereed is
voor uitvoering.
Principes van gelijktijdigheid
Bij het verweven en overlappen van processen is er dezelfde problematiek : nl. de relatieve snelheid
van uitvoering van processen kan niet voorspeld worden en dit brengt complicaties met zich mee
zoals:
o Het delen van bronnen kent tal van gevaren. ( tegelijke lees en schrijfbewerkingen kan de
integriteit van gegevens in gevaar brengen
o Het optimaal beheren van de toewijzing van deze bronnen is een uitdaging voor het
besturingssysteem
o Programmeerfouten zijn zeer lastig op te sporen omdat fouten niet reproduceerbaar zijn.
Een eenvoudig voorbeeld
void echo ()
{
chin = getchar();
chout = chin;
putchar =(chout);
}
Dit programma toont de basiselementen voor de registratie en uitvoer van een toetsaanslag op het
scherm.
Het delen van hoofdgeheugen door processen is nuttig voor een efficiënte en sterke interactie tussen
processen. Dit delen kan echter tot problemen leiden :
1. Proces 1 start echo() en wordt onderbroken net na getchar(). Het laatst ingevoerde teken, x ,
is in chin opgeslagen.
2. Proces 2 wordt geactiveerd en start echo() die volledig wordt uitgevoerd en de invoer en
uitvoer van 1 teken , y , op het scherm weergeeft.
3. Proces 1 wordt hervat . Op dat moment is de waarde in chin overgeschreven en daarmee
verloren gegaan. chin bevat nu de waarde , y, en voert deze dan ook uit.
=> De gedeelde globale variabelen ( en andere gedeelde bronnen ) moeten worden beschermd en dat
dit alleen mogelijk is door het bewaken van de code die toegang heeft tot de variabele.
Veronderstel nu het zelfde probleem maar dan bij een systeem met meerdere processors, die dezelfde
procedure echo aanroepen en dat er geen mechanisme is voor het toegangsbeheer tot de gedeelde
globale variabele.
Proces P1
.
chin = getchar();
.
chout = chin;
putchar(chout);
.
.
Proces P2
.
.
chin = getchar();
chout = chin;
.
putchar(chout);
.
Het resultaat is dat het voor P1 ingevoerde teken verloren gaat voordat het wordt weergegeven en
zowel P1 als P2 geven het ingevoerde teken van P2 weer.
Nu stellen we de regel in dat er maar 1 proces tegelijk toegang mag hebben tot het proces :
1. Proces P1 en P2 worden beide verwerkt op een afzonderlijke processor en beide roepen de
procedure echo aan.
2. Terwijl P1 zich binnen de procedure echo bevindt roept P2 echo aan. Aagenzien P1 zich nog
in de procedure echo bevindt, wordt de toegang van P2 tot de procedure geblokkeerd. P2
wordt daarom opgeschort.
3. Voltooit P1 de uitvoering van echo , dan verlaat het de procedure en wordt de uitvoering van
P2 hervat en begint P2 met de uitvoering van echo
Voorgaand voorbeeld was een race-conditie. Een race conditie onstaat wanneer verschillende
processen of threads gegevensitems lezen en schrijven, waardoor het uiteindelijke resultaat afhankelijk
is van de volgorde waarin de instructies in de verschillende processen worden uitgevoerd.
Aandachtspunten voor het besturingssysteem
1. Het besturingssysteem moet de verschillende actieve processen kunnen volgen. ( dit gebeurd
door middel van de procesbesturingsblokken )
2. Het besturingssysteem moet bronnen toewijzen en terug afnemen. Bronnen :
a. Processortijd
b. Geheugen
c. Bestanden
d. I/O-apparaten
3. Het besturingssysteem moet de gegevens en fysieke bronnen van elk proces beschermen
tegen verstoringen door andere processen
4. Resultaat van een proces en de uitvoer ervan moet onafhankelijk zijn van de snelheid van de
uitvoering ervan ten opzichte van de snelheid van andere concurrerende processen.
Interactie van processen
Mate van
bewustzijn
Processen zijn zich
niet bewust van
elkaar
Processen zijn zich
indirect bewust van
elkaar ( gedeeld
object)
Processen zijn zich
direct bewust van
elkaar
( communicatie –
primitieven )
Relatie
Invloed van proces
op een ander proces
o Resultaten van een proces zijn
onafhankelijk van de actie van
andere processen
o Timing van proces kan beïnvloed
zijn
Samenwerking o Resultaten van een proces kunnen
afhankelijk zijn van informatie van
door delen
andere processen.
o Timing van proces kan beïnvloed
zijn
Concurrentie
Samenwerking o Resultaten van een proces kunnen
afhankelijk zijn van informatie van
door
andere processen.
communicatie
o Timing van proces kan beïnvloed
Mogelijke besturings
- problemen
o Wederzijdse
uitsluiting
o Deadlock
o Uithongering
o Wederzijde
uitsluiting
o Deadlock
o Uithongering
o Gegevenssamenhang
o Deadlock
o uithongering
zijn
Concurrentie tussen processen om bronnen
Er is behoefte aan wederzijdse uitsluiting. Er is een kritieke bron en een kritieke sectie.
o Een kritieke bron is een niet deelbare bron: Bijvoorbeeld een printer.
o Een kritieke sectie is een deel van programma dat de kritieke bron gebruikt
( slechts 1 programma tegelijk mag zich in zijn kritieke sectie bevinden )
Dit veroorzaakt twee andere besturingsproblemen :
o Deadlock
BS wijst Bron1 toe aan Proces2 en Bron2 aan Proces1. Elk proces wacht op een van de twee
bronnen. Beide zullen de bron die al bezig is pas vrijgeven wanneer ook de andere bron in
bezit gekomen is en vervolgens de functie waarvoor beide bronnen nodig was is uitgevoerd.
o Starvation
Dit gebeurd wanneer een proces constant genegeerd wordt alhoewel het gereed is om uit te
voeren.
Samenwerking tussen processen door delen
Aangezien gegevens toegankelijk zijn vanuit bronnen ( apparaten / geheugen ) spelen nu ook de
beheersproblemen wederzijdse uitsluiting, deadlocks en uithongering een rol. Het enige verschil is dat
gegevenselementen toegankelijk kunnen zijn in 2 verschillende modi ( lezen / schrijven ) en dat alleen
het schrijven wederzijds uitgesloten hoeft te zijn.
Naast deze problemen bestaat echter een nieuwe belangrijkere vereiste: gegevenssamenhang ( data
coherence )
Samenwerking tussen processen door communiceren
Werken processen samen door te communiceren, dan nemen de verschillende processen gezamenlijk
deel aan een gemeenschappelijke inspanning, die alle processen verenigt. De communicatie is daarbij
een middel om de verschillende activiteiten te synchroniseren of te coördineren.
De communicatie verloopt via de uitwisseling van berichten. Bij het uitwisselen van berichten wordt
niets gedeeld door processen dus wederzijdse uitsluiting is geen controle eis voor dit soort
samenwerking. De problemen deadlock en uithongering doen zich wel voor.
Vereisten voor wederzijdse uitsluiting
1. Wederzijde uitsluiting moet dwingend opgelegd worden: slechts 1 proces van alle processen
met kritieke secties voor dezelfde bron of hetzelfde gedeelde object wordt tegelijkertijd in de
kritieke sectie toegelaten.
2. Een proces dat stopt in zijn niet kritieke sectie moet dat doen zonder andere processen te
verstoren
3. Deadlocks en starvation mogen niet voorkomen
4. Een proces dat toegang wil tot een kritieke sectie moet zonder vertraging toegang krijgen,
wanneer er geen enkel ander proces zich in zijn kritieke sectie bevindt
5. Geen veronderstellingen gebruikt over de relatieve snelheiden van processen/ aantal processen
6. Een proces mag zich maar een beperkte tijd in zijn kritieke sectie bevinden
Wederzijdse uitsluiting: hardwareondersteuning
Uitschakelen van interrupts
systeem met 1 processor: concurrerende processen kunnen elkaar niet overlappen
een proces wordt afgebroken door een interrupt => ervoor zorgen dat een proces niet kan onderbroken
worden door interrupts uit te schakelen
(achterliggende theorie: wanneer een interrupt optreedt gaat de processor in kernelmode en
voert daar de gewenste code uit, dus, andere code wordt uitgevoerd tussen de kritieke sectie, in het
slechtste geval verandert die code iets waarmee het proces in usermode mee bezig was waardoor alles
in het water valt. Een ander probleem kan zijn dat de interrupt vereist dat een ander proces wordt
toebedeeld aan de processor waardoor het eerste proces geblokkeerd wordt temidden van zijn kritieke
sectie. Het kan dan even duren vooraleer dat proces weer vrijkomt (denk maar aan FIFO) waardoor de
bron die het proces gebruikt lange tijd geblokkeerd blijft.
while(true)
{
schakel interrupts uit;
voer kritieke sectie uit;
schakel interrupts in;
rest;
}
=> omdat de kritieke sectie niet kan worden onderbroken is mutual exclusion gegarandeerd!
Nadelen:
efficiëntie uitvoering daalt want processor wordt beperkt in zijn mogelijkheid om processen te
verweven
werkt niet in multiprocessoromgeving (!!daar heeft het geen zin om de interrupts op 1
processor even af te zetten met de reden dat de code daarom atomair kan verlopen want op de
andere processoren kunnen er processen lopen die tegelijkertijd dingen gaan veranderen aan
variabelen die het eerste proces in zijn kritieke sectie gebruikt. een oplossing zou dan zijn om
op de gebruikte processor interrupts te disablen en op de andere processen de processen te
blokkeren maar dat is zo inefficiënt dat dat geen goed idee is)
Speciale machine instructies
de testset en de exchange instructie
Beiden zijn machineïnstructies die ervoor zorgen dat de kritieke sectie op atomair niveau wordt
uitgevoerd! Parbegin betekent dat het programma deze processen parallel moet uitvoeren
Instructie test and set
testandset gaat controleren of een integer == 0, zo ja, dan wordt die op 1 gezet en wordt er true
gereturnd => uit de while lus en de kritieke sectie wordt uitgevoerd, als er dan ondertussen een ander
proces ook zijn kritieke sectie wil uitvoeren, dan wordt er false gereturnd en zit dat proces vast in de
lus tot wanneer het vorige proces bolt terug op 0 zet. De processen die zo in de loop terechtkomen zijn
zijn dan niet geblokkeerd maar busy waiting (processor wordt maw gebruikt maar is niet nuttig aan
het doen, proces zit immers in een loop); busy waiting wil zeggen: een proces kan niets doen tot het
toestemming krijgt de kritieke sectie te betreden. Welk het volgende proces wordt dat wordt
uitgevoerd wanneer bolt terug 0 is, is het eerste proces dat test of bolt == 0. Dus eigenlijk is dit vrij
random (afhankelijk van de schedulingsstrategie)
Instructie exchange
Wisselt de inhoud van een register met die van een geheugenlocatie. In het voorbeeld is het iets
simpeler, daar worden een 0 en een 1 gewisseld. Enkel het proces waarvoor geldt dat keyi == 0 (en
dus bolt == 0 bij het begin van de uitvoering) mag de kritieke sectie betreden, al de rest moet wachten
tot het eerste proces bolt terug op 0 heeft gezet.
Eigenschappen van de benadering met machine-instructies
Voordelen van het werken met machine-instructies:
1. toepasbaar op alle processen op een machine met 1 processor en op alle processen op een
systeem van multiprocessing die het hoofdgeheugen delen
<-> als ze geen geheugen delen, dan delen ze ook geen variabelen en kan er dan ook niet met
de waarde van variabelen gewerkt worden!!
2. eenvoudig => makkelijk te controleren
3. kan worden gebruikt voor het ondersteunen van meerdere kritieke secties waarbij elke kritieke
sectie zijn eigen variabele kan hebben
Nadelen van het werken met machine-instructies:
1. busy-waiting: proces blijft processortijd verbruiken terwijl het niets nuttig aan get doen is
2. starvation kan nog steeds: aangezien het willekeurig is welk proces een proces opvolgt dat uit
zijn kritieke sectie komt en als er meerdere processen zijn die 'busy waiting' zijn, dan kan het
zijn dat een proces zeer lang in de wachtrij staat
3. deadlock: P1 gaat in kritieke sectie maar wordt onderbroken door P2 dat een hogere prioriteit
heeft, echter, om te voltooien heeft P2 dezelfde bron nodig als P1 maar die is geblokkeerd
door P2 en P1 wacht op de voltooiing van P2... (dan maakt het niet uit of er even een ander
proces wordt geactiveerd want de clue is dat deze twee processen niet verder kunnen, tenzij
het OS P2 plots een lagere prioriteit geeft dan P1 waardoor P1 weer actief kan worden...)
Semaforen
Grondbeginsel : Twee of meer processen kunnen samenwerken dmv signalen waarbij een proces
gedwongen wordt te stoppen op een opgegeven plaats totdat het een signaal ontvangt dat het mag
verdergaan.
Voor het verzenden van een signaal via semafoor s voert een proces de primitieve semSignal(s) uit.
Voor het ontvangen van een signaal de primitieve semWait(s).
Principe: semWait(s) => een proces wordt onderbroken totdat semSignal(s) door een ander proces
verzonden is.
Om het gewenste effect te bereiken kunnen we de semafoor beschouwen als een variabele die een
gehele waarde heeft en waarvoor drie bewerkingen zijn gedefinieerd :
1. semafoor wordt geïnitialiseerd op een niet-negatieve waarde
2. semWait(s) verlaagt de waarde van s met 1, wordt de waarde negatief, dan wordt dat proces
geblokkeerd
3. semSignal(s) verhoogt de waarde van s, was de waarde niet positief en nu wel, dan wordt een
proces dat geblokkeerd was door semWait(s) nu gedeblokkeerd.
semWait() en semSignal() zijn primitieven en worden atomair uitgevoerd ( zonder onderbreking ).
Een binaire semafoor kan worden geïnitialiseerd op waarde 0 of 1 en kan ook alleen maar deze twee
waarden hebben.
1. Bewerking semWaitB() controleert waarde van de semafoor. Als de waarde nul is wordt het
proces dat semWaitB() uitvoert geblokkeerd. Als de waarde 1 is wordt het proces verder
uitgevoerd en de waarde in 0 veranderd.
2. De bewerking semSignalB() controleeert of er processen op deze semafoor geblokkeerd zijn.
Als dat het geval is , wordt een proces dat geblokkeerd is door een bewerking semWaitB
vrijgegeven. Zijn er geen geblokkeerde processen , waarde => 1
Niet binaire semaforen worden vaak een tellende of algemene semafoor genoemd.
Het proces dat het langst is geblokkeerd wordt als eerste vrijgelaten uit de wachtrij. Bij deze strategie
is een semafoor STERK. Als de volgorde van processen uit de wachtrij niet is vastgelegd wordt het
een ZWAKKE semafoor. STERKE semaforen garanderen de afwezigheid van uithongering, zwakke
niet.
!!!Voordeel t.o.v. machine-instructies: de processen worden hier geblokkeerd => de processor voert
ze niet meer uit en verdoet er dan ook zijn tijd niet mee <-> busy waiting bij machine-instructies!!!
Wederzijdse uitsluiting
Op elk moment kan de waarde van de semafoor daarbij als volgt worden geïnterpreteerd:
De waarde van de semafoor ( bij >= 0 ) is het aantal processen dat semWait(s) zonder
onderbreking kan uitvoeren
De waarde van de semafoor ( bij < 0 ) is het aantal processen dat is onderbroken in de
wachtrij van de semafoor.
Implementatie van semaforen
Zoals eerder gezegd is het essentieel dat de bewerkingen semWait en semSignal worden
geïmplementeerd als atomaire primitieven. Mogelijkheden :
in hard-of firmware
software: probleem: als je bvb naar het algoritme van Dekker kijkt, dan is er veel overhead
omdat de processor een proces aan het uitvoeren kan zijn dat in wezen niets doet, buiten dan
controleren of de vlaggen wel goed staan
mutual exclusion door mechanisme in de hardware: testandset en interrupts
Bij testandset wordt de de testset gebruikt bij de wait en de signal.
Er kan maar 1 proces per keer een semwait(s) doen => wanneer een eerste proces dit wil
uitvoeren, dan wordt s.flag op 1 gezet waardoor, als er een tweede proces is dat ook een
semWait(s) wil oproepen, even moet wachten vooraleer het de semafoor kan aanpassen => in
de while loop (= busy waiting). Wanneer dan het eerste proces de wait heeft uitgevoerd, dan
wordt s.flag weer op 0 gezet zodat een proces dat hierop aan het wachten was, uit de loop kan
en de semafoor kan aanpassen. Dit staat los van het feit of het proces al dan niet geblokkeerd
gaat geraken wanneer de waarde van de semafoor < 0, het zorgt er gewoon voor dat er geen 2
processen tegelijkertijd de semafoor kunnen aanpassen
Nadeel is dat er dan gedaan wordt aan busy waiting maar omdat een semwait niet zo lang
duurt is dat nog redelijk.
Idem voor bij het enabelen en disabelen van interrupts (alleen bij systemen met 1
processor!!!!!). Dit wordt gedaan zodat een semwait en semsignal atomaire acties kunnen zijn
(ze kunnen dan niet worden onderbroken door een interrupt) het kleine nadeel is dan wel dat
de processor dan even geen processen kan verweven maar omdat semWait en semSignal zo
kort duren valt dit nadeel vrij goed mee.
Monitoren
Semaforen hebben nadelen :
verantwoordelijkheid voor plaatsing van semWait en semSignal ligt volledig bij de
programmeur wat dus de kans op fouten groter maakt dan bij monitors waar deze
verantwoordelijkheid gedeeltelijk wordt afgeschoven op het vertaalprogramma.
semWait en semSignal kunnen overal verspreid staan over een programma en het is soms
moeilijk om te zien wat hun invloed juist is <-> een monitor is meer afgelijnd, het is het
creëren van een atomair blok daar waar er eerst geen was
Monitor is een constructie in een programmeertaal die een functionaliteit biedt die vergelijkbaar is met
die van semaforen, maar die gemakkelijker te besturen is. Ook is ze geïmplementeerd als een
programmabibliotheek. Dit biedt de mogelijkheid grendels op elk object te plaatsen.
Monitor met signal
Een monitor is een softwaremodule die bestaat uit een reeks procedures, een initialisatiereeks en een
lokale gegevens. Kenmerken :
1. Lokale gegevensvariabelen zijn uitsluitend toegankelijk voor de procedures van de monitor en
niet voor andere externe procedures.
2. Een proces benadert de monitor door een van de procedures ervan aan te roepen.
3. Slecht één proces tegelijk kan worden uitgevoerd in de monitor.
Door slechts 1 proces tegelijk toe te laten kan de monitor worden gebruikt als een voorziening voor
wederzijdse uitsluiting. Een monitor ondersteunt ook synchronisatie door gebruik te maken van
conditievariabelen die zijn opgenomen binnen de monitor en die alleen binnen de monitor toegankelijk
zijn. 2 functies werken hiermee :
1. cwait(c) : stelt de uitvoering van het aanroepende proces uit op conditie c. De monitor is
daarna beschikbaar voor gebruik door een ander proces.
2. csignal(c) : hervat de uitvoering van een bepaald proces dat werd onderbroken na een cwait op
dezelfde conditie. Zijn er meerdere van dergelijke processen, kies dan één proces; zijn er geen
wachtende , doe dan niets!
wanneer er bij monitors een signal wordt verstuurd maar er is helemaal geen proces dat wacht op de
conditievariabele (er zit geen proces in de wachtrij van de variabele), dan gebeurt er helemaal niets <> semaforen
Dus: monitor toegankelijk voor slechts 1 proces per keer, als eerste proces binnenkomt, dan wordt de
conditie gewijzigd waardoor een tweede proces door cwait(c) uit te voeren terechtkomt in een wachtrij
van de conditie totdat eerste proces een signal uitvoert dat de monitor vrij is => 1 proces uit de
wachtrij hervat zijn uitvoering net na de cwait(x).
De verantwoordelijkheid voor de correctheid van de synchronisatie ligt nog steeds bij de
programmeur, maar :
Voordelen tov semaforen:
de synchronisatiefuncties blijven beperkt tot de monitor => overzichtelijker en makkelijker te
controleren <-> semaforen: kunnen over het hele programma staan.
Nadelen van monitors:
een goede synchronisatie vereist dat procedures worden aangeroepen voor en na het gebruik
van de gedeelde bron. Gebeurt dit niet of verkeerd, dan bestaat de kans dat een thread of een
proces toch nog toegang heeft tot een gedeelde bron terwijl een ander proces daar ook mee
bezig is
geneste monitoren kunnen deadlocks veroorzaken: P1 zit in een procedure van een high-level
monitor en gaat over naar een procedure van een lower-level monitor, daar wordt het proces in
een wachtrij geplaatst. Alles goed en wel voor de lower-level monitor, die komt zo vrij voor
een ander proces maar de high-level monitor is nog steeds bezet => geen ander proces kan die
gebruiken => deadlock
Gelijktijdigheid : Deadlocks en uithongering
Deadlock en starvation zijn twee problemen ten gevolge van de oplossingen om gelijktijdige
verwerking te ondersteunen
Beginselen van deadlock
Deadlock:
een permanente blokkering van processen die met elkaar wedijveren om bronnen of die met elkaar
communiceren
fig 6-2 p 285!!
Herbruikbare hulpbronnen
Reusable resource <-> consumable resource
bvb.: hoofdgeheugen, secundair geheugen, processor, databases en semaforen
Een herbruikbare (hulp)bron is een bron die veilig door 1 proces tegelijkertijd kan worden gebruikt en
na dit gebruik is de bron er nog steeds, ze geraakt door gebruik niet op
Deadlock: wanneer twee processen een bron vasthouden en verzoeken om een andere bron zie
voorbeeld p288
voorbeeld van deadlock bij geheugen: wanneer er gevraagd wordt om geheugen dat nog moet vrijgezet
worden door een ander proces dat echter zelf nog om geheugen vraagt en niets kan vrijzetten omdat
het wacht op geheugen
Verbruikbare hulpbronnen
Consumable resource: een bron die kan worden gemaakt en vernietigd; het aantal verbruikbare
bronnen van een bepaald soort is meestal onbeperkt
bvb.: interrupts, signalen, berichten(!!! processen die met elkaar communiceren!!)
Deadlock: P1 wacht op een bericht van P2 om naar P2 te versturen terwijl P2 wacht op een bericht
van P1 om naar P1 te versturen
=> een deadlock treedt op als het ontvangen blokkerend is
brontoewijzingsschema's
Een punt is een voorstelling van een bron, hierboven is er van elke bron maar 1 instantie
een proces vraagt om een bron maar die nog niet toegewezen, pas wanneer er een pijl van een bron
naar een proces gaat is de bron toegewezen aan dat proces.
Voorbeeld van een deadlocksituatie:
Wanneer er meerdere instanties van een herbruikbare bron kunnen toegewezen worden (bvb van I/O
apparaten) aan een proces is de kans op een deadlock kleiner
Condities voor deadlock
Er zijn drie voorwaarden die er voor zorgen dat een situatie in een deadlock kan verzeild geraken:
1. wederzijdse uitsluiting: een bron mag maar aan 1 proces gelijktijdig worden toegewezen
2. vasthouden en wachten: een proces mag een bron vasthouden terwijl het wacht op de
toewijzing van andere bronnen
3. geen preëmptieve onderbreking: een bron kan niet zomaar worden afgenomen van een
proces dat de bron vasthoudt
Deze drie voorwaarden zijn echter wenselijk!!
mutual exclusion: consistentie van gegevens en gelijktijdigheid
geen preëmptieve onderbreking: tenzij met een zeer goed rollback-mechanisme (stel: een
proces is bezig met bewerkingen op gegevens uit een bestand, opeens wordt dat bestand
afgenomen van dat proces en dat bestand gaat lezen uit dat bestand => een fout)
Noodzaak aan een 4e voorwaarde voor deadlock:
4. Cirkelvormig wachten: een ketting van wachtende processen waarbij de processen wachten
op het vrijkomen van een bron dat een ander proces vasthoudt
De eerste drie condities kunnen leiden tot de vierde. Wanneer de vierde voorwaarde waar is, dan is er
een deadlock.
Er zijn drie strategiën om om te gaan met een deadlock: voorkomen, vermijden en detecteren
Samenvatting:
aanpak
Toewijzing
bronnen
Verschillende
vormen
Voordelen
Nadelen
Voorkomen
bronnen
worden met
mondjesmaat
toegewezen
alle bronnen
tegelijk
aanvragen
+ preëmptieve ingreep is niet
nodig
+ werkt goed bij processen
die activiteiten in één klap
uitvoeren
- inefficiënt
- vertraagt het
starten van
processen
- toekomstige
behoefte aan
bronnen moet
gekend zijn
preëmptieve
ingreep
+ goed voor gebruik bij
processen waarbij de
toestand gemakkelijk kan
worden opgeslaan en
hersteld
- preëmptieve
onderbrekingen
treden vaker op dan
nodig
ordenen van
bronnen
+ implementatie dmv
controles tijdens compilatie
- maakt toenemende
vragen om bronnen
onmogelijk
Vermijden
middenweg
tussen
detecteren en
voorkomen
bijsturen om
minstens 1
veilige weg te
vinden
+ preëmptieve onderbreking - toekomstige
is niet noodzakelijk
behoeften aan
bronnen moeten
bekend zijn
- processen kunnen
lange tijd
geblokkeerd zijn
Detecteren
aangevraagde
bronnen indien
mogelijk altijd
vrijgeven
periodiek
aanroepen om te
testen op
deadlock
+ vertraagt nooit het starten
van een proces
+ maakt online afhandeling
mogelijk
- verlies door
preëmptieve
onderbreking
Voorkomen van deadlock
deadlock wordt uitgesloten
twee mogelijkheden:
1. indirecte methode: voorkomen van 1 van de 3 noodzakelijke voorwaarden
2. directe methode: voorkomen van het cirkelvormig wachten
Wederzijdse uitsluiting
kan niet onmogelijk worden gemaakt: sommige bronnen (bvb naar een bestand schrijven) vereisen nu
eenmaal wederzijdse uitsluiting en dan vereist dit ook ondersteuning door OS!
Vasthouden en wachten
het proces vraagt in één keer alle vereiste bronnen aan en wordt geblokkeerd zolang er een of
meerdere bronnen niet beschikbaar zijn
inefficiënt:
op die manier kan een proces lang geblokkeerd blijven terwijl het mss al gedeeltelijk kan
uitgevoerd worden met slechts een deel van de bronnen
reeds toegewezen bronnen aan een dergelijk geblokkeerd proces zijn ontoegankelijk voor
andere processen terwijl deze bronnen niet worden gebruikt
Dit vereist ook dat een proces vanaf het begin weet welke bronnen het zal nodig hebben en dat het
weet waar het deze kan vinden
Geen preëmptieve onderbreking
er zijn verschillende manieren om tóch preëmptief te onderbreken:
een proces bezet een aantal bronnen, verzoekt om een andere -> verzoek wordt geweigerd =>
proces moet alle bronnen vrijgeven en er een volgende keer terug om verzoeken
OS onderbreekt preëmptief een proces dat om een bron vraagt dat bezet is door een ander
proces en eisen dat dit zijn bronnen vrijgeeft(voorkomt enkel een deadlock wanneer beide
processen een andere prioriteit hebben => preëmptief onderbreken proces met laagste
prioriteit)
Onderbreken heeft alleen zin bij bronnen waarvan de toestand gemakkelijk kan worden opgeslagen en
hersteld, zoals bij de processor
Cirkelvormig wachten
Dit is de directe manier
door het definiëren van een lineaire rangorde van soorten voorzieningen:
aan een proces zijn bronnen toegewezen van het soort R, dan mag dit proces enkel nog maar
verzoeken om bronnen met een hogere rangorde dan R
volgende situatie kan dan niet meer:
P1 heeft bron Ri bezet en vraagt om bron Rj
P2 heeft bron Rj bezet en verzoekt om Ri
Dit kan niet want als i < j dan kan j !< i dus deze deadlock is opgelost want P2 mag Ri niet aanvragen
Inefficiënt want het vertraagt de processen en weigert onnodig de toegang tot bronnen (omdat dit in
een bepaalde volgorde moet gebeuren, zelfs al zijn de bronnen vrij)
Vermijden van deadlock
voorkomen deadlock: beperkingen opleggen aan bronaanvragen om zo minstens 1 van de vier
voorwaarden te omzeilen => inefficiënt gebruik van systeembronnen en inefficiënte uitvoering van
processen
vermijden van deadlock: de eerste drie voorwaarden zijn toegestaan maar er worden keuzes gemaakt
om er voor te zorgen dat het nooit tot een deadlock komt
=> er is meer ruimte voor gelijktijdigheid
maar, dit vereist wel dat op voorhand geweten is om welke bronnen zal gevraagd worden
2 benaderingen om deadlock te vermijden:
1. een proces waarvan de bronaanvragen tot een dead lock kunnen leiden niet starten
2. wanneer een bronaanvraag van een proces kan leiden tot een deadlock, dan wordt deze
aanvraag niet verwerkt
Weigeren van een nieuw proces
Zeer inefficiënt:
Gaat ervan uit dat alle processen tegelijkertijd hun maximale claim kunnen maken
=> een nieuw proces wordt alleen gestart als het systeem alle bronnen die de reeds bestaande
processen kunnen opvragen aan die processen kunnen worden toegewezen en als de bronnen die het
nieuw proces kan aanvragen ook kunnen worden toegewezen
Probleem: het is niet omdat twee processen een bron tegelijkertijd kunnen opvragen dat dat daarom
ook zo is
Weigeren om bronnen toe te wijzen
Dit werkt volgens het bankiersalgoritme van Dijkstra.
Er worden 2 soorten toestanden onderscheiden:
veilige toestand: er is op zijn minst 1 manier waarop de processen bronnen toegewezen
kunnen krijgen die niet leidt tot een deadlock
onveilige toestand: een mogelijke deadlocksituatie (die wordt vermeden door het systeem
door de bronaanvraag niet te behandelen en het proces dat de aanvraag doet te blokkeren)
zie fig 6-7
op die figuur is een voorbeeld te zien van een veilige toestand, immers, er is op zijn minst 1 manier
waarop de verschillende processen kunnen uitgevoerd worden die niet leidt tot een deadlock
fig 6-8 p301: onveilige situatie
P1 verzoekt om 1 allocatie van bron 1 en 1 van bron 3 => er zijn geen instanties meer van bron 1
terwijl er daar minstens 1 van nodig is opdat er een proces is dat volledig kan uitgevoerd worden =>
het toewijzen van de bronnen aan proces 1 leidt tot een deadlock en dit wordt voorkomen door deze
aanvraag te negeren en P1 te blokkeren waardoor een ander proces actief wordt (hopelijk P2) dat een
aanvraag doet die NIET leidt tot een deadlock
m.a.w. er is geen deadlock opgetreden, er was alleen een toestand waarin er een kon optreden. Want
het kan bvb zijn dat P1 achtereenvolgens weer 1 instantie van R1 en R3 vrijgeeft voordat het deze op
een later tijdstip weer nodig heeft. Dus: het op deze manier vermijden van een deadlock gaat ook voor
de zekerheid (terwijl het niet altijd zeker is dat een onveilige toestand ook daadwerkelijk leidt tot een
deadlock) maar het is al wel efficiënter dan de andere vermijdingsstrategie.
Er wordt voorkomen dat een deadlock voorkomt, zelfs al kan het zijn dat deze er nooit zou gekomen
zijn had men de bronaanvraag wel verwerkt
Dus:
proces doet verzoek om bron
=> stel dat aan verzoek wordt tegemoetgekomen: is het resultaat een veilige toestand?
=> als (veilige toestand) voldoe aan verzoek
anders blokkeer proces en geef geen gehoor aan verzoek
Voordelen vermijdingsstrategie:
het is niet nodig processen preëmptief te onderbreken <-> detecteren
het is minder beperkend dan deadlock voorkomen
Beperkingen voor het gebruik:
per proces moet het maximaal aantal vereiste bronnen gekend zijn
de processen die zo worden beoordeeld moeten onafhankelijk zijn: hun volgorde mag nog niet
beperkt zijn door een vereiste synchronisatie
er moet een vast aantal toe te wijzen bronnen zijn
een proces mag niet worden beëindigd terwijl het bronnen vasthoudt, want dan is er geen nood
aan dit systeem, dan kan men gewoon bij een tekort aan bronnen, een proces beëindigen en
zijn bronnen recupereren
Nadeel van vermijden:
het is een (zeer) voorzichtige strategie (bij het niet starten van een nieuw proces zeker) wat
leidt tot inefficiëntie want het kan zijn dat men een proces niet uitvoert/blokkeert terwijl dat
mss helemaal niet nodig was geweest (maar dat weet het systeem pas als het mss te laat is so
'better safe than sorry')
Detecteren van deadlock
Deadlocks vermijden: beperkingen opleggen aan processen en het beperken van toegang tot
voorzieningen
Deadlocks detecteren:
geen beperkingen
er wordt, in de mate van het mogelijke aan alle bronaanvragen tegemoetgekomen
periodiek voert het OS een algoritme uit om 'cirkelvormig wachten' vast te stellen
Algoritmen voor detecteren deadlock
Ingrediënten:
een matrix van nodige bronnen per proces
matrix van reeds gealloceerde bronnen per proces
vector nog beschikbare bronnen
vector totaal aantal instanties per bron
Stappen:
1. markeren van alle processen waaraan geen enkele bron is toegewezen (dus overal nullen in de
'Allocation' matrix)
2. initialisatie van een tijdelijke vector W die gelijk is aan de vector van nog beschikbare
bronnen
3. op zoek naar een proces waarvoor geldt dat het aantal geclaimde instanties van bronnen
(matrix Q) kleiner of gelijk is aan het aantal nog beschikbare instanties
4. => wordt zo een proces niet gevonden => algoritme beëindigen; wordt dat wel gevonden =>
dat proces markeren en de instanties van bronnen uit de matrix Allocation die bij dat proces
horen worden bij W opgeteld en we gaan verder
Wanneer deadlock:
er is sprake van een deadlock als er aan het einde van het algoritme nog ongemarkeerde processen zijn
(deze zitten in een deadlock); een proces wordt immers gemarkeerd wanneer het geen bronnen meer
vasthoudt en dus ook niet nuttig is voor het vrijgeven van bronnen na uitvoering van het proces
Herstel
4 mogelijke methoden; 1 is de minst geavanceerde -> 4, de meest geavanceerde
1. afbreken van alle processen met een deadlock: meest gebruikte methode in OS
2. rollback van elk proces met een deadlock tot een bepaald punt en herstart alle processen
(vereiste is dat rollback en restart zijn ingebouwd in het systeem). Risico dat de deadlock
opnieuw zal gebeuren maar aangezien de volgorde bij gelijktijdige verwerking niet vastligt en
de processen dus hoogstwsl in een andere volgorde zullen worden uitgevoerd is de kans groot
dat de deadlock niet plaatsgrijpt
3. beëindig na elkaar de processen met een deadlock totdat de deadlock niet meer bestaat. Na
elke beëindiging moet het algoritme worden uitgevoerd om na te gaan of er nog een deadlock
is. De volgorde van beëindiging moet zo zijn dat dit minimale kosten met zich meebrengt
4. Preëmptief bronnen afnemen van de processen totdat deadlock niet meer bestaat. Na elke
preëmptieve onderbreking moet het algoritme worden uitgevoerd om na te gaan of er nog een
deadlock is + rollback van een dergelijk proces tot het punt voorafgaand aan de toewijzing
van de zojuist afgenomen bron aan dat proces.
Op basis waarvan worden in 3 en 4 processen beëindigd of bronnen afgenomen:
processen die het minste processortijd hebben ingenomen
processen met de laagste prioriteit
de langste resterende duur heeft
de kleinste hoeveelheid toegewezen bronnen heeft
Geïntegreerde aanpak van deadlock
Het zou beter zijn dat een systeem, ipv 1 strategie te gebruiken, er meerdere kan toepassen, al
naargelang de vereiste daartoe.
Zo kan het handig zijn:
de bronnen in te delen in een aantal klassen
de strategie ter vermijding van cirkelvormig wachten te gebruiken om deadlock te voorkomen
tussen klassen van bronnen te voorkomen
om per klas een strategie te gebruiken die het best past bij de soorten van bronnen in die klasse
Mogelijke klassen van bronnen:
swap-ruimte: geheugen gebruikt voor geswapte processen
procesbronnen: apparaten die kunnen worden toegewezen(diskettestation, bestanden)
hoofdgeheugen: pagina's of segmenten die aan processen kunnen worden toegekend
interne bronnen: bvb I/O kanalen
aanpak om deadlock te vermijden binnen elke klasse:
swap-ruimte:
voorkomen van deadlock door te eisen dat een proces in één keer alle bronnen aanvraagt
en dit zolang te blokkeren zolang een bron niet vrij is (vasthouden en wachten); dit kan
hier werken omdat dit vereist dat de maximaal vereiste opslagruimten bekend zijn, wat
hier zo is
vermijden van deadlock
procesbronnen:
voorkomen door een rangorde aan te brengen (=> cirkelvormig wachten opheffen)
vermijden van deadlocks: gaat omdat de processen in deze klasse vooraf aangeven welke
voorzieningen ze denken te zullen nodig hebben
hoofdgeheugen:
voorkomen: processen preëmptief te onderbreken => proces wordt geswapt naar
swapgeheugen => er komt ruimte vrij om deadlock op te lossen
interne bronnen:
voorkomen door gebruik van rangorde
Probleem van de dinerende filosofen
Beginsituatie:
5 filosofen
1 tafel met 5 borden en 5 vorken
spaghetti wordt gegeten met de twee vorken naast het bord
Beperkingen:
moet voldoen aan wederzijdse uitsluiting: een vork mag niet tegelijkertijd door meerdere
filosofen worden gebruikt
geen deadlock of uithongering
p306flock://favorites/urn:flock:feed:http%3A%2F%2Fwww.deredactie.be%2Fcm%2Fde.redactie
%2Fnewswire%3Fmode%3Datom
6.6.1 Een oplossing met semaforen
uitsluiting van deadlock door het aantal processen aan tafel te beperken tot aantal processen – 1 => er
is minstens 1 proces dat de nodige bronnen kan gebruiken en volledig kan uitgevoerd worden
6.6.2 Een oplossing met een monitor
vector met 5 conditievariabelen: 1 per vork
vector met 5 booleans: na te gaan of een vork beschikbaar is, als dat niet is, dan moet het proces in de
wachtrij van die vork
Mechanismen voor gelijktijdigheid in UNIX
Pijpen
een cirkelvormige buffer waarmee 2 processen kunnen communiceren
(producent/consumentmodel) => FIFO wachtrij die wordt geschreven door het ene en gelezen
door het andere proces
de pijp heeft een vaste grootte aan bytes => wil een proces meer schrijven dan erin kan of wil
een proces meer bytes lezen dan erin staan => proces wordt geblokkeerd, zoniet, dan wordt
het schrijf-of leesverzoek meteen ingewilligd
twee soorten: benoemde(named) en naamloze(nameless) pipe: gerelateerde processen
kunnen een nameless pipe gebruiken <-> processen zonder relatie kunnen alleen een
benoemde pipe gebruiken
Berichten
Bericht: tekst dat vergezeld gaat van een type
proces heeft een wachtrij (postvak); een ander proces stuurt een bericht naar een ander proces
zijn postvak. Dat proces kan berichten lezen, ofwel FIFO, ofwel op basis van het type
proberen sturen naar een vol postvak => opschorten vd zender
proberen lezen uit een leeg postvak => opschorten vh proces
een proces wordt NIET opgeschort wanneer het een bericht niet kan lezen
Gedeeld geheugen
snelste vorm van communicatie tss processen
processen lezen en schrijven van en naar een gedeeld stuk virtueel geheugen
processen kunnen alleen-lezen of alleen-schrijven zijn
wederzijdse uitsluiting is een vereiste aangezien er niet én gelezen en tegelijkertijd geschreven
mag worden of door twee processen tegelijkertijd mag geschreven worden
Semaforen
Door het gebruik van gewone (dus geen binaire) semaforen kunnen verschillende processen
tegelijkertijd worden uitgevoerd
de kernel voert alle gevraagde bewerkingen uit op atomair niveau: geen enkel ander proces
krijgt toegang tot de semafoor tot de bewerkingen gedaan zijn
Signalen
softwaremechanisme dat een proces informeert over asynchrone gebeurtenissen
gelijkwaardig aan interrupt maar kent geen prioriteit => worden allemaal gelijkwaardig
behandeld
wordt verstuurd door processen onderling of door de kernel
reactie van een proces op een signaal:
signaal negeren
standaardactie
functie voor signaalafhandeling uitvoeren
Geheugenbeheer
Effectief geheugenbeheer is essentieel bij een systeem met multiprogrammering. Geheugen moet
efficiënt worden toegewezen om zoveel mogelijk processen in het geheugen te laden zodat de
processortijd optimaal benut wordt.
Vereisten voor geheugenbeheer
Relocatie
De programmeur weet meestal niet waar het programma in het geheugen geplaatst zal worden bij
uitvoering. Tijdens uitvoering van het programma kan het terug naar schijf geswapt worden om dan
terug naar het geheugen geplaatst te worden op een andere locatie.
Het OS moet de locatie kennen van de procesbesturingsinformatie en van de uitvoeringsstack. Het
moet ook weten op welk adres de uitvoering van het programma begint. De processor moet echter ook
in staat kunnen zijn om verwijzingen naar code, die in het programma gebeuren, te kunnen omzetten
naar een echt adres in het geheugen. Sprongopdrachten bevatten een adres dat verwijst naar de
volgende uit te voeren instructie.
Dit heeft natuurlijk ook implicaties voor het OS, dat verwijzingen in de code gaat moeten
omzetten/translateren naar echte fysische adressen.
Bescherming
Processen moeten beschermd worden tegen verstoringen door andere processen :
• Processen mogen niet zonder toestemming naar geheugenlocaties in andere processen
verwijzen.
• Bij Relocatie is de locatie van een programma in het hoofdgeheugen onbekend, dus is het
onmogelijk absolute geheugenadressen te controleren bij het compilen.
• Geheugenverwijzingen moeten dus at run time gecontroleerd worden.
• De vereisten voor geheugenbescherming moeten voldaan zijn door de processor ( hardware )
in plaats van door het besturingssysteem ( software )
o
Het BS kan niet anticiperen op alle geheugenverwijzingen die een programma kan gebruiken.
Delen
Bescherming van de processen is noodzakelijk maar het moet wel mogelijk zijn dat processen
bepaalde delen van het geheugen delen. Het is ook beter om elk proces toegang te geven tot hetzelfde
exemplaar van het programma , in plaats van dat elk proces zijn eigen kopie gebruikt. Dit is het
overmatig gebruiken van het werkgeheugen.
Logische indeling
De meeste programma’s zijn ingedeeld in modules, waarvan sommige niet kunnen worden gewijzigd
(alleen lezen, … ) en waarvan andere modules gegevens bevatten die wel mogen worden gewijzigd.
Voordelen van modules :
• Modules kunnen onafhankelijk worden geschreven en gecompileerd. Waarbij alle
verwijzingen van de ene naar de andere module tijdens de uitvoering worden ingevuld door
het systeem
• Verschillende modules kunnen andere beschermingsniveaus krijgen ten koste van wat
overhead.
• Het wordt mogelijk mechanismen te maken waarbij processen modules kunnen delen.
Fysieke indeling
Hoofdgeheugen(main memory)
Secundair geheugen(secondary memory)
snelle toegang
langzaam
vluchtig: geen permanente opslag
wel permanente opslag
duur
goedkoop
Het hoofdgeheugen wordt gebruikt voor programma’s die in gebruik zijn en de secundaire voor het
opslagen van andere programma’s.
Er moet informatie kunnen worden uitgewisseld tussen hoofdgeheugen en secundair geheugen. De
verantwoordelijkheid hiervoor ligt echter niet bij de programmeur want:
het kan zijn dat het beschikare geheugen kleiner is dan de plaats die nodig is voor een programma => de
programmeur moet een techniek toepassen (overlay): meerdere modules kunnen worden toegekend aan
hetzelfde geheugengebied, het is aan het hoofdprogramma om te zorgen dat de modules gewisseld
worden. Het gebruik van overlays is echter tijdsabsorberend
bij een systeem van multiprogrammering weet een programmeur op voorhand niet hoeveel ruimte er zal
vrij zijn en waar die ruimte zal zijn => de programmeur kan geen boodschappen inbouwen waarbij er
iets gezegd wordt over geheugenlocaties omdat deze niet vastliggen
Partitioneren van geheugen
Belangrijkste taak geheugenbeheer: het inladen van processen zodat ze kunnen uitgevoerd worden. In
bijna alle moderne systemen wordt daarvoor virtueel geheugen gebruikt: d.i. gebaseerd op twee
basistechnieken: pagineren en segmenteren.
Vaste indeling van Partities
Bij de meeste vormen voor geheugenbeheer mogen we aannemen dat het besturingssysteem een vast
deel van het hoofdgeheugen bezet en dat de rest van het hoofdgeheugen beschikbaar is voor gebruik
door meerdere processen.
Grootte van Partities
Partities met een vaste grootte kennen twee problemen.
• Een programma kan te groot zijn om in een partitie te passen. Dan moet de programmeur het
programma ontwerpen dat overlays gebruikt, zodat altijd maar een deel van het programma
zich in het hoofdgeheugen hoeft te bevinden. Is er een module nodig die nog niet aanwezig is ,
dan moet het gebruikersprogramma dit in de partitie van het programma laden en de
programma’s of gegevens die zich daar bevinden vervangen.
• Er is een inefficiënt gebruik van het geheugen: Elk proces hoe klein ook , bezet meteen een
hele partitie => interne fragmentatie
Bij gebruik van Partities van ongelijke grootte is er minder interne fragmentatie.
Plaatsingsalgoritme
Bij Partities van gelijke grootte speelt de plaatsing van processen nauwelijks een rol. Zolang maar een
partitie beschikbaar is, kan een proces in die partitie geplaatst worden.
Bij Partities met een ongelijke grootte kan:
1. men een proces vast toewijzen aan de kleinste partitie waar het in past. Elke partitie heeft een
wachtrij en processen
Voordeel: er is een minimalisatie van interne fragmentatie
2. men gebruik maken van 1 wachtrij : als er bvb een proces van < 8mb ingeroosterd moet
worden en de Partities van 8 mb zijn op, dan zal er niet gewacht worden maar het proces zal
worden geplaatst in een partitie van een grotere grootte.
Bovendien kan gezegd worden dat systemen met vaste partitionering relatief eenvoudig zijn en
nauwelijks besturingssysteemsoftware en verwerkingsoverhead vereisen. Er zijn echter nadelen :
• beperking van het aantal ( niet – opgeschorte ) processen in het geheugen
• kleine processen zorgen voor inefficiënt geheugengebruik ( interne fragmentatie )
Dynamische indeling van partities
Bij dynamisch Partitioneren wordt een variabel aantal Partities van variabele grootte gebruikt.
=> wordt een proces overgebracht naar het geheugen, dan krijgt het de hoeveelheid geheugen dat het
nodig heeft en niet meer.
Nadeel: na verloop van tijd ontstaan er vele kleine gaten in het geheugen die elk apart te klein zijn om
een proces te kunnen bevatten: externe fragmentatie : het geheugen wordt buiten de partities
gefragmenteerd <-> interne fragmentatie: binnen de partities zelf.
Een oplossing voor deze externe fragmentatie is compaction: van tijd tot tijd worden de processen
herschoven binnen het geheugen zodat ze aanééngesloten zijn en al het vrije geheugen 1 blok vormt.
Er is wel een nadeel : compaction is verspilling van veel processortijd. Een vereiste voor compaction
is dynamische Relocatie : het moet mogelijk zijn een programma te verplaatsen van het ene naar het
andere gebied zonder de geheugenverwijzingen in het programma ongeldig te maken.
Plaatsingsalgoritme
1. Best-fit
het toewijzen van een zo klein mogelijke, niet-bezet blok geheugen aan een proces
2. First-fit
doorzoekt het geheugen vanaf het begin en wijst het eerste niet-bezette blok toe aan een
proces. Dit werkt het snelst.
3. Next-fit
doorzoekt het geheugen vanaf de plaats waar de laatste plaatsing is gebeurd en wijst het
volgende beschikbare blok toe dat groot genoeg is. Dit algoritme zal vaker geheugen
toewijzen dat zich aan het einde van het geheugen bevindt
Nadelen per strategie:
1. Best-Fit: Geheugencompactie moet vaker gebeuren dan bij de andere algoritmes:
hoofdgeheugen raakt veel sneller vervuild met kleine blokken vrij geheugen die niet bruikbaar
zijn om processen aan toe te wijzen => best-fit presteert het slechtst
2. First-fit: het voorste deel van het geheugen gaat snel volzitten met kleine blokken die té klein
zijn voor processen. Het probleem is dat deze toch worden doorzocht bij aanvang van het
algoritme
3. Next-fit: het grootste blok vrije geheugen (einde van het geheugen) wordt vrij snel opgesplitst
in kleine delen => compaction zal vaker nodig zijn
Vervangingsalgoritme
Om te voorkomen dat processortijd wordt verspild aan wachten tot een wachtend proces
gedeblokkeerd raakt, swapt het besturingssysteem een van de processen uit het hoofdgeheugen om
ruimte vrij te maken voor een nieuw proces of een proces in de toestand Gereed-opgeschort. Het
besturingssysteem moet hierbij beslissen welk proces wordt vervangen.
Buddysysteem
Zowel vaste als dynamische partitionering hebben nadelen:
vast: beperkt het aantal actieve processen en inefficiënt geheugengebruik
dynamisch: veel onderhoud en overhead door compaction
volledig beschikare ruimte = 2u
wanneer nu een proces moet worden toegewezen aan geheugen, dan wordt gecontroleerd of 2u-1 < s <
2u
->als dat zo is, dan wordt het hele geheugenblok toegewezen aan het proces
-> als dat niet zo is, dan wordt het blok opgedeeld in twee gelijke 'buddies' en wordt terug nagekeken
of 2u-1 < s < 2u totdat dit zo is en het proces kan worden toegewezen
Het buddysysteem omzeilt de problemen van vaste en dynamische partitionering MAAR het
virtueel geheugen, gebaseerd op pagineren en segmenteren is veel beter.
Relocatie
vaste partitionering met één wachtrij per partitie (fig 7-3a):
een proces heeft een vaste partitie => lader met relocatie: wanneer een proces de eerste keer wordt
geladen worden de relatieve verwijzingen in de code veranderd in absolute adressen adhv het
basisadres van het in te laden proces(dit kan aangezien het altijd aan dezelfde partitie wordt
toegewezen)
partities van gelijke grootte (fig 7-2) + vaste partitionering met 1 wachtrij voor het hele
geheugen(7-3b) + dynamische partitonering:
een proces kan per keer dat het ingeladen wordt toegewezen worden aan een andere partitie (bij dyn.
zelfs bij compactie)
=> de uitvoeringscode staat telkens op een ander adres
Om dit probleem op te lossen maakt men een onderscheid tussen verschillende soorten adressen:
logisch adres: verwijzing naar een locatie onafhankelijk van de huidige toewijzing van
gegevens aan het geheugen; een logisch adres moet eerst vertaald worden naar een fysisch
adres voordat geheugentoegang mogelijk is
relatief adres: een verwijzing naar een locatie vanaf een bepaald punt, doorgaans is dit punt
het begin van het programma
fysisch adres: het absolute of de echte locatie in het hoofdgeheugen
Om een programma te kunnen uitvoeren moeten de relatieve adressen worden omgezet naar absolute
adressen, dit gebeurt hardwarematig
proces wordt actief => beginadres wordt ingeladen in basisregister <-> grensregister, bevat het
eindadres van het programma (beginadres en einde worden bepaald wanneer een programma in het
geheugen wodt geladen of wanneer het procesbeeld naar het geheugen wordt geswapt)
elk relatief adres ondergaat twee bewerkingen in de processor:
1. eerst wordt de waarde van het basisregister opgeteld bij het relatief adres om een
absoluut adres te krijgen (beginadres + relatief adres = absoluut adres)
2. dat absoluut adres wordt vergeleken met het adres in het grensregister
=> ligt het verkregen adres niet tussen de grenzen => er wordt een interrupt
gegenereerd naar het OS dat moet reageren op deze fout
ligt het wel tussen de grenzen, dan mag er verdergegaan worden met de uitvoering
van de instructie
Pagineren
Partities met een vaste of variabele grootte maken beide inefficiënt gebruik van het geheugen.
De vaste grootte leidt tot interne fragmentatie
De variabele grootte leidt tot externe fragmentatie
Pagineren is het geheugen opdelen in kleine stukken van vaste grootte en welke allemaal even groot
zijn. Deel nu elk proces op in stukken van dezelfde grootte. Dergelijke stukken worden pagina’s
genoemd. De stukken van het geheugen worden frames genoemd.
Het besturingssysteem houdt een pagina tabel bij voor elk proces. Deze tabel bevat
• De frame locatie voor elke pagina in het proces
• Een geheugenadres bestaande uit een paginanummer en een offset binnen die pagina.
Bovenstaande figuur illustreert het gebruik van pagina’s en frames. Op een bepaald moment zijn
sommige frames in het geheugen bezet en zijn andere vrij. Het besturingssysteem houdt een lijst bij
van vrije frames. De figuur verduidelijkt zichzelf.
Het logische adres is de relatieve locatie van een byte of woord ten opzichte van het begin van het
programma. De processor vertaalt dit in een fysiek adres.
Voor adresvertaling bij paginering zijn volgende stappen nodig:
• Haal het paginanummer uit de linker n bits van het logische adres
• Gebruik het paginanummer als inde in de procespaginatabel om het framenummer k te vinden.
• Het fysieke beginadres van het frame is k * 2m , en het fysieke adres van de gezochte bye is
gelijk aan dit nummer plus de positie. Dit fysieke adres hoeft niet te worden berekend. Het
wordt eenvoudig gevormd door het framenummer toe te voegen aan de positie.
Segmenteren
Het alternatief voor het opdelen van een gebruikersprogramma is het segmenteren. Het programma
met zijn bijhorende gegevens wordt opgedeeld in een aantal segmenten.
Alle segmenten van alle programma’s hoeven niet dezelfde grootte te hebben , maar er is wel een
maximumgrootte vastgesteld.
Vermits segmenten niet even groot zijn , is segmenteren gelijkaardig aan dynamische partitionering.
Segmentatie voorkomt interne fragmentatie maar leidt, net als een dynamische partitionering tot
externe fragmentatie.
Net als bij paginering gebruikt eenvoudige segmentatie een segmenttabel voor elk proces en een lijst
van vrije blokken in het hoofdgeheugen. Elke ingang in een segmenttabel vebat het beginadres van het
bijbehorende segment in het hoofdgeheugen. De ingang bevat ook informatie over de lengte van het
segment, om te voorkomen dat ongeldige adressen worden gebruikt.
Voor adresvertaling bij segmenteren zijn de volgende stappen nodig:
• Haal het segment nummer uit de linker n bits van het logische adres.
• Gebruik het segmentnummer als index in de segmenttabel van het proces om het fysieke
beginadres van het segment te vinden.
• Vergelijke de positie, die is vastgelegd in de rechter m bits, met de segment lengte. Is de
positie groter dan de lengte , dan is het adres ongeldig.
Virtueel geheugen
Hardware en besturingsstructuren
Eigenschappen pagineren en segmenteren:
1. relocatie: een proces kan gedurende verschillende momenten verschillende geheugenlocaties
innemen wanneer het wordt weggeswapt en weer wordt teruggeswapt. Dit komt omdat de
adressering die gebruikt wordt dit toelaat (= at runtime vertaling <-> tijdens compilen want de
adressen staan niet hard gecodeerd)
2. proces kan opgebroken worden in meerdere stukken (pagina's of segmenten)
3. de stukken moeten niet aaneengesloten zijn om te kunnen uitgevoerd worden
GEVOLG: het is niet nodig dat een volledig proces(alle pagina's/segmenten) in het hoofdgeheugen
staat wanneer het uitgevoerd wordt (het stuk met de volgend uit te voeren instructie en met de
volgende te gebruiken geheugen locatie is genoeg)
Werking:
nieuw proces moet worden ingeladen: OS laadt het begin van het proces in en het deel dat de
gegevens bevat waarnaar de instructies verwijzen (residente set = deel v/e proces dat zich
werkelijk in het hoofdgeheugen bevindt)
de processor kan nagaan of de geheugenverwijzingen nog steeds ingeladen zijn. Dit wordt
gecontroleerd adhv de logische adressen enerzijds adhv de segment-of paginatabel anderzijds
wanneer logisch adres niet meer in het hoofdgeheugen => processor genereert interrupt => OS
blokkeert proces => I/O verzoek om het nodige deel van het proces te lezen vd harde schijf =>
terwijl dat bezig is wordt een ander proces uitgevoerd
OS krijgt een interrupt dat I/O bewerking compleet is en zet proces terug in de wachtrij
'Gereed'
Gevolgen:
1. er kunnen zich meer processen in het geheugen bevinden => efficiënter gebruik van de
processor omdat de kans hoger is dat er ten minste één proces 'Gereed' is
2. een proces kan groter zijn dan het totale hoofdgeheugen: (dit geldt uiteraard niet voor de
residente set) <-> geen segmenteren of pagineren, dan moet de programmeur zich wenden tot
het gebruik van overlay terwijl nu is er voor de programmeur 1 groot geheugen dat beheerd
wordt door de hardware en het OS
Twee soorten geheugen:
1. reële geheugen (de plaats waar processen uitgevoerd worden)
2. virtuele geheugen (de ruimte die wordt toegewezen op schijf)
Lokaliteit en virtueel geheugen
Virtueel geheugen op basis van uitsluitend pagineren of de combinatie van pagineren en segmenteren
is een essentieel onderdeel geworden van de meeste hedendaagse besturingssystemen.
Trashing: wanneer de processor meer bezig is met het in en uitswappen van processen dan met de
uitvoering ervan. Dit gebeurt wanneer het reële geheugen overvol zit en er continu processen moeten
uitgeswapt worden om plaats te maken voor andere stukken van een proces. Wanneer een uitgeswapt
deel echter meteen weer nodig is, dan moet dit worden ingeswapt. Veel swappen dus en weinig
uitvoer.
Trashing voorkomen door te voorspellen welke delen van een proces in de nabije toekomst zullen
nodig zijn op basis van het recente verleden.
Dit is gebaseerd op het lokaliteitsbeginsel: verwijzingen naar programma's en gegevens van
processen hebben de neiging op te hopen tot een cluster => het is geldig om te veronderstellen dat
slechts een deel van een proces nodig is voor een beperkte tijd => het is mogelijk om een voorspelling
te maken van de stukken die zullen nodig zijn in de nabije toekomst wat trashing voorkomt
fig8-1 illustratie van lokaliteitsbeginsel
=> virtueel geheugen kan werken aangezien er een voorspelling kan gemaakt worden en trashing kan
voorkomen worden, anders was het maar een slecht idee aangezien het na verloop van tijd aanleiding
zou geven tot trashing
Wat nodig voor virtueel geheugen:
1. hardwareondersteuning: toepassen paginering en segmentering + vertaling van adressen
2. softwareondersteuning: beheren van de verplaatsing van delen proces tussen hoofd-en
secundair geheugen
Pagineren
Elk proces heeft paginatabel: iedere ingang = framenummer voor de bijhorende pagina in het
hoofdgeheugen.
Pagineren + gebruik van virtueel geheugen => complexer want het kan nu zijn dat er slechts een deel
van een proces in het geheugen staat => elke page table entry (PTE) bevat nu ook een bit die aangeeft
of de pagina in het hoofdgeheugen zit of niet (de present- bit of de p-bit)
Een andere bit die aanwezig is in de PTE, is de m(odify)-bit: geeft aan of de pagina gewijzigd is, is
dat niet zo, dan moet de pagina niet worden weggeschreven naar het virtueel geheugen bij het
swappen aangezien beide versies nog gelijk zijn => efficiënter gebruik maken van het systeem.
Paginatabelstructuur
lezen van een woord uit het geheugen: vertalen van een virtueel (logisch)
adres(paginanummer en offset) in een fysiek adres(framenummer en offset)
paginatabel heeft variabele grootte (afhankelijk van grootte proces) => niet opslaan in
registers maar in hoofdgeheugen
(zie fig 8-3) proces wordt uitgevoerd => register bevat beginadres van de paginatabel van het
proces
het paginanummer wordt gebruikt als index in de tabel om het bijhorende framenummer op te
zoeken
reëel adres = framenummer + offset
De meeste systemen gebruiken 1 paginatabel per proces <-> VAX: ieder proces kan 231 (2 G) groot
zijn. Stel: paginagrootte: 512 byte => 222 PTE's => Paginatabel = enorm => paginatabel wordt ook
ingedeeld in pagina's en wordt opgeslaan in virtueel geheugen. => wordt een proces uitgevoerd, dan
moet er een deel van de paginatabel in het hoofdgeheugen staan en al zeker de PTE van de huidige
pagina.
Sommige systemen gebruiken een systeem met twee niveaus: bevat een paginadirectory (elke ingang
van deze directory verwijst naar een paginatabel). Is de lengte van het paginaoverzicht X en is de
lengte vd paginatabel Y, dan bestaat een proces uit X*Y pagina's
stel:
adressen van 32 bits
paginagrootte: 212 (kB) => virtueel geheugen van 232 bytes (4GB) kan 220 aantal pagina's
bevatten
iedere PTE = 4B => de volledige paginatabelgrootte = 220 * 4 = 222 bytes(4MB)
=> mogelijkheid om een gebruikerspaginatabel van 210 pagina's in het virtueel geheugen te
hebben en bereikbaar te maken a.d.h.v. een basispaginatabel met 210 PTE's en een grootte van
212 (4 kB) in het hoofdgeheugen. De basispaginatabel blijft altijd in het hoofdgeheugen!
fig 8-5 adresvertaling bij een systeem met twee niveaus:
eerste 10 bits van virtuele adres = index in de basispaginatabel om de PTE te verkrijgen voor
een pagina in de gebruikerspaginatabel(paginafout: refereren naar een pagina die niet
aanwezig is in hoofdgeheugen).
is de pagina wel aanwezig in het hoofdgeheugen, dan zijn de volgende 10 bits in het adres de
index in de gebruikersPTE-pagina om de PTE te vinden van de pagina waarnaar verwezen
wordt in het virtuele adres
Geinventeerde paginatabel
Nadeel van hogergenoemde paginatabellen is dat de grootte ervan evenredig is met de omvang van de
virtuele adresruimte.
Bij een ander type paginatabel is dit niet, hierbij wordt er gewerkt met een geïnverteerde
paginatabelstructuur (indexeert de items op framenummer ipv op virtueel paginanummer) waarbij het
paginanummer (onderdeel van virtueel adres) gehashed wordt en deze hash verwijst naar de
geïnverteerde paginatabel. Deze tabel heeft een vaste grootte, namelijk als een fysiek geheugen 2m
frames bevat dan is er plaats in de tabel voor 2m items waarbij item z verwijst naar frame i.
De geïnverteerde paginatabel bevat 1 item voor elke werkelijke frame ipv 1 item per virtuele pagina
collision (de hashes van twee verschillende paginanummers zijn gelijk) is mogelijk => er wordt
gewerkt met een kettingtechniek om toch tot het juiste adres te komen
Ieder item in de geïnverteerde paginatabel bevat volgende gegevens:
Paginanummer: (paginanummer virtueel adres)
PID: proces dat deze pagina in bezit heeft (combinatie paginanummer-PID is uniek => kan
gebruikt worden als er collision is bij hashing)
Besturingsbits: bvb.: modified, referenced, valid, beveiligings- en vergrendelingsinfo
Kettingpointer: is 0 als er geen koppelingen zijn met andere pagina's. bevat een nummer van
2m-1 dat het rangnummer is in de tabel van het volgende item in de ketting
Translation lookaside buffer
Elke virtuele verwijzing naar het virtuele geheugen kan twee dingen veroorzaken in het fysieke
geheugen:
ophalen van gegevens
ophalen van de juiste PTE
Als beiden moeten gebeuren tgv dezelfde verwijzing, dan moet er eerst gezocht worden naar de juiste
PTE èn dan nog eens naar de juiste gegevens op de schijf => verdubbeling van geheugentoegangstijd.
Dit wordt opgelost door TLB = speciale cache voor paginatabelingangen; bevat de PTE's die recent
het meest gebruikt zijn
Werking:
processor ontvangt een virtueel adres
is de gewenste PTE in de TLB, dan wordt het framenummer opgevraagd en wordt het reële
adres gevormd, samen met de offset
TLB-miss => met paginanummer als index kijken of de 'present' bit van de pagine in de PTE
in de paginatabel op 1 staat => pagina staat in het hoofdgeheugen => het framenummer wordt
opgevraagd uit de PTE en het reële adres wordt gevormd + de TLB wordt bijgewerkt door
deze nieuwe PTE toe te voegen
is de p-bit 0 => paginafout en dan verlaten we de hardware om het OS de pagina re laten laden
en om de paginatabel bij te werken
Opmerking bij stroomschema p379 (fig 8-8): wanneer I/O bewerking gebeurt voert processor
ondertussen ander proces(sen) uit.
Overeenkomstig het beginsel van lokaliteit: de meeste verwijzingen naar virtueel geheugen zijn
verwijzingen naar locaties in recent gebruikte pagina's
Het opzoeken in de TLB gaat sneller dan het opzoeken in de paginatabel omdat het gaat om
cachegeheugen!
associatieve vertaling (associative mapping): de hardware is in staat om verschillende TLB entries
tegelijkertijd te doorzoeken (daarom is het nodig dat iedere TLB ingang naast het paginanummer ook
de volledige PTE bevat)
Directe vertaling die gebruikt wordt om op te zoeken in de paginatabel
Het gebruik van een TLB vereist interactie met de hoofdgeheugencache. Stel dat de PTE zich in de
TLB bevond of in de paginatabel na een TLB-miss, dan wordt het reëel adres gevormd. Dan wordt er
in de hoofdgeheugencache nagekeken of het blok met het vereiste woord zich daarin bevindt. Is dat
niet zo, dan moet de processor het inladen uit het hoofdgeheugen.
Paginagrootte
Afweging: hoe groot moet een pagina nu zijn? Is een kleine beter dan een grote?
hoe kleiner een pagina des te kleiner is de interne fragmentatie MAAR des te groter is het
aantal pagina's dat het proces nodig heeft (en dus ook meer pagina's die moeten aanwezig zijn
in het geheugen => kans ++ dat er veel gaat moeten ingeladen worden uit virtueel geheugen)
=> een deel van de paginatabellen van actieve processen gaat zich in het virtueel geheugen
bevinden => bij 1 verwijzing naar het geheugen kan dan een dubbele paginafout optreden: 1
voor het binnenhalen van de nodige gegevens uit de paginatabel en 1 voor het binnenhalen
van de procespagina
De meeste apparaten voor secundaire opslag vereisen echter een grotere paginagrootte voor een meer
efficiënte blokoverdracht van gegevens (daarvoor dienen ze, om grote hoeveelheden aaneengesloten
data te verwerken)
Nog iets om mee rekening te houden is de invloed die de paginagrootte heeft mbt paginafouten:
paginagrootte klein => weinig paginafouten want er kunnen veel pagina's worden ingeladen in
het hoofdgeheugen. Beginsel van lokaliteit: na verloop van tijd bevinden zich in het geheugen
alle gedeelten van het programma in de buurt van frequente verwijzingen
als de grootte toeneemt, bevat elke afzonderlijke pagina locaties die zich verder an een recente
verwijzing bevinden => invloed beginsel lokaloteit neemt af en dan stijgt de foutfrequentie
naarmate de pagina's nog groter worden zullen ze groot genoeg worden om ganse processen te
bevatten waardoor er geen paginafouten meer optreden
De foutfrequentie is ook afhankelijk van het aantal frames die worden toegewezen aan een proces.
Naarmate het aantal toegewezen frames stijgt, daalt het aantal paginafouten
Het ontwerp van de paginagrootte hangt ook samen met de grootte van het fysieke hoofdgeheugen en
van het programma. Naarmate het geheugen groter wordt, groeit ook de adresruimte die door
toepassingen kan worden gebruikt.
De invloed van het beginsel van lokaliteit - - op moderne programmeertechnieken:
OO-programmeren: verwijzingen worden op korte tijd sterk verspreid over een groot aantal
objecten
multithreading: abrupte veranderingen in de instructiestroom en tot verspreide
geheugenverwijzingen
Probleem: als lokaliteit afneemt, dan neemt het aantal hits in de TLB ook af en vormt het opzoeken in
de TLB een bottleneck
Hoe dit oplossen?
grotere TLB kan maar zal minder wsl zijn
grotere pagina's => iedere TLB ingang verwijst naar een groter stuk geheugen (maar het
vergroten van de grootte kan leiden tot een vermindering aan prestaties)
Er is geëxperimenteerd geweest met meerdere paginagrootten waardoor er een flexibiliteit ontstaat die
toelaat de TLB efficiënt te gebruiken.
Segmenteren
Gevolgen voor het virtueel geheugen
vereenvoudigt het werken met groeiende gegevensstructuren want OS wijst gegevensstructuur
toe aan segment dat kan groeien en krimpen <-> geen segmentatie => programmeur moet
inschatten hoeveel plaats hij gaat nodig hebben voor zijn gegevensstructuur
moet een segment uitgebreid worden en is er daarvoor onvoldoende ruimte, dan kan het
verplaatst worden naar een deel van het geheugen waar er wel genoeg ruimte is of wordt het
weggeswapt als er geen blokken zijn die groot genoeg zijn
programma's kunnen onafhankelijk van elkaar worden gecompileerd
1 segment kan door meerdere processen gedeeld worden (tabel apart in een segment plaatsen
zodat meerdere processen het kunnen gebruiken)
de programmeur kan rechten toekennen aan segmenten => bescherming van de gegevens
Organisatie
elk proces heeft een eigen segmenttabel
Aangezien niet alle segmenten moeten worden ingeladen in het hoofdgeheugen bevat elke
segmenttabelingang (STE) naast het beginadres van het overeenkomende segment in het
hoofdgeheugen + lengte van het segment ook nog een p-bit en een m-bit + nog eventuele andere
besturingsbits.
basismechanisme voor lezen van een woord uit het geheugen:
vertalen van een virtueel adres(segmentnummer en offset) naar een reëel adres mbv de segmenttabel
Een register bevat het beginadres van de segmenttabel, segmentnummer in virtueel adres dient als
index voor de juist STE in de tabel. De STE geeft dan weer aan wat het basisadres is van het segment
in het hoofdgeheugen. Dat basisadres + offset = reëel adres.
Gecombineerd pagineren en segmenteren
Pagineren is transparant voor de programmeur en elimineert externe fragmentatie en zorgt daarmee
voor een efficiënt gebruik van het hoofdgeheugen. Segmentatie is zichtbaar voor de gebruiker en heeft
de mogelijkheid van werken met groeiende gegevensstructuren , modulariteit en de ondersteuning van
delen en bescherming. Elk segment wordt opgedeeld in een pagina’s van vaste grootte.
Bescherming en delen
Bescherming: elke STE: een lengte en basisadres => een programma kan geen toegang krijgen buiten
de grenzen van een segment
Deling: er kan naar een segment verwezen worden in de segmenttabellen van meerdere processen
Dit kan ook in een pagineringssysteem maar dan is het onzichtbaar voor de programmeur.
Besturingssysteemsoftware
het ontwerp van het geheugenbeheer van een OS is afhankelijk van 3 fundamentele keuzes:
1. gebruik van virtueel geheugen?
2. pagineren, segmenteren of beide?
3. kiezen van algoritmes die worden toegepast voor allerlei aspecten van het geheugenbeheer
Ophaalstrategie
vraag
herpagineren
Beheer residente set
grootte residente set
vast
variabel
vervangingsbereik
globaal
lokaal
Plaatsingsstrategie
Opschoonstrategie
vraag
vooral opschonen
Vervangingsstrategie
optimaal
Least recently used (LRU)
First in first out
Klok
Paginabuffering
Beheer van procesbelasting
multiprogrammeringsgraad
Strategie bij ophalen (fetch policy )
Deze strategie bepaalt wanneer een pagina moet worden overgebracht naar het hoofdgeheugen. Twee
mogelijkheden:
1. vraagpaginering (demand paging): een pagina wordt alleen maar overgebracht naar het
hoofdgeheugen bij een verwijzing naar een locatie binnen de pagina (bij de start van een
nieuw proces => veel paginafouten want de pagina's waarnaar verwezen wordt zitten nog niet
in het geheugen => paginafout; beginsel van lokaliteit stelt dat: naarmate meer en meer
pagina's worden ingeladen, de meest toekomstige verwijzingen verwijzingen zullen zijn naar
pagina's die nog maar recent zijn gebruikt geweest => aantal paginafouten daalt mettertijd)
2. prepaginering(prepaging): naast de pagina waarnaar verwezen wordt, worden ook nog andere
pagin's ingeladen => efficiënter gebruik maken van de harde schijf want nu worden in 1 keer
meerdere blokken gelezen ipv telkens te moeten zoeken en lezen (nu maar 1 keer zoektijd en
rotatietijd !!). Dit is op het gebied van aantal paginafouten uiteraard pas interessant als de
pagina's die worden ingeladen ook gebruikt worden
!!!!!!!!Wordt een proces uit het geheugen geswapt ('Opgeschort'), dan worden alle pagina's van de
residente van dat proces verwijderd. Wordt het proces opnieuw hervat, dan worden de pagina's die
zich van dat proces in het geheugen bevonden terug ingeladen.!!!!!!!!!!!
Strategie bij plaatsing
Deze strategie bepaalt waar een stuk van het proces terechtkomt in het geheugen. best-fit, first-fit,...
Belangrijk bij segmentering. Bij zuiver pagineren of een combinatie van segmentering en paginering
maakt deze strategie niets uit omdat de hardware voor de adresvertaling en de hardware voor
geheugentoegang even efficiënt kunnen werken voor elke pagina/framecombinatie
Strategie bij vervanging
Welke pagina moet worden vervangen uit de verzameling pagina's doe voor vervanging in aanmerking
komen wanneer alle frames in het hoofdgeheugen bezet zijn en er moet een nieuwe pagina worden
binnengehaald om te reageren op een paginafout.
Iedere aanpak heeft als doel dat de pagina die verwijderd wordt, de pagina is waarbij de kans dat er in
de nabije toekomst naar zal worden gerefereerd het kleinst is.
Naarmate een strategie uitgebreider en geavanceerder wordt, stijgt de hard-en softwareoverhead.
Framevergrendeling
Wanneer een frame vergrendeld is (grendelbit staat op 1 in de frame- of de paginatabel) => pagina kan
niet worden verwijderd in het hoofdgeheugen om te worden vervangen
Elementaire algoritmen
1. Optimaal: vervangt de pagina waarnaar het verst in de toekomst gerefereerd zal worden. Dit is
echter puur theoretisch omdat dit van het OS vereist dat het op de hoogte is van alle
toekomstige referenties
2. Least recently used (LRU): vervang de pagina waarnaar het minst recent is gerefereerd:
volgens beginsel van lokaliteit is dit de pagina met de kleinste kans om in de toekomst naar
gerefereerd te worden
3. FIFO: pagina's worden om beurten verwijderd (round robin) => de pagina die het langst in het
geheugen is wordt vervangen. Dit is nadelig want het zou kunnen zijn dat die in de nabije
toekomst weer nodig is => paginafout. Maar, het voordeel is dat dit gemakkelijk te
implementeren is.
4. Klok: aan elk frame wordt een extra bit toegevoegd: de u(se)-bit. Wanneer een pagina voor
het eerst in het geheugen wordt geladen, dan wordt de pointer naar het volgende frame gezet.
Als naar de pagina verwezen wordt, dan wordt de use bit op 1 gezet. Wanneer een pagina
vervangen moet worden, dan wordt het eerste frame dat tegengekomen wordt met een use bit
op 0 vervangen. Tijdens het zoeken voor vervanging wordt elke use bit die op 1 staat, op 0
gezet (zie fig 8-15)
Het verschil met FIFO is dat sommige frames (met u-bit==1) worden overgeslagen en dat het niet
altijd de oudste pagina moet zijn die vervangen wordt.
Men heeft gevonden dat, naarmate er meer frames worden toegewezen aan een proces, het verschil in
paginafouten kleiner en kleiner wordt tussen de verschillende strategieën => kan het lonen om te
opteren voor een simpele strategie omdat deze minder tijd in beslag neemt om uit te voeren.
Het klokalgoritme kan krachtiger worden gemaakt wanneer er rekening wordt gehouden met een
tweede bit naast de u-bit: de m-bit => 4 categorieën:
1. geen recente toegang, ongewijzigd (u:0;m:0)
2. recente toegang, ongewijzigd (u:1;m:0)
3. geen recente toegang, gewijzigd (u:0;m:1)
4. recente toegang, gewijzigd (u:1;m:1)
Het klokalgoritme werkt dan zo:
1. zoek naar frames waarbij u==0 en m==0; het eerste frame dat hieraan voldoet wordt
vervangen;
2. mislukt dat, dan wordt het eerste frame met u==0 en m==1 vervangen;
3. mislukt ook dat, dan gaan we nog eens door de frames want nu zijn alle u-bits die
daarvoor 1 waren 0 geworden en is er dus zeker 1 frame dat voldoet aan u==0;m==0 OF
u==0;m==1
Waarom u==0 en m==1 als tweede keuze: omdat dit frame niet recent is gebruikt en
dus is de kans
dat het binnenkort opnieuw gaat moeten gebruikt worden klein. Het f rame moet wel
weggeschreven worden voordat het wordt vervangen maar dat weegt op tegen het feit dat het mss
niet nodig is in de toekomst.
Paginabuffering
LRU en klok zijn superieur aan FIFO MAAR complexer en meer overhead
de kosten van vervanging van een gewijzigde pagina > die van een ongewijzigde pagina
Paginabuffering: Vervangen pagina gaat niet verloren maar wordt toegevoegd aan
volgende lijsten:
één van
Lijst van vrije pagina’s als de pagina niet gewijzigd is
Lijst van gewijzigde pagina’s (moeten weggeschreven worden naar secundair geheugen)
de pagina wordt niet verwijderd uit het hoofdgeheugen maar de PTE wordt verwijderd uit de
paginatabel en in de juiste lijst (vrije/gewijzigde) geplaatst.
VOORDELEN paginabuffering:
het kost weinig om de pagina terug in te laden in de residente set, gewoon de PTE uit de lijst
halen en in de paginatabel zetten
gewijzigde pagina's worden weggeschreven in clusters, niet 1 per 1, dat vermindert het aantal
I/Obewerkingen en daarmee ook de schijftoegangstijd
Paginabuffering werkt dan als een soort van cache voor pagina's
Beheer van de residente set
Grootte van de residente set
vaste toewijzing(fixed allocation): een proces krijgt een vast aantal pagina's waarbinnen het
moet worden uitgevoerd; dat aantal wordt bepaald bij de eerste keer dat het proces geladen
wordt. Wanneer tijdens de verwerking een paginafout optreedt, dan moet een procespagina
vervangen worden door een nieuw aangevraagde pagina
variabele toewijzing(variable allocation): het aantal frames dat is toegewezen aan een proces
kan variëren gedurende de levensloop van het proces. Een proces dat veel paginafouten
genereert geeft aan dat het beginsel van lokaliteit slechts in beperkte mate geldt voor dat
proces. Dan kan het aantal toegewezen frames aangepast(verhoogd) worden. Omgekeerd kan
ook, als er zeer weinig paginafouten gegenereerd worden, dan kunnen er gerust minder frames
worden toegewezen. Variabele toewijzing hangt samen met het concept 'Vervangingsbereik'
Vervangingsbereik
twee methodes die allebei worden geactiveerd wanneer er geen vrije frames zijn en er is een
paginafout
Lokaal: bij het vervangen wordt een pagina uit de residente set gekozen van het proces
Globaal: alle onvergrendelde pagina's kunnen vervangen worden, van wel proces ze ook zijn
Vervangingsbereik hangt samen met grootte residente set:
lokale vervanging
vaste toewijzing
variabele toewijzing
globale vervanging
- het aantal aan een proces
toegewezen frames ligt vast
- de te vervangen pagina wordt
gekozen uit de frames die zijn
toegewezen aan het proces
gaat niet: om de grootte van de
residente set gelijk te houden moet
een pagina van de residente set
vervangen worden door een andere
pagina van de residente set
- het aantal toegewezen frames kan
wijzigen voor het behoud van de
werkset (working set) van het
proces
- de te vervangen pagina wordt
gekozen uit de frames die zijn
toegewezen aan het proces
- de te vervangen pagina's worden
gekozen uit alle beschikbare (nietvergrendelde) frames in het
hoofdgeheugen => de grootte van
de residente set kan variëren
Vaste toewijzing met lokaal bereik
proces wordt uitgevoerd in hoofdgeheugen met vast aantal pagina's
paginafout => welke pagina vd residente set gaat vervangen worden?
van tevoren moet worden beslist hoeveel ruimte wordt toegewezen aan een proces; nadelen:
als dit te weinig is: paginafouten
te veel: er kunnen te weinig processen ingeladen worden in het hoofdgeheugen => er
wordt veel tijd besteed aan het swappen van processen
Variabele toewijzing met globaal bereik
gemakkelijkste vorm om te implementeren
paginafout => vrij frame toevoegen aan de frames die zijn toegewezen aan het proces en de
pagina daaraan toewijzen
zijn er geen vrije frames meer, dan wordt een pagina vervangen van om het even welk proces.
De moeilijkheid is deze keuze maken. Dit kan verholpen worden door gebruikt te maken van
paginabuffering omdat een pagina opnieuw kan worden gebruikt als die nog niet is
weggeschreven naar de harde schijf
Variabele toewijzing met lokaal bereik
robeert de problemen die ontstaan door het werken met globaal bereik te omzeilen:
wordt een nieuw proces in het hoofdgeheugen geladen, wijs daar dan een bepaald aantal
frames aan toe en gebruik prepaginering of vraagpaginering voor het vullen van de rest van de
toewijzing
paginafout => selecteer de te vervangen pagina uit de residente set van het proces dat de fout
heeft veroorzaakt
evalueer de toewijzing aan het proces zo nu en dan en verhoog of verlaag het aantal
toegewezen frames indien nodig
een veelbesproken methode: de werksetbenadering
werkset = een verzameling pagina's van een proces waarnaar verwezen is binnen een bepaald
tijdsvenster => als tijdsvenster groter wordt, dan wordt de werkset groter
De working set hangt nauw samen met lokaliteit: door dat beginsel gebruikt het proces een stabiele set
aan pagina's waarvan de inhoud van de werkset slechts minimaal verandert, volgende
overgansperioden wijzen op een verandering naar een nieuwe lokaliteit.
Tijdens een overgangsfase blijven een aantal pagina's uit de oude lokaliteit binnen het venster wat leidt
tot een forse toename van de grootte van de werkset bij verwijzingen naar nieuwe pagina's. Verschuift
het venster over deze paginaverwijzingen, dan neemt de werksetgrootte af totdat de werkset uitsluitend
pagina's bevat die behoren tot de nieuwe lokaliteit
Werkset kan worden gebruikt als leidraad bij een strategie voor de grootte van de residente set:
1. controleer de grootte van de werkset van elk proces
2. verwijder regelmatig pagina's uit de residente set van een proces die niet voorkomen in de
residente set van een proces (vergelijkbaar met LRU)
3. een proces mag alleen worden uitgevoerd als zijn werkset zich in het hoofdgeheugen bevindt
= als zijn residente set zijn werkset bevat => minder initiële paginafouten
Beperkingen van de werksetbenadering:
de toekomst kan niet worden voorspeld op basis van het verleden; zowel de grootte als de
samenstelling van de werkset zullen na verloop van tijd veranderen
het nauwkeurig meten van de werkset van ieder proces is onpraktisch want dit vereist een
timestamp voor iedere paginaverwijzing van elk proces = nogal veel
optimale waarde van Δ is onbekend en zal wisselen
desalniettemin is de gedachte goed en daarom zijn er een aantal OS'en die het trachten te
implementeren
In plaats van de werksetgrootte rechtstreeks te bewaken kunnen er vergelijkbare resultaten gehaald
worden door de frequentie van paginafouten te bewaken omdat, als de grootte van de residente set
stijgt, dan daalt het aantal paginafouten. De werksetgrootte is een punt op een kromme (zie p404).
=> Ligt de foutfrequentie onder een bepaald minimum, dan is het beter voor het systeem om een
kleinere residente set toe te wijzen aan een proces
=> Ligt de foutfrequentie boven een bepaald maximum, dan is het beter dat er een grotere residente set
wordt toegewezen aan het proces
Een algoritme die deze benadering volgt is pagina foutfrequentie. Dit vereist dat een use-bit
verbonden is aan elke pagina in het geheugen. Bij toegang tot de pagina wordt die ingesteld op 1. Bij
paginafout: registratie van de virtuele tijd sinds de laatste paginafout voor dat proces
Er wordt een drempel F gedefinieerd. Is de tijd sinds de laatste paginafout < F => er is een fout
opgetreden, sneller dan verwacht werd => er wordt een pagina toegevoegd aan de residente set van het
proces; is die tijd > F, dan worden alle pagina's met een use-bit die gelijk is aan 0 verwijderd =>
residente set wordt kleiner en tegelijkertijd worden de use-bits van de resterende pagina's op 0 gezet.
Deze strategie kan verfijnd worden door gebruik te maken van een minimum- en maximumdrempel
om respectievelijk het verkleinen en het vergroten van de residente set te activeren
De tijd tussen paginafouten is omgekeerd evenredig met de foutfrequentie. PFF heeft één groot nadeel:
presteert niet goed tijdens overgangsfasen waarin een verschuiving plaatsvindt naar een nieuwe
lokaliteit => veel paginafouten
Benadering die probeert het fenomeen
van overgangen tussen lokaliteiten op te lossen en die een relatief lage overhead heeft =>
Variable-interval Sampled Working Set
Op basis van steekproef-tijdsinterval grootte van residente set aanpassen
Gedurende tijdsinterval: pagina’s aan werkset toevoegen waarvoor paginafout optreedt
-> Use bit op 1 bij verwijzing naar pagina tijdens tijdsinterval
Op einde van tijdsinterval:
alle pagina’s met use bit op 0 uit werkset verwijderen
3 parameters
1. M: minimumduur
2. L: maximumduur
3. Q: aantal paginafouten dat mag optreden
4.
t >= L : schort proces op en controleer use bits
t < L en Q paginafouten bereikt:
t < M: wacht tot M, schort proces op en controleer use bits
t >= M : schort proces op en controleer use bits
Opschoon strategie
een opschoonstrategie bepaalt wanneer een gewijzigde pagina moet worden weggeschreven naar het
secundaire geheugen
Twee mogelijkheden:
vraagopschoning: een pagina wordt alleen weggeschreven wanneer die geselecteerd is voor
vervanging
precleaning: gewijzigde pagina's worden weggeschreven voordat hun frames nodig zijn =>
pagina's kunnen in batches worden weggeschreven
Nadelen:
vraagopschoning: het schrijven van een vervuilde pagina moet gekoppeld zijn aan het inlezen
van een nieuwe pagina. Het processorgebruik kan afnemen omdat het proces dat de paginafout
veroorzaakte moet wachten op twee paginaoverdrachten.
precleaning: de overdrachtscapaciteit van het secundair geheugen is beperkt en mag niet
worden verspild aan onnodig wegschrijven en het wegschrijven van een pagina die toch in het
hoofdgeheugen blijft en nog eens gewijzigd wordt, dat is een onnodige schrijfbewerking
geweest
p407
een betere benadering is paginabuffering: schoon alleen pagina's op die kunnen worden vervangen en
koppel de bewerkingen voor het opschonen en vervangen los. Pagina's worden in twee lijsten
geplaatst: (on)gewijzigd. De pagina's in de gewijzigde lijst worden periodiek in batches
weggeschreven. Een pagina in de lijst van de ongewijzigde pagina's wordt opnieuw gebruikt wanneer
ernaar gerefereerd wordt en gaat verloren wanneer zijn frame aan een andere pagina wordt
toegewezen.
Toezicht op de procesbelasting
dit heeft betrekking op het aantal processen dat resident is in het hoofdgeheugen, het zgn. niveau van
multiprogrammering
De strategie voor het beheer van procesbelasting is belangrijk voor de efficiëntie van het
geheugenbeheer. Zijn er te weinig processen in het geheugen => de kans is groot dat deze processen
allemaal geblokkeerd zijn en dat er veel tijd wordt gespendeerd aan swapping. Zijn er te veel
processen, dan is de omvang van de residente set van de processen te klein => veel paginafouten =>
trashing
Niveau van multiprogrammering
Naarmate er meer processen worden ingeladen, hoe kleiner wordt de kans dat daar
een geblokkeerd proces bij is (dus dat alle processen geblokkeerd zijn) waardoor het
processorgebruik stijgt. Echter, vanaf een bepaald punt zijn er te veel processen wat
ertoe leidt dat de gemiddelde grootte van de residente set te klein wordt => veel
paginafouten => er moeten veel pagina's worden ingeladen uit virtueel geheugen =>
weinig echt processorgebruik
Er is een algoritme dat dit probleem oplost: PFF: dit beheert impliciet de
procesbelasting; alleen processen met een voldoende grote werkset mogen worden
uitgevoerd
Opschorten van processen
wanneer het niveau van multiprogrammering worden verlaagd, dan moet één of
meer van de residente processen worden opgeschort (uit het hoofdgeheugen worden
weggeswapt); zes mogelijkheden:
1. proces met de laagste prioriteit
2. proces dat een paginafout veroorzaakt: er is een grotere kans dat de werkset
van dit proces niet resident is => de prestaties zullen het minst lijden onder het
opschorten van dit proces
3. Laatst geactiveerd proces: hierbij is de kans het grootst dat het geen residente
werkset heeft
4. Proces met de kleinste residente werkset: dit vereist de kleinste toekomstige
inspanning om het proces weer te laden. Het is echter nadelig voor
programma's met een beperkte lokaliteit
5. grootste proces => bij een overvol geheugen onstaan hierdoor de meeste vrije
frames waardoor extra inactiveringen in de nabije toekomst onwsl maakt
6. Proces met de grootste resterende uitvoeringstijd: dit neemt immers ook
plaats in aangezien het nog even kan duren vooraleer het uit het
hoofdgeheugen is verdwenen wanneer het volledig is uitgevoerd