Practicum vectoren en beweging
enkele ideeën voor een nog te maken hoofdstuk vectoren en beweging in Wiskunde D VWO5 juni 2009
dit practicum hoort bij de presentetatie Snelle_vectoren.ppt
bijgestelde versie 8 juni 2009
Aad Goddijn
1.
Een RAAKLIJN CONSTRUEREN bij de Limaçon van Blaise Pascal.
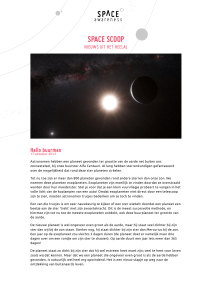
In deze figuur zie je punt Z1 en Z2 over de eenheidscirkel gaan. Ze startten beiden in (1, 0). Z2 gaat
steeds twee keer zo snel als Z1. Vat ze op als plaatsvectoren. Het punt P = Z1 + Z2 is geconstrueerd.
De baan van P is de zogenaamde Limaçon van Pascal.
hodograaf
van de limaçon
N
W
O
Z
a. Geef de posities van P in de figuur voor Z1 =(0, 1) en (0, -1).
b. De baan van P snijdt/raakt de assen een aantal keren, zes in totaal. Welke zes posities van Z1 horen
daar bij? (Tip van een leerling 6VWO: hoe snel draait lijn OP rond als Z rondgaat?)
c. Neem aan dat de hoeksnelheid van Z1 constant gelijk 1 is. Kies en teken een snelheidsvector voor
Z1, construeer van daaruit de snelheidsvectoren voor de bewegende punten Z2 en P.
Teken de raaklijn aan de limaçon in het punt P.
De hodograaf van de limaçon; verkenning van een hodograaf
d. Hoeveel punten zijn er met een zuiver verticale (horizontale) snelheid?
e. In welke punt is de snelheid maximaal? Is de snelheid ooit gelijk aan 0?
f. De limaçon zelf is symmetrisch om de x-as. Waarom?
De hodograaf van de limaçon is symmetrisch om de NZ -as. Waarom ?
g. Verken en schets de hodograaf van punt P!
Deze opgave illustreerde het gebruik van vectoren bij een raakprobleem.
De volgende opgave maakt iets meer gebruik van de hodograaf.
2.
De fameuze cycloïde
Een punt P op de buitenkant van een over de vloer (of lijn) rollend wiel (of cirkel) beschrijft een cycloïde. In de tekening: OX en boog PX zijn steeds even lang.
De beweging van P is de samenstelling van een voorwaartse en een draaiende beweging.
Kies voor de verkenning weer een vaste snelheid.
a. Construeer de raaklijn in P vanuit de
beide snelheidscomponenten van P
b. Toon aan dat de raaklijn steeds door de
top T van het wiel gaat.
c. Teken ook de hodograaf.
d. Vind en verklaar enkele eigenschappen
van de cycloïde vanuit de hodograaf.
hodograaf van de cycloide
N
Durf je de volgende redenering aan?
(Dwz.: verbeter of weerleg het argument)
W
O
e. Trek lijn PT en beschouw P als bewegen op deze lijn en T vast op deze lijn.
Let alleen op de rotatiecomponent en
onderbouw deze conclusie:
De snelheid van P op die lijn is half zo
groot als de snelheid van P ten opzichte
van het de cycloïde.
f. Toon met behulp van e aan dat 1 boog
van de cycloïde juist 4 cirkel diameters lang is.
2
Z
De snavel van de cycloïde
In een vierde klas groepje werd de cycloïde verkend, vanuit het afrollen van kartonnen wielen en
daarbij tekenen van de curve. De vraag was ook: “wat doet het bewegend punt precies als het beneden
is?” Er waren voorstanders voor elk van deze drie visies:
rakend
snavelend
stuiterend
Hier is een argument (?) dat gebruik maakt van de hodograaf
fragment
hodograaf
fragment cycloïde
V
l’
l
o
m’
m
W
Rechts twee punten V en W op de hodograaf. Het stuk hodograaf ertussen hoort bij de beweging in
de buurt van raakpunt R van de cycloïde aan de vloerlijn. l en m zijn de lijnen Vo en Wo.
De cycloïde bevindt zich tussen de lijnen l’ en m’ die evenwijdig zijn aan l en m.
Conclusie: snavelend! Want Al V en W naar o naderen, benadert de hoek tussen l en m de platte hoek.
g. Is het argument correct? Nee!
Waarom niet?
h. Bedenk dat twee andere lijnen l en m bij het fragment van de hodograaf, waarbij het argument wel
correct is.
3
3.
Elke trein rijdt altijd een beetje achteruit.
Het wiel van een rijdende trein. De cirkel van P is groter dan de rolcirkel. Daardoor blijft de trein in
het algemeen op de rails. De baan van P is een trochoïde.
a. Er zijn altijd punten die achteruit bewegen. Hoezo?
b. De snelheid van M kozen we voor het gemak zoals in het plaatje.
Dat kan misleidend zijn, maar als het dat niet is teken je nu makkelijk de raaklijn in P aan de
trochoïde.
c. Het lijkt of de baan van P de rails loodrecht doorsnijdt. Bewijs dat door een onderzoek naar de
snelheidsvector!
(Ruimte voor de hodograaf!)
Deze loodrechtheid kan ook heel anders worden aangetoond; in een volgend onderdeel
van dit practicum wordt andere apparatuur daarvoor klaargezet.
4
4.
Aardschollen schuiven
(ontleend aan de NLT-module Bewegende Aarde. Iets aangepast voor vandaag)
inleiding
Bewegingen van aardschollen worden beschreven met behulp van hun rotatiepolen.
In dit fragment leer je begrijpen waarom die
polen bestaan. We beginnen met een eenvoudig voorbeeld van een verplaatst vierkant.
In deze figuur zie je één vierkant dat van
positie ABCD naar positie A’B’C’D’ is verplaatst.
D’
A
D
A’
a. Maak een papieren vierkant dat precies
zo groot is als ABCD en knip het uit. Leg
het vierkant op positie ABCD.
C’
b. Als je een passerpunt (of scherp potloodpunt) op het losse vierkant zet, kun
B
C
je het nog gemakkelijk draaien. Probeer
dat uit.
B’
c. Het zal waarschijnlijk niet direct lukken
je vierkant ook passend op A’B’C’D’ te
draaien. Daarvoor moet je passerpunt namelijk precies op een bepaald plek gezet zijn. Probeer die
plek zo nauwkeurig mogelijk te vinden.
Nu heb je als het ware experimenteel laten zien dat er waarschijnlijk wel zo’n punt (noem het verder
P) bestaat. De volgende stappen geven antwoord op de vraag:
Hoe vind je dat punt EXACT en bestaat het echt altijd?
d. Waarom moet gelden |PA| = |PA’|? En wat zegt dat over de middelloodlijn van de punten A en A’?
e. Teken in de figuur ook de middelloodlijn van B en B’. Nu kun je de positie van P exact bepalen!
f. De middelloodlijn van de middens van DC en D’C’ gaat óók door P. Test en verklaar.
Rotatie vectorveld
g. Als je ABCD om de gevonden pool P begint te draaien naar A’B’C’D’, heeft elk punt van ABCD
een snelheidsvector. Schets genoeg punten en hun vectoren om een overzicht te krijgen.
Momentane draaiing
F
In deze figuur is een driehoek aan het bewegen. Je ziet de richtingen waarin D en E
bewegen en hun snelheden aangegeven
met de vectoren d en e.
h. Je kunt de situatie beschouwen alsof de
D
driehoek naar D’E’F’ wordt verplaatst,
d
maar dat de verplaatsingsafstanden nog
onzichtbaar klein zijn.
Toch kun je hier de rotatiepool Q bepalen met behulp van twee loodlijnen. Doe dat.
i. Nu kun je ook de bewegingsrichting van F construeren. Doen!
e
E
Blijkbaar is ook deze beweging die nog nauwelijks begonnen is op te vatten als een rotatie. Men
5
spreekt wel van een momentane draaiing en de momentane rotatiepool. Als de driehoek zich echt
geleidelijk verplaats is er op elk moment een rotatiepool, maar die rotatiepool is geen vast punt als
de beweging niet een doorlopende draaiing is.
j. Denk nu aan het algemeen oplossen van dit probleem. Duidelijk is dat d en e niet evenwijdig mogen zijn. Maar is dat voldoende beperking op de vectoren d en e?
5.
Twee draaiingen en hun verschil
Denk aan twee aardschollen waarvan we de bewegingen ten opzichte van een referentieobject (een
derde plaat C) weten. Wat we willen weten is de aard van de onderlinge beweging van A en B, die is
belangrijk voor ontstaan van aardbevingen en eventuele tsunami’s.
In de illustratie zijn de draaiingen
van de ene schol met rode pijltjes
weergeven (kleuren wel zichtbaar
in de ppt); de rotatiepool is punt A.
De groene pijltjes geven de
draaiing van de andere schol rond
rotatiepool B weer. De rotatiesnelheden verschillen, dat is aan de
pijltjes te zien. De pijltjes geven de
plaatselijke werkelijke snelheden
aan. (De gebruikte maat in de praktijk is graden per Megajaar)
De verschilsnelheden zijn aangegeven met zwarte pijltjes; in deze
zijn we dus geïnteresseerd. Ergens
op de lijn tussen A en B moet een
punt zijn waar de werkelijke grootte en richting van het groene pijltje gelijk is aan die van het rode aan elkaar gelijk zijn. Omdat in dit
geval de rotatie om B sneller is dan die om A, ligt dat punt dichter bij B dan bij A. Te zien is dat de
zwarte pijltjes een draaiing aangeven rond dat punt. Dat is de rotatiepool van plaat A ten opzichte van
plaat B. Deze pool en zijn hoeksnelheid zijn de kenmerken van het onderlinge gedrag van de platen.
a. In deze figuur zijn twee rotatiepolen C en D aangegeven. De rotaties zijn hier in dezelfde richting;
de hoeksnelheid van D is twee keer zo groot als die van C. Zoek het punt waar de werkelijke snelheden van de draaiingen van schol C en schol D aan elkaar gelijk zijn en waar dus de onderlinge
beweging zijn rotatiepool heeft.
C
D
Met wat goniometrie is in elke punt nu wel de onderlinge snelheid te bepalen.
De in de praktijk gebruikte data zijn van dit type: positie en rotaties snelheid. Er zijn computerprogramma’s voor de werkelijke berekeningen.
In dit practicum staat tot nu toe slechts een aanzet. Een werkelijk probleem is de bolvorm
van de aarde. Een suggestie daarbij op de volgende pagina. Pittig vectoren gebruik.
6
6.
Afrondend extradeel rotatiepolen (ter informatie, kort door de bocht):
In het platte vlak is zo’n pool er theoretisch soms niet; namelijk in het geval van translaties.
Op aarde is zo’n pool er altijd wel, de middelloodlijnen moeten namelijk vervangen worden door
grootcirkels en die snijden elkaar altijd.
De meetkunde op de aardbol kent het stuitende begrip evenwijdigheid niet. Staat dat het gebruik van
vectoren niet ernstig in de weg? Nee, maar de vectoren komen op een heel andere manier terug!
Men is vooral geinteresseerd in het onderlinge schuiven van schollen.
Je kunt daar kijken naar de assen van de draaiingen, maar ook naar de grootcirkels die loodrecht op
de assen staan; denk er aan als de evenaars van de poolassen. Bij twee draaiingen snijden die grootcirkels elkaar zeker. Bij het snijpunt heb je goed zicht op de onderlinge beweging: het zijn gewoon
snelheidsvectoren in het raakvlak aan het snijpunt die het verhaal vertellen.
Dat maakt het mogelijk de rotaties inderdaad op te vatten als vectoren in de richting van de poolassen!
ωA
A
B
ωB
mA
M
cA
vC
vA
P
vB
cB
Hier is P het snijpunt van de grootcirkels die bij de draaiingen om A en B horen. De vector mA heeft
dezelfde lengte als vA.
a.
b.
c.
d.
e.
Wat weet je van de richting van mA?
.........................
.........................
Geef (zo goed mogelijk) het punt aan waar de as van het draaiverschil van A en B zich bevindt.
Laat (informeel) zien dat als A en B niet te ver van elkaar liggen, het resultaat goed klopt met de
werkwijze hierboven in het platte vlak!
7
7.
De stelling van de vliegende staaf
De stelling:
Voor de snelheden van de eindpunten van vliegende staaf BC geldt:
de snelheidscomponenten van B en C in de richting van de staaf zijn altijd gelijk.
eerste bewijs: vlak meetkundig
Driehoek ABC draait om A. Bij hoekpunten B en C zijn de snelheidsvectoren vb en vc aangegeven.,
alsmede hun projecties op BC, vb’ en vc’, aangegeven.
H is de loodrechte projectie van A op BC.
a. We zijn puur geïnteresseerd in de lengteverhoudingen.
Bijvoorbeeld van vb en vc. Die is in de zijden van ABC uit te drukken.
b. Vind nog meer gelijkvormigheden en verhoudingen. En uiteindelijk dat |vb’| / |vc’| = 1.
tweede bewijs: analytisch met behulp van het inproduct
In dit gedeelte pakken het wat theoretischer aan. Het is helemaal de vraag of dat in het VWO-hoofdstuk nodig is, gezien het derde bewijs dat strakes volgt.
In het volgende zijn P en Q bewegende punten; tijdsafhankelijke plaatsvectoren.
We schrijven niet steeds (t) achter P, omdat we dat dan bij alle letters precies eender moeten doen.
Zinloos formalisme! Op plekken waar het functioneel is doen we het wél.
·
De snelheidsvector van bewegend punt P geven we aan met P , de fluxie van P . Je mag aan ‘afgeleide’ denken, maar ‘snelheid’ ligt meer voor de hand. Het ís een afgeleide, maar dan van een tijdsafhankelijke vector:
·
P = lim ΔP
------Δt → 0 Δt
a. Toon aan dat voor het inproduct van P en Q de volgende ‘product’ regel geldt:
·
·
d
( P, Q ) = ( P, Q ) + ( P, Q )
dt
Probeer het bewijs te voeren zonder in coördinaten af te dalen. Dat kan heel goed; je kunt namelijk
best Δ’s gebruiken bij vectoren zoals bij gewone variabelen.
Probeer het eerst ... Op de volgende bladzijde staat een nadere invulling.
8
Bij het bewijs van de productregel voor inproducten
We werken met differenties en quotienten. Zowel P als Q hangen van de tijd af.
We gebruiken de lineariteitseigenschappen van het inproduct. (Die zijn belangrijker dan de schoolboeken ons willen doen geloven ..)
Δ ( P, Q )
( P + ΔP, Q + ΔQ ) – ( P, Q )
------------------- = -----------------------------------------------------------------Δt
Δt
( P, Q + ΔQ ) – ( P, Q -)
P + ΔP, Q + ΔQ ) – ( P, Q + ΔQ )- + --------------------------------------------------= (-------------------------------------------------------------------------------Δt
Δt
ΔQ
ΔP
= ⎛ -------, Q + ΔQ⎞ + ⎛ P, --------⎞
⎝ Δt
⎠ ⎝ Δt ⎠
En nu de limietovergangen bekijken ..
b. Als BC de vliegende staaf is, dan is de lengte van BC constant. Vectorieel:
d
( B – C, B – C ) = 0
dt
Leidt hieruit af:
·
·
· ·
en
( B, B – C ) = ( C, B – C )
( B – C, B – C ) = 0
c. Hoe vertaal je dat naar de stelling van de vliegende staaf?
derde bewijs: met gezond verstand
d. De snelheden van B en C werken loodrecht op de staaf en in de richting van de staaf. Wat gebeurt
er met de afstand van B en C als de componenten van B en C in de staafrichting niet gelijk zijn?
8.
Toepassing op het spoorprobleem
Nogmaals de figuur van de rails.
Q is het contactpunt van de rolcirkel en de rails. Je kunt Q ook opvatten als punt van de rolcirkel. Dan
is |PQ| evident constant in staat Q op het moment van contact met de rails stil.
a. Hoe volgt nu dat de snelheidsvector van P loodrecht staat op PQ?
9
b. De redenering gaat ook op als P juist op rails-niveau is. Wat is de conclusie?
c. Je kunt in de gegeven situatie met aangegeven snelheidsvector ook makkelijk de rotatiecomponent
van de snelheid van P toevoegen en de snelheidsvector van P construeren. Zoals in 3b gedaan is.
Er is vast wel een betrekkelijk eenvoudig bewijs voor de bewering van de loodrechtheid!
9.
Toepassing in en examenopgave: VWO B1,2, 2 juni 2009
In dit kader staat de introductie van een opgave uit het VWO B1,2 examen, 2 juni 2009; tot juist voor
het moment waarop de auteurs de coördinaten gaan opvoeren.
In deze situatie is het punt R steeds weer zowel een punt van de cirkel als van PQ.
a. RP is (bijvoorbeeld in de situatie van het derde plaatje) onze vliegende staaf. R staat dan stil in het
raakpunt. Teken de pijl vanuit P die de richting van de snelheid aangeeft.
b. Op dat moment maakt de staaf RP een momentane draaiing om R.
Wat is de draaisnelheid om R?
Hoe kun je de grootte van de snelheid van P dus uitdrukken in de lengte |RP|
Op de volgende bladzijde wordt de examendoende leerling door de auteurs meegenomen in een coördinaten stelsel en wordt uiteindelijk hetzelfde reslutaat bereikt.
10
vervolg examen opgave
11
10. Terug- en vooruitblik
De onderwerpen in dit practicum vallen onder de rubriek kinematica: problemen over bewegende
vormen, waar geen kracht-beschouwing bij worden betrokken. De klassieke kinematica in moderne
vorm, bijvoorbeeld in het boek van Veldkamp*, hult zich in een stevige algebraisches jas van vectoren, matrices, in- en uitproducten. In dit practicum is ter introductie meer nadruk gelegd op de basisaspecten van vectoren, die coordinaatvrij hanteerbaar zijn.
Kinematica is een prachtig terrein waar analyse en meetkunde, al dan niet analytisch, samen werken.
Het volgende onderdeeel onderdeel van dit practicum is een voorstel m.b.t. de ellipsbeweging van
planeten rond de zon in een Wiskunde D-hoofdstuk.
11. Richard Feynman en de ellipsbaan van de planeten
Sinds Kepler weten we dat planeten zich om de zon bewegen in ellipsbanen. De zon staat in een van
de brandpunten van de ellips. Newton leverde daar als eerst een meetkundige bewijs van, waarin hij
laat zien hoe de ellipsbaan volgt uit de perkenwet van Kepler (de voerstraal zon-planeet beschrijft in
gelijke tijden gelijke oppervlakten) en de wet dat de aantrekkingskracht van de zon omgekeerd evenredig is met de afstand tot de zon. Opmerkelijk is dat het bewijs de ellipsvorm van de baan aantoont,
zonder precies aan te geven op welke moment de planeet op een specifieke plaats in de baan is.
Richard Feynman gaf in de beroemde Lost Lecture, die later is gereconstrueerd aan de hand van zijn
aantekeningen en een audio-opname) een kort bewijs, waarin effectief de hodograaf van dit practicum wordt gebruikt. Op de volgende bladzijde een kopie van de aantekeningen van Feynman voor
zijn lezing. Daar staat de essentie van het betoog wel in; in het midden staat een stukje baan van de
planeet links en de hodograaf rechts. In het laaste fragment staat de ellips met de constructie van de
raakrichting. De aanpak gebruikt alleen technieken die in het huidige VWO-B wis- en natuurkundeprogramma passen, maar is wel subtiel.
Michel Roelens besprak het bijhorende boekje in het tijdschrift Uitwiskeling en gaf er een fraaie presentatie over op NWD 2006. Aangehangen aan dit practicum: de handout van Michel Roelens.
Voorafgegaan door een eerdere verkenning van snelheidsdiagrammen in samenhang met banen, lijkt
het goed vertaalbaar naar een Wiskunde D-hoofdstuk voor VWO 6. Het lijkt de moeite waard die vertaling te maken, met gebruikmaking van wat in dit practicum is aangeduid.
Laat wie zin heeft en kans ziet mee te denken en iets uit te proberen, zich melden!
Tot slot een fragment uit Feynman’s nabeschouwing uit 1964.
It is not easy to use the geometrical method to discover things. It is very difficult, but the
elegance of the demonstrations after the discoveries are made is really very great.
The power of the analytic method is that it is much easier to discover things than to prove
things. But not in any degree of elegance. It's a lot of dirty paper, with x's and y's and crossed out cancellations and so on.
Einde!
Aad Goddijn
[email protected]
*
Veldkamp. Kinematica, Scheltema & Holkema, Amsterdam, 1970
12
13
14
De baan van de planeten rond de zon
volgens Newton en Feynman
Michel Roelens
([email protected])
Katholieke Hogeschool Limburg, Lerarenopleiding, Bachelor Secundair Onderwijs, Diepenbeek, België
Maria Boodschaplyceum, Brussel, België
Tijdschrift Uitwiskeling
Op 14 maart 1964 gaf de wereldberoemde natuurkundige en
Nobelprijswinnaar Richard Feynman (1918-1988) voor een publiek van
eerstejaarsstudenten een opmerkelijke lezing over ‘de beweging van de
planeten rond de zon’. In deze lezing toonde Feynman aan dat de
ellipsvorm van de baan van een planeet volgt uit de wetten van Newton
en de aard van de gravitatiekracht. Hierbij steunde hij enkel en alleen
op Euclidische meetkunde; in het bewijs komen dus geen afgeleiden
noch differentiaalvergelijkingen voor. Het gaat dus om een ‘elementair’
bewijs, wat echter niet wil zeggen dat de redenering eenvoudig is.
Terwijl de andere lezingen van Feynman uit dezelfde periode allemaal
meteen gepubliceerd werden (zie [1]), geraakte deze lezing in de
vergetelheid. Ongeveer dertig jaar later, na Feynmans dood, doken
enkele slordige schetsen op die de spreker ter voorbereiding van die
lezing had gemaakt, alsook een geluidsbandje. Op basis van dit
materiaal slaagde het echtpaar Goodstein erin om de lezing te
ontcijferen en gedetailleerd te reconstrueren. Dit gaf aanleiding tot het
overheerlijk boekje [2].
Het boek begint met een − beknopt maar schitterend geschreven − hoofdstukje over de geschiedenis van de
beschrijving van het zonnestelsel: van Aristoteles via Ptolemaios, Copernicus en Kepler tot Newton.
Kepler (begin 17de eeuw) leidde uit observatiegegevens af dat de baan van een planeet een ellips is met de zon
in één van de brandpunten (1ste wet van Kepler). Bovendien stelde hij vast dat de snelheid van een planeet
varieert afhankelijk van de afstand tot de zon (de 2de wet van Kepler of de ‘perkenwet’: de verbindingslijn van
de planeet met de zon beschrijft in gelijke tijdsintervallen gelijke oppervlakten) en dat er een mooi verband is
tussen de omloopstijd van een planeet en de afstand van die planeet tot de zon (3de wet van Kepler).
Newton ([3], eind 17de eeuw) toonde de logische samenhang aan van deze wetten van Kepler met zijn
gravitatietheorie (de gravitatiekracht die twee lichamen op elkaar uitoefenen is omgekeerd evenredig met het
kwadraat van de afstand tussen beide lichamen) en de wetten van de dynamica (namelijk: 1. zonder dat er een
kracht inwerkt, blijft een lichaam rechtlijnig met een vaste snelheid bewegen; 2. kracht is massa maal
versnelling; 3. actie is gelijk aan reactie). Hoewel Newton zelf de differentiaalrekening had uitgevonden,
steunde hij hierbij niet op deze ‘nieuwe’ rekentechnieken. Feynmans bewijs van de perkenwet komt overeen
met dat van Newton, maar om te bewijzen dat de planeet een ellipsbaan volgt, bedacht Feynman een andere
redenering dan Newton.1 Hieronder willen we Feynmans redenering samenvatten.
Verschillende manieren om een ellips te bepalen
Je kunt een ellips definiëren als vlakke doorsnede van een kegel of als de verzameling (meetkundige plaats)
van de punten P waarvan de som van de afstanden tot twee vaste (brand)punten F en F’ constant is. Maar het
bewijs van Feynman steunt op een derde manier om een ellips te bepalen. Deze manier komt neer op het
‘vouwen’ van een ellips.
1
Newton besteedde vooral aandacht aan de omgekeerde implicatie: als de planetenbanen ellipsen zijn, dan moet de
gravitatiekracht omgekeerd evenredig zijn met het kwadraat van de afstand.
De baan van de planeten rond de zon
Michel Roelens
Nationale WiskundeDagen 2006
1
Teken op een blad papier een cirkel met middelpunt F’ en teken binnen de cirkel een punt F. Vouw nu
het blad zo dat je een punt G van de cirkel met het punt F laat samenvallen. Leg het blad weer open en
herhaal de vouwoperatie nog (minstens) een twintigtal keren, telkens met een ander punt G van de
cirkel. Je krijgt een ellips te zien, waar alle vouwlijnen aan raken.
Dit ‘vouwen’ kan eenvoudig gesimuleerd worden in Cabri. Teken een cirkel c met middelpunt F’, teken een
punt F binnen de cirkel en neem een punt G op de cirkel c. Als je G op F wilt vouwen, is de vouwlijn de
middelloodlijn van [FG]. Voer nu een animatie uit waarbij die vouwlijn een spoor maakt en waarbij G op de
cirkel c rondloopt.
In plaats van die animatie kun je aan Cabri ook de meetkundige plaats van de vouwlijn laten tekenen (bepaald
door de beweging van het punt G op de cirkel). Dan verschijnt de ‘omhullende’ van al die raaklijnen op het
scherm en dat wordt de ellips. Op die figuur zien we dat het raakpunt van de vouwlijn aan de ellips niet het
midden van [FG] is, maar wel het snijpunt van deze vouwlijn met F’G.
Nu zie je dat |F’P| + |PF| = |F’G| en dit is de (vaste) straal van de cirkel c. Het punt P beweegt dus inderdaad
op een ellips. Bovendien is de vouwlijn inderdaad de raaklijn in P aan deze ellips. Neem immers een ander
punt Q op deze rechte. Dan geldt: |F’Q| + |QF| = |F’Q| + |QG| > |F’G|, zodat dit punt Q buiten de ellips ligt.
De baan van de planeten rond de zon
Michel Roelens
Nationale WiskundeDagen 2006
2
Bewijs van de perkenwet
Een planeet beweegt rond de zon S. We veronderstellen dat de
zon stil staat en we verwaarlozen de interactie met andere
hemellichamen. We maken een ‘discrete’ benadering, dit wil
zeggen dat we de beweging opdelen in korte gelijke tijdsintervallen en doen alsof de planeet in elk van die tijdsintervallen
rechtlijnig beweegt. De planeet gaat in zo’n tijdsinterval van A
naar B (zie figuur hiernaast, uit Newtons Principia mathematica
philosophiae naturalis van 1687). Als we nu de duur van het
tijdsinterval als tijdseenheid nemen, kunnen we AB bekijken
als de snelheidsvector van de planeet in punt A. Als er geen
kracht in het spel was, zou de planeet in het volgende tijdsinterval van B naar c gaan (eerste wet van Newton). Maar de
zon trekt de planeet aan met een kracht gericht van B naar S. De
tweede wet van Newton zegt dat de kracht evenredig is met de
versnelling, d.w.z. met de snelheidsverandering. Bij de
snelheidsvector AB wordt dus een vector BV bijgeteld richting zon (zie figuur), zodat de planeet niet naar c
maar naar C gaat (immers: Bc + BV = BC ).
Om nu de perkenwet (2de wet van Kepler) aan te tonen, moeten we gewoon bewijzen dat de driehoeken SAB
en SBC dezelfde oppervlakte hebben. Maar dit is duidelijk het geval: ze hebben dezelfde basis [SB] en de
hoogtes zijn gelijk (A en c en dus ook A en C liggen duidelijk even ver van de rechte SB).
Bewijs dat de baan ellipsvormig is
Zet je schrap, lezer, want dit is toch een tikkeltje ingewikkelder.
Feynman maakt hier opnieuw een discrete benadering, maar deze keer deelt hij de beweging niet op in stukjes
met gelijke tijdsintervallen, maar wel met gelijke hoekjes met de zon als hoekpunt. De planeet gaat dus van J
naar K, van K naar L enz. en de hoekjes in S zijn gelijk.
Nu zegt de tweede wet van Newton dat de kracht evenredig is met de
∆v
versnelling, dus in onze discrete benadering met
(de snelheidstoename
∆t
per tijdseenheid). De perkenwet zegt dat ∆t evenredig is met de oppervlakte
van het driehoekje SJK, respectievelijk SKL, enz. Anderzijds is de
gravitatiekracht omgekeerd evenredig met het kwadraat van de afstand tot
de zon. Dit geeft
1
∆v
∆v
~F~
~
.
2
∆t
opp
afstand
Als je nu kunt aantonen dat de oppervlakte van zo’n driehoekje evenredig is met het kwadraat van de afstand
tot de zon (en we laten je dit zelf doen; vergeet niet dat de hoekjes in S gelijk zijn…), dan volgt hieruit dat ∆v
constant is!
In een volgende stap tekent Feynman een hodograaf: de verschillende snelheidsvectoren in de punten J, K,
L … laat hij in een zelfde punt O aangrijpen. De snelheidsvector Oj is evenwijdig met JK, Ok is evenwijdig
met KL, enz. Omdat we gelijke hoekjes genomen hebben en geen gelijke tijdsintervallen, kunnen we niet
zeggen dat de lengten van deze vectoren evenredig zijn met de lengten |JK|, |KL|, enz. bij de baan. De
eindpunten van de hodograaf bepalen een veelhoek jklm…. De zijden van deze veelhoek zijn de snelheidsverr
r
anderingen (bv. jk = Ok − Oj = vK − vJ ). Omdat ∆v constant is (dat is hierboven aangetoond) zijn de zijden
De baan van de planeten rond de zon
Michel Roelens
Nationale WiskundeDagen 2006
3
van deze veelhoek allemaal even lang. En omdat de hoeken in S bij de baan gelijk genomen waren en kj // KS,
kl // LS, … (de snelheidsveranderingen wijzen naar zon) zijn de hoeken van deze veelhoek ook allemaal even
groot. De veelhoek jklm… is dus een regelmatige veelhoek! Merk op dat het punt O niet het middelpunt C is
van deze regelmatige veelhoek. In dit punt C vinden we dezelfde hoekjes terug als in S op de linkse figuur (de
middelpuntshoeken van een regelmatige veelhoek zijn gelijk aan de buitenhoeken).
Nu maakt Feynman de gelijke hoekjes in S kleiner en kleiner zodat de baan JKLM… van de planeet een
kromme wordt (de kandidaat-ellips) en de regelmatige veelhoek jklm… een cirkel (figuur hieronder in het
midden). Als de planeet P rond de zon S draait, blijft de raaklijn aan de baan in P op elk moment evenwijdig
met Op vermits Op de snelheidsvector voorstelt. Bovendien is de middelpuntshoek OCˆ P gelijk aan de hoek
die SP maakt met een horizontale as door S (op de figuur hieronder links). Vervolgens draait Feynman de
hodograaf over 90° in wijzerzin (figuur hieronder rechts). De raaklijn aan de kromme in P staat nu op elk
moment loodrecht op Op.
Maar de gedraaide hodograaf is dezelfde figuur als de allereerste van deze bespreking (C en O heetten toen F’
en F)! De middelloodlijn van [Op] is die vouwlijn; voor elke positie van p op de cirkel krijg je een raaklijn aan
een ellips met C en O als brandpunten! Bijgevolg moet ook de baan van P op de linkse figuur een ellips zijn,
want met de richting van de snelheid op elk moment (of liever: voor elke waarde van de hoek in S) ligt de
vorm van de baan vast!
Deze laatste stap is volgens mij de zwakste schakel in de redenering van Feynman. In feite komt deze stap
neer op de uniciteit van de oplossing van een differentiaalvergelijking als de beginpositie gegeven is. Ik vraag
mij af of deze stap even ‘elementair’ is als de andere stappen van de redenering.
Bibliografie
[1] R.P. Feynman, R.B. Leighton, M. Sands, The Feynman lectures on fysics, 3 volumes, Addison-Wesley (Reading),
1963-1965.
[2] D.L. Goodstein, J.R. Goodstein, Feynman’s lost lecture. The motion of the planets around the sun, V,intage
(London), 1997, besproken in Uitwiskeling 19/3 (mei 2003). De bespreking in Uitwiskeling vormde de basis voor
deze tekst.
[3] I. S. Newton, Philosophiae naturalis principia mathematica, Londen, 1686.
[4] http://www.lostlecture.host.sk/LostLecture.htm (webstek van de Slovaakse uitgave, met applets!)
De baan van de planeten rond de zon
Michel Roelens
Nationale WiskundeDagen 2006
4