Schrijvers:
Profiel:
Vak:
School:
Klas:
Plaats:
Begeleider:
Schooljaar:
Datum:
R. N. Frentrop
L. D. van Wijngaarden
Natuur en Gezondheid & Natuur en Techniek
Natuurkunde
Lyceum aan Zee
LV6C
Den Helder
S.G.H. Berendsen
2007-2008
maandag 7 april 2008
Inhoud
INHOUD ........................................................................................................................................... 2
INLEIDING ........................................................................................................................................ 3
1. HOE KUN JE DE POSITIE VAN DE ZON BEPALEN?........................................................................ 5
2. WELKE EISEN STELLEN WIJ AAN ONZE ZONNEVOLGER? ............................................................ 6
3. WELKE MOTOR IS GESCHIKT VOOR DE ZONNEVOLGER? ........................................................... 7
ELEKTROMOTOR ............................................................................................................................... 7
SERVOMOTOR .................................................................................................................................. 7
STAPPENMOTOR............................................................................................................................... 7
4. DE ELEKTRONICA ......................................................................................................................... 8
UITLEG ONTWERP ELEKTRONISCH CIRCUIT .............................................................................................. 8
Mobiliteit en laadsysteem ....................................................................................................... 8
Meetsysteem ......................................................................................................................... 11
Regelsysteem ......................................................................................................................... 13
BENODIGDHEDEN ........................................................................................................................... 20
Elektronica ............................................................................................................................. 20
Constructie ............................................................................................................................. 21
VERLOOP VAN HET PRAKTISCHE DEEL .......................................................................................... 22
CONCLUSIE .................................................................................................................................... 25
BRONVERMELDING ....................................................................................................................... 26
LOGBOEK ....................................................................................................................................... 27
LOGBOEK LISETTE ........................................................................................................................... 27
LOGBOEK RAIMOND ........................................................................................................................ 29
BIJLAGEN ....................................................................................................................................... 31
PLAN VAN AANPAK.......................................................................................................................... 31
SCHAKELING .................................................................................................................................. 33
TEKENING PRINTPLAAT..................................................................................................................... 34
CONSTRUCTIE ................................................................................................................................ 36
FOTO’S ......................................................................................................................................... 37
2
Inleiding
Het onderwerp van dit profielwerkstuk is “De Tournesol” (de Zonnevolger) . Wij willen een
apparaat maken, die zelf automatisch bepaalt waar het sterkste lichtpunt is en daar naar toe
draait.
Zo’n apparaat kan gebruikt worden bij een zonnecollector, om er voor te zorgen dat de
collector altijd in de zon staat (zover dat mogelijk is) of bijvoorbeeld voor een tuinhuisje waarin
je altijd in de zon wilt zitten.
Wij zijn tot dit onderwerp gekomen nadat we besloten hebben dat ons vak natuurkunde ging
worden. Wij zijn toen op www.natuurkunde.nl gaan zoeken naar onderwerpen voor
profielwerkstukken en zijn dit tegengekomen. Het leek ons een uitdaging om te gaan maken en
voor zover het ons bekend was, heeft niemand op het Studiehuis Molenplein/Lyceum aan Zee
dit gemaakt.
Onze onderzoeksvraag is: Hoe maak je een zonnevolger?
Wij willen deze onderzoeksvraag beantwoorden door middel van een aantal deelvragen en
vervolgens ook echt de zonnevolger de gaan bouwen.
De deelvragen zijn:
1. Hoe kun je de positie van de zon bepalen?
2. Welke eisen stellen wij aan onze zonnevolger?
3. Welke motor is geschikt voor de zonnevolger?
4. De elektronica
Bij deze deelvragen hebben we de volgende hypothesen en verwachting:
1. Als we hebben uitgezocht welke manier er zijn om de positie van de zon te bepalen,
zoals door middel van tijdalgoritmen en het sterkste lichtpunt volgen, dan kunnen wij
bepalen welke manier voor onze zonnevolger de beste is.
2. Als we precies weten welke eisen we stellen aan de zonnevolger, dan is het makkelijker
om uit te zoeken wat we dan nodig hebben.
3. Als we weten welke motor we nodig hebben, bijvoorbeeld een servomotor, een
stappenmotor of een elektromotor, dan kunnen we er één gebruiken voor de
zonnevolger.
4. Als we hebben bepaald hoe je elektronisch het sterkste lichtpunt kan volgen,
bijvoorbeeld met behulp van LDRs, fotodiodes en signaalverwerking, dan kunnen we
met deze gegevens beslissen wat we gaan gebruiken voor de zonnevolger.
Als we weten welke onderdelen we nodig hebben, dan kunnen we deze onderdelen
kopen en het ontwerp voor de zonnevolger maken.
Als we een ontwerp van de zonnevolger hebben gemaakt, dan is het voor ons
makkelijker om de zonnevolger te bouwen en een tijdsplan te maken hoe lang het
bouwen gaat duren.
3
Het verslag begint met de drie deelvragen waarin wij bepaalde keuzes hebben gemaakt en in
deelvraag 4 zal de schakeling aan bod komen, evenals de benodigdheden.
Verder zal nog het verloop van het praktische deel te lezen zijn.
De taken zijn als volgt verdeeld:
Lisette heeft de theorie uitgewerkt, gesoldeerd, aan de constructie gewerkt en het verslag
gemaakt.
Raimond heeft de schakeling gemaakt, de benodigdheden uitgezocht, gesoldeerd, de
constructie bedacht en uitgewerkt.
Verder willen wij hier nog de volgende mensen bedanken voor hun tijd en hulp:
De heer S.G.H. Berendsen
De heer en mevrouw Frentrop
De heer A. van Manen
De heer en mevrouw Van Wijngaarden
Ir. J.F.J. Verhage
Raimond Frentrop
Lisette van Wijngaarden
4
1. Hoe kun je de positie van de zon
bepalen?
Er zijn meerdere manieren om de positie van de zon te kunnen bepalen. Een daarvan is met
behulp van tijdalgoritmen.
Voor de bepaling van de positie van de zon met behulp van tijdalgoritmen zijn heel veel
gegevens nodig. Zo heb je de datum en tijd nodig, de lengte- en breedtegraad van het punt
waar de zonnevolger staat. Dit zal dus vele berekeningen en tabellen opleveren. Hieronder
staat in tabel 1 een klein gedeelte van zo’n tabel.
Ook zal het niet altijd even nauwkeurig kunnen zijn, omdat de baan van de aarde elk jaar weer
anders is en ook de snelheid van de draaiing van de aarde langzaam toeneemt.
Er is dus een grote hoeveelheid data, die ingevoerd zal moeten worden op een computer. De
zonnevolger zal op dat moment ook niet meer los kunnen staan van een computer. De
zonnevolger moet zijn gegevens daar vandaan halen.
De zonnevolger zou ook zonder computer kunnen, maar dan zijn er vele chips nodig, zoals
rekenchips. Dit zal de kosten hoog doen oplopen.
Er is een makkelijkere manier om de positie van de zon te bepalen. Dat is door elektronisch het
sterkste lichtpunt te volgen. Dit wordt uitgelegd in deelvraag 4 'De elektronica' onder het kopje
'Meetsysteem' .
Bron: www.astro.uu.nl
5
2. Welke eisen stellen wij aan onze
zonnevolger?
Onze zonnevolger moet aan de volgende eisen voldoen:
Het apparaat moet automatisch op de zon (het sterkste lichtpunt) gericht zijn.
Het moet een stevige basis hebben, anders wordt het apparaat topzwaar.
Het bovenste, tevens draaiende, gedeelte moet steunen op het onderste gedeelte,
anders breekt de as van het motortje.
Het meten van de zonnestand gebeurt door 3 LDRs of fotosensoren.
De zonnevolger moet in ieder geval de horizontale positie van de zon kunnen bepalen.
Eventueel kunnen we nog een tweede systeem maken om de verticale positie van de
zon te bepalen.
De sensoren moeten maar een beperkt aantal graden kunnen “kijken”, anders wordt
het te onnauwkeurig. De kijkgebieden van de sensoren mogen elkaar ook niet of in ieder
geval zo min mogelijk overlappen.
Het geheel moet zo compact mogelijk blijven, om spanningsverlies te voorkomen.
Er is een zonnepaneel nodig om voor de stroomvoorziening te zorgen. Met behulp van
het zonnepaneel worden de batterijen van de zonnevolger opgeladen. Hierdoor kan de
zonnevolger los staan en heeft het geen aansluiting op netstroom nodig.
De motor moet in staat zijn om kleine stappen te maken en nauwkeurig zijn.
6
3. Welke motor is geschikt voor de
zonnevolger?
Elektromotor
Een elektromotor is een apparaat dat elektrische energie omzet in bewegingsenergie. Er
bestaan wisselstroommotoren en gelijkstroommotoren.
Een gelijkstroommotor bevat een draaibare spoel, die zich in een magnetisch veld bevindt. Dit
geldt ook voor een draaispoelmeter.
Die spoel gaat onder de werking van lorentzkrachten draaien, zodra er een stroom doorheen
gestuurd wordt.
Bij een draaispoelmeter wordt die draaiing tegengewerkt door veerkrachten; daardoor draaien
spoel en wijzer slechts over een bepaalde hoek.
Het nadeel van de elektromotor is dat de zonnevolger niet een klein stukje te draaien is, omdat
de elektromotor de spoel blijft draaien. Dit komt doordat steeds na een halve omwenteling de
stroom in de spoel van richting omkeert.
De elektromotor is voor de zonnevolger dus niet van toepassing omdat het om kleine correcties
gaat.
Servomotor
Een servomotor is een motor die gebruik maakt van stuursignalen en referentiesignalen. Een
servomotor bestaat uit een elektromotortje, een gekoppelde potentiometer en
regelelektronica.
De servomotor vergelijkt constant het stuursignaal met het referentiesignaal. Zodra er een
verschilsignaal is, gaat de motor linksom of rechtsom draaien waarbij de potentiometer het
referentiesignaal aanpast. Zodra het verschilsignaal verdwenen is stopt de servomotor.
Het voordeel hiervan is dat de uitslag beperkt kan worden. Dat zoeken wij ook voor de
zonnevolger. Alleen zijn de stappen toch nog te groot en het is een zwaar apparaat.
Stappenmotor
Een stappenmotor is een elektrische motor die gestuurd wordt met digitale pulsen in plaats van
met een constant toegevoegde spanning. Ook is er een pulstrein die zich vertaald in een aantal
omwentelingen, waarbij elke omwenteling een aantal pulsen nodig heeft. Elke puls komt
overeen met een kleine hoekverdraaiing of stap, die slechts een onderdeel is van een volledige
omwenteling.
Een stappenmotor volgt digitale instructies die worden gegeven. Dat is het verschil met andere
typen motoren.
Het voordeel van de stappenmotor is dat die heel nauwkeurig kan zijn. Sommige
stappenmotoren delen de normale stappen ook nog op in halve stappen of microstappen (tot
1/ stap = 0,1125°). Wij hebben een nauwkeurige motor nodig, die hele kleine stappen kan
16
maken om de zon te volgen. Daarom hebben wij voor onze zonnevolger gekozen voor een
stappenmotor.
7
4. De elektronica
Uitleg ontwerp elektronisch circuit
We hebben ons het eerste gedeelte van de tijd vooral geconcentreerd op de manier waarop we
nu eigenlijk de positie van de zon kunnen bepalen en dat gegeven gebruiken om een
stappenmotor aan te sturen. In dit hoofdstuk geven we een uitleg over de manier waarop we
dit hebben gedaan.
Mobiliteit en laadsysteem
We wilden een zonnevolger maken die zo mobiel mogelijk is. Eerst dachten we aan directe
aansluiting op het lichtnet, met daarachter een transformator om het geheel naar het juiste
voltage om te zetten. Hierbij kwamen we alleen een paar problemen tegen:
De motor heeft een ander voltage nodig dan het regelsysteem. Dus zouden er twee
transformatoren nodig zijn, of een transformator met twee secundaire kernen. Op zich
dus een oplosbaar probleem.
De zonnevolger bestaat uit een stator (niet-draaiende onderste deel) en een rotor
(draaiende deel). Er moet een elektrisch contact ontstaan tussen deze twee. Als we een
apparaat willen dat meer dan 360° kan draaien, kan dat niet door middel van draden.
Deze draaien stuk. We zouden dan een draairing moeten gebruiken. Deze bestaat uit
een ring en een sleepcontact, die over deze ring sleept. Zo kan er toch een stroom
lopen. Zelf een draairing maken is echter erg foutgevoelig en er een kopen kost veel
geld.
Daarom hebben we gekozen geen contact te maken met de stator. De enige mogelijkheid is dan
om batterijen te gebruiken. De voordelen:
Het apparaat is volledig mobiel. Het kan overal staan, zelfs in gebieden zonder
elektriciteitsvoorziening.
Er kunnen verschillende voltages gebruikt worden, zonder dat er aparte reeksen
batterijen nodig zijn. Als er een voltage van 3 V nodig is en een voltage van 4,5 V, kun er
simpelweg voor de 3 V een draad afgesplitst worden na 2 batterijen en voor de 4,5 V na
3.
De spanning is veel stabieler dan bij een transformator. Bij een transformator blijft de
spanning toch enigszins fluctueren. Dat is slecht voor de microstep-driver die nodig is
voor de stappenmotor en ook voor de levensduur van veel andere onderdelen.
Helaas kent het ook een belangrijk nadeel: batterijen raken op. De batterijen moeten dus
steeds vervangen worden. Het is slecht voor het milieu en het kost een lading aan geld. Hier
hebben we ook een oplossing voor gevonden: zonnepanelen. Deze laden de batterijen constant
op, waardoor er bijna nooit nieuwe batterijen aangeschaft moeten worden. Natuurlijk gaan
batterijen op gegeven moment lekken, maar dit duurt wel een paar jaar. Het is dus én goed
voor het milieu én het scheelt geld.
8
Voor de zonnepanelen is nog wel een circuit nodig om de batterijen op te laden. De batterijen
die wij zullen gebruiken hebben een capaciteit van 1900 mAh (milliampère per uur). Dat
betekent dat ze zoveel elektrische energie bevatten om een uur lang een stroom van 1900 mA
af te kunnen geven. Gebruiken we 950 mA, dan kan de batterij 2 uur mee. Voor het opladen
betekent dit het volgende: als er 1900 mA stroom op de batterij gezet wordt, is deze in een uur
opgeladen. Dit heet snelladen. Het probleem is dat de batterij ook overladen kan worden en
dus stukgemaakt wordt. Pas bij een laadstroom van 1/10 van de capaciteitstroom is er geen
gevaar meer dat de batterij wordt overladen. Daarom kiezen wij dus voor een laadstroom van
190 mA. In de praktijk zal in onze schakeling deze laadstroom zelfs nog wat lager zijn, omdat de
zonnepanelen samen een stroom van ongeveer 170 mA afgeven.
De eerste fout…
Wij hadden een schakeling gevonden in het boek dat wij hebben gebruikt, waarmee NiCd en
NiMH batterijen van 1900 mAh veilig kunnen worden opgeladen, dus zonder het gevaar van
overladen. Deze schakeling misbruikt een spanningsstabilisatorchip (LM317) om de stroom op
een constant niveau te houden, namelijk 190 mA. De schakeling zelf heeft een
voedingsspanning van 3 V nodig. Daarnaast er is voor elke batterij die er gebruikt wordt 1,2 V
meer nodig. Omdat we 4 batterijen dachten nodig hebben (zie ‘Verloop van het praktische
deel’), hebben we dus een voedingsspanning van 7,8 V nodig. De zonnepanelen die wij
gebruiken geven volgens de gegevens elk afzonderlijk een spanning van 8,4 V af, genoeg dus
om de schakeling te laten werken. Later ontdekten we dat de zonnepanelen in daglicht veel
meer spanning afgeven dan in kunstlicht (lamplicht), namelijk samen zo’n 19 V in daglicht, dus
per zonnepaneel 9,5 V en samen maar 5,5 V in kunstlicht, dus 2,75 V per stuk.
De schakeling staat hiernaast. De IC zorgt
dat de spanning tussen 'uit' en 'adj.'
constant 1,25 V blijft. Dit doet hij door zijn
interne weerstand tussen 'in' en 'uit' te
veranderen. Het is dus bekend dat er een
spanning van 1,25 V komt te staan en dat er
een stroom van 0,19 A moet gaan lopen. De
weerstand R1 moet zo gekozen worden dat
die stroom inderdaad gaat lopen. 𝑈 = 𝐼 ∙ 𝑅,
𝑈
1,25
dus 𝐼 = 𝑅 . Hieruit volgt 𝐼 = 0,19 = 6,58 Ω.
Omdat zo'n weerstand niet bestaat, nemen we 6,8 Ω. Dan gaat er iets minder stroom lopen,
maar dat is niet erg. Vooral omdat er geen stroom van 190 mA loopt, maar een stroom van 170
mA.
De LED die in de schakeling is opgenomen brandt alleen als er ook daadwerkelijk een stroom
loopt. Dit vraagt weliswaar stroom, maar zo weinig, dat het niet erg is. De motor en het meeten regelsysteem hebben in principe ook niet zoveel stroom nodig.
9
Even een overzicht van de componenten:
Component
Type/waarde
Batterijen
4 batterijen van elk 1,5V; 1800mAh
LM317
Spanningsstabilisator
Diode
Een high-efficiency LED, want die heeft maar 2mA nodig
Transistor
Type BC547B, op aanraden van het boek
C1
Condensator van 10µF; bestand tegen 25V
R1
Weerstand van 6,8Ω; 5W; tolerantie het liefst 5% of minder
R2
Weerstand van 180Ω; 5W; tolerantie ook het liefst 5% of minder
Dit bleek alleen niet te werken. Zie hiervoor het hoofdstuk ‘Verloop van het praktische deel’.
We hebben op internet een nieuwe schakeling gezocht. Deze was veel simpeler en gebruikte
alleen 2 weerstanden en een condensator. Die condensator zorgt ervoor dat de zonnepanelen
onbelast blijven. Het probleem met zonnepanelen is dat ze geen reëel vermogen hebben. Op
het moment dat een schakeling om stroom gaat vragen keldert de spanning. Dan kunnen de
batterijen niet meer opgeladen worden, want daarvoor moet de spanning minimaal die van de
batterijen zijn. Met die condensator
is dit probleem opgelost. Voor het
berekenen van de juiste
weerstandswaardes zijn we
uitgegaan van de formule die de
𝑉𝑜𝑢𝑡
website geeft: 𝑅2 = 𝑅1 ∗ ( 1,25
− 1).
Als R1 een waarde van 270 Ω heeft
en de batterijspanning 7,2 V is, geeft
de formule een weerstand 1285 Ω
voor R2. De beste
weerstandswaarde is dan 1,2 kΩ of
1,5 kΩ. Wij hebben gekozen voor de
eerste.
10
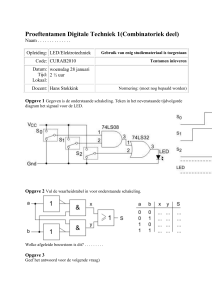
Meetsysteem
Dit deel bepaalt of de motor moet draaien en zo ja, welke kant op. Er zijn 3 situaties mogelijk:
1. De zon (het sterkste lichtpunt) staat aan de 'achterkant'. In dit geval moet de
zonnevolger dus net zo lang ronddraaien totdat de zon weer aan de voorkant staat.
2. De zon (het sterkste lichtpunt) staat net links van de gewenste lijn. De zonnevolger moet
iets naar links draaien, totdat de zon wél in het midden staat.
3. De zon (het sterkste lichtpunt) staat net rechts van de gewenste lijn. De zonnevolger
moet iets naar rechts draaien, totdat de zon wél in het midden staat .
Om te bepalen welk van deze drie gevallen waar is, hebben we de volgende opstelling bedacht.
Deze maakt gebruik van 3 fotoweerstanden (LDR). Hoe meer licht er op de weerstand valt, hoe
lager de weerstandswaarde van de fotoweerstand wordt. Dus als er veel licht op de LDR valt,
laat deze ook veel spanning door.
De pijl geeft de gewenste lijn aan waarop de zon moet zitten. De rode blokjes met de nummers
erbij zijn de fotoweerstanden. Als LDR 3 de hoogste
spanning doorlaat (let op: de laagste weerstandswaarde!)
geldt situatie 1: de zon staat aan de achterkant. In dit geval
zal de motor worden aangestuurd om met de klok mee net
zolang te draaien totdat LDR 1 een hogere spanning
doorlaat. Dan staat de zon namelijk weer meer aan de
voorkant dan aan de achterkant.
Als LDR 1 een hogere spanning en lagere weerstandswaarde
heeft dan LDR 2 geldt situatie 2: de zon staat iets links van de lijn en de zonnevolger draait net
zolang tegen de klok in totdat de waardes van LDR 1 en LDR 2 gelijk zijn.
Dan het laatste geval. Dat spreekt nu natuurlijk voor zich: als LDR 2 meer spanning doorlaat dan
LDR 1, staat de zon iets rechts van de middellijn en zal de zonnevolger dus net zo lang met de
klok mee draaien totdat de waardes van LDR 2 en LDR 1 weer gelijk zijn.
Maar er is een probleem: elke weerstand is uniek. Als er drie fotoweerstanden van hetzelfde
type worden aangeschaft, kunnen ze enorm in weerstandswaarde verschillen. Ze moeten dus
geijkt worden. Vervolgens moeten ze in de uiteindelijke schakeling gecompenseerd worden. Dit
is te doen met serieweerstanden. Het grote nadeel hiervan is: in de winter is er niet zoveel
zonlicht om de precieze verschillen te bepalen. Natuurlijk zijn de weerstanden geen perfecte
ohmse weerstanden, dus we beperken ons voor het afstellen van de fotoweerstanden tot het
gebied waarin de fotoweerstanden worden blootgesteld aan een hoeveelheid licht die
vergelijkbaar is met een (zonnige) dag, dus het lichtintensiteitgebied waarin de verschillen
gemeten moeten worden.
Om het instellen te vergemakkelijken, maken we
geen gebruik van ingewikkelde berekeningen om
de waarden van serieweerstanden te bepalen die
het verschil in weerstandswaarde bij dezelfde
lichtintensiteit compenseren. In plaats daarvan
gebruiken we een potmeter en een
brugschakeling. Links staat de schakeling. Aan het
bovenste baantje zit aan de 7,2 V verbonden, de
11
onderste aan de 0 V. De bovenste twee componenten zijn de fotoweerstanden. De twee vaste
weerstanden hebben een redelijk hoge waarde om zoveel mogelijk spanning door te laten gaan
naar de afsplitsingen tussen de vaste weerstanden en de LDRs. Met deze brugschakeling wordt
de spanning beter verdeeld en is het te regelen met de potmeter van 10 kΩ onderaan de
tekening.
Maar uiteindelijk draait alles eigenlijk om de potmeter. Deze compenseert het verschil tussen
de twee weerstanden. Als deze naar links gedraaid wordt, wordt de spanning tussen aarde (er
staat 0 V, maar deze 0 V gaat verbonden worden aan aarde) en de draad die naar links aftakt
kleiner en de spanning tussen aarde en de draad die naar rechts
aftakt groter. Als de potmeter naar rechts gedraaid wordt, gebeurt
dat precies andersom.
De derde fotoweerstand komt niet in een brugschakeling te staan.
Voor de waarde van deze fotoweerstand nemen we degene met
de grootste weerstandswaarde bij dezelfde lichtintensiteit. Als de
weerstandswaarde van de achterste LDR maar groter is dan die
van de linker LDR, gaat het hele systeem vanzelf werken.
Vervolgens gebruiken we wel hetzelfde systeem van afsplitsing:
een LDR aangesloten aan 7,2 V in serie met een vaste weerstand van 10 kΩ die rechtstreeks is
verbonden met de 0 V. Tussen deze twee componenten tappen we de spanning af van de
achterste LDR.
Wat de lengtes van de 'schotten' tussen de 3 fotoweerstanden betreft: zolang de achterste
fotoweerstand maar geen zon vangt als een van de anderen dat doet, is het goed. Deze moet
dus achterop het apparaat, het liefst van boven wat afgedekt, zodat een hoge zon niet toch op
de LDR schijnt. Verder moet er tussen de twee voorste LDRs een flinke tussenwand zitten.
Omdat we deze van triplex maken hoeft hij niet zo erg lang te zijn, want dat maakt de hoek
waaronder de zon in kan vallen vanzelf al heel klein. Wij hebben hiervoor gewoon zoveel lengte
genomen als onze opstelling bood.
12
Regelsysteem
Dit stuk van de schakeling is voor een deel heel simpel en voor een deel wat moeilijker. Dit deel
is eigenlijk weer onderverdeeld in 3 delen:
1. Staat de zon voor of achter?
2. De zon staat voor:
a. Moet met de klok mee of tegen de klok in gedraaid worden?
b. Moet er überhaupt gedraaid worden? Of is het verschil te klein?
Punt 1:
Bij het bepalen van de positie van de zon, is de meest belangrijke vraag of de zon eigenlijk wel
aan de voorkant staat! Anders moet er helemaal de andere kant op gedraaid worden! Om dit te
bepalen wordt de achterste LDR met de LDR linksvoor vergeleken. Als de waarde van de
achterste LDR lager is en daar dus meer spanning loopt, staat de zon aan de achterkant. Is dit
inderdaad zo, dan moet simpelweg het apparaat net zolang naar links draaien totdat hij de zon
aan de voorkant heeft. Dit wordt gedaan door de waarden van beide LDRs te vergelijken met
behulp van een Operational Amplifier (opamp). De basisfunctie van dit component is het
vergelijken van twee waarden. Als de waarde op de niet-inverterende ingang (+) hoger is dan
op de inverterende ingang (-) dan geeft de opamp de positieve voedingswaarde af (in onze
schakeling 7,2 V). Is het precies andersom, dan geeft hij de lage waarde, in ons geval dus 0 V.
Het nadeel is dat het een versterker is. Dat betekent dat de opamp niet in één keer omslaat van
hoog naar laag of andersom, maar langzamerhand. Het enige wat hij dus doet is het versterken
van het verschil tussen de beide ingangen. Door een terugkoppelweerstand toe te voegen aan
de inverterende ingang is de grootte van deze versterking te regelen. Er is gelukkig een andere
oplossing: de terugkoppelweerstand niet tussen de – en de uitgang plaatsen, maar tussen de +
en de uitgang. Dan verandert plotseling de hele werking van de opamp en noemt men het een
Schmitt Trigger.
Nu even wat extra informatie: in ons apparaat zit er aan de as van het
motortje een wieltje vast dat langs de binnenkant van het onderste,
niet-roterende gedeelte loopt. Moet de zonnevolger dus rechtsom
gaan, zal het motortje linksom moeten draaien en vice versa. Ook is het
zo dat als de motor linksom moet draaien, de CW/CCW ingang van de
motorchip (zie tabel 2 verderop in het verslag) hoog moet zijn en laag
voor rechtsom.
Als we dus willen dat de zonnevolger linksom draait, zal de CW/CCW
een hoge spanning moeten ontvangen. Om precies te zijn tussen de 3,5
en 7,6 V in ons geval. Onze opamp moet dus een hoge spanning afgeven
als de LDR achter meer licht vangt, dus meer spanning afgeeft. Als de
achterste LDR op de + van de opamp wordt aangesloten en de linker LDR op de -, wordt het
gewenste resultaat verkregen.
Nog even over het aarden van de schakeling: in Crocodile Technology ontdekten we dat het
behoorlijk belangrijk is om de opamps te aarden. Anders gaan ze vreemde dingen doen en klopt
er niks meer van de spanningen die op de uitgang komen te staan. We hebben echter gemerkt
dat dit in de praktijk geen probleem is.
13
Deel 2b is wat lastiger. We willen dat er tussen de linker en de rechter LDR een
minimumverschil is voordat de motor gaat draaien. Anders bestaat de kans dat de motor
constant blijft trillen, omdat de LDRs niet precies dezelfde weerstandswaardes hebben bij
gelijke lichtintensiteit. Ook dit probleem is gelukkig op te lossen met behulp van Schmitt
Triggers. Het grote voordeel van Schmitt Triggers is dat ze gebruik kunnen maken van het
zogeheten hysteresis-effect. Dit wil zeggen dat het omslagpunt van de opamp niet precies ‘in
het midden’ ligt. Als beide LDRs gelijke spanning afgeven is de uitgang van de Trigger laag. Maar
als één van de twee een hogere (aan de + van de opamp) of lagere (aan de – van de opamp)
spanning gaat afgeven, slaat de Trigger niet meteen om. Dat gebeurt pas als het verschil tussen
de twee ingangen (V1 en V2) groter wordt dan een bepaald niveau. Er zit dus als het ware een
soort van vertraging in het systeem. Er is een gebied waarin de beide LDRs dus een
verschillende weerstand hebben en de uitgang van de opamp toch laag blijft! Dat is exact wat
we moeten hebben! Het nadeel: het werkt maar 1 kant op. Als de + lager wordt of de – hoger
blijft de uitgang van de opamp laag, ook als het verschil erg groot wordt. Om dan toch ook een
hoge spanning te krijgen zullen we dus een tweede Schmitt Trigger moeten gebruiken die de
twee ingangen precies omdraait. Dus bij de ene Trigger zit de linker LDR aan de + ingang en de
rechter LDR aan de – ingang en bij de andere Schmitt Trigger zitten ze precies andersom. Zo
ontstaat er een redelijke marge waarin geen van beide opamps een hoge spanning afgeeft. En
daar hebben we ons gewenste minimale verschil.
Of er met de klok mee of tegen de klok in gedraaid moet worden is nu makkelijk te bepalen. Dat
gebeurde al met de vergelijking tussen voor en achter, maar de zonnevolger moet als de zon
voor staat natuurlijk ook mee kunnen draaien. Gelukkig hebben we hier eigenlijk al de
schakeling voor. We kunnen namelijk simpelweg een aftakking maken bij één van de twee
Schmitt Triggers van deel 2b. Als de linker een hogere spanning geeft dan de rechter LDR moet
er tegen de klok in gedraaid worden dus hebben we een hoge spanning nodig op de CW/CCW
ingang van de motor IC. De Schmitt Trigger met de + ingang aan de linker LDR voldoet aan deze
voorwaarde. Dus als we de uitgang van deze Trigger verbinden met de CW/CCW ingang krijgen
we heel gemakkelijk dat resultaat.
Eindelijk zijn we bij het onderdeel waar het om gaat: de motor! Deze wordt aangestuurd met
een motorchip van het merk Nanotec, type IMT 901. Deze is geschikt voor zogeheten bipolaire
motoren (motor met twee wikkelingen en dus 6 aansluitingen). Hieromheen moeten nog
allerlei componenten worden aangesloten om de motor IC als het ware te configureren. Ook
moet er een circuit worden toegevoegd die pulsjes afgeeft om de motor stapjes te laten maken.
Deze komt later. Eerst een overzichtje van de pinnen van de motor IC IMT 901 op de volgende
pagina.
14
Pin nummer
1
2
Afkorting
SG
RESET
3
ENABLE
4
OSC
5
CW/CCW
6
CK2
7
CK1
8
9
M1
M2
10
REF IN
11
MO
12
NC
Omschrijving
Signal Ground: verbonden aan de 0 V als lage referentie.
Zolang deze hoog is wordt de motor steeds weer opnieuw
aangestuurd. Is deze ingang laag dan blijft de motor stil staan.
Er blijft wel spanning op staan!
Als op deze pin een hoge spanning staat zorgt de IC dat er over
de motor geen stroom loopt. Geen stroomverlies dus en de
motor wordt ook niet warm. Een lage spanning zorgt juist voor
het omgekeerde.
De oscillatie-ingang van de IC. Hier moet altijd een condensator
van 3,3 nF aan verbonden zijn die aan 0 V vast zit.
Een hoge spanning zorgt bij onze opstelling voor een beweging
tegen de klok in, een lage spanning juist met de klok mee.
Wij hebben deze ingang via een weerstand van 10 kΩ
verbonden met de hoge voedingsspanning. Deze ingang zorgt
voor de helft van de stappen. CK1 zorgt voor de andere helft.
Als één van de twee niet gebruikt wordt zoals bij ons (CK2)
maakt de motor dus steeds twee stappen wel en twee niet waar
het wel zou kunnen.
Deze hebben wij aangesloten op een 555-timer schakeling die
we hieronder nog zullen geven. Zo krijgt de motor IC steeds een
signaaltje om de motor een stap te laten maken.
Deze twee hebben samen een uitleg nodig. Zie de volgende
tabel:
Input
Mode
M1
M2
L
L
1/1 stap
H
L
1/2 stap
L
H
1/4 stap
H
H
1/8 stap
Wij hebben ervoor gekozen om M1 laag te maken en M2 hoog,
dus steeds 1/4 stap te maken. 1 stap is gelijk aan 1,8°. 1/4 stap is
dus gelijk aan 0,45°.
Deze pin beslist of de motor de volledige stroom krijgt of maar
65% daarvan. Op deze manier is de kracht en de snelheid van de
motor aan te passen. Wij willen gewoon de volledige
motorkracht dus moeten wij hem via een weerstand van 10 kΩ
verbinden met de batterijspanning.
Deze pin is geen ingang maar een uitgang. In complexe
schakelingen waarbij ook terugkoppeling van de motor IC nodig
is kan deze gebruikt worden voor de rest van de schakeling.
Not Connected
15
13
Vcc
14
15
NC
VMB
16
17
18
øB
PG-B
NFB
19
20
21
22
23
24
25
Tabel 2
øB
øA
NFA
PG-A
øA
VMA
NC
De motorspanning. Voor ons is dit de batterijspanning van 7,2
V.
Not Connected.
De motorspanning die over spoel B van de motor moet lopen.
De batterijspanning.
De aansluiting van spoel B. Zie het datablad van de motor.
Power Ground B: de aarde voor spoel B. De 0 V lijn.
Deze bepaalt de stroom die over de motor moet lopen. Een
weerstand van 0,8 Ω tussen deze pin en 0 V zorgt voor 1 A
stroom over motorspoel B. Wij willen 1,5 A dus hebben we een
weerstand van 1,2 kΩ of 1,5 kΩ nodig. Een beetje meer stroom
kan geen kwaad.
Zie pin 16.
Zie pin 16.
Zie pin 18 maar dan voor spoel A.
Zie pin 17 maar dan voor spoel A.
Zie pin 16.
Zie pin 15 maar dan voor spoel A.
Not Connected.
Het datablad van de motor IC (zie ‘Bronvermelding’) geeft ons al een aardig aantal oplossingen
voor hoe we de pinnen moeten aansluiten. Bij een aantal pinnen is er maar 1 manier, die ze dan
ook aangeven. Voor de overige pinnen is ook het gebruik zeer duidelijk. Daarom zullen we
alleen die pinnen bespreken waar we zelf nog wat voor moesten doen.
Wij hebben besloten de CK1 pin te gebruiken om pulsjes aan de motor te geven. Eerst hebben
we dit geprobeerd met een inverterende opamp, zonder succes. Toen kwamen we met het idee
van een 555-timer. De LM555 IC is al ongeveer net zo oud als
het begrip elektronica. Het enige wat deze chip doet is een
blokspanning geven. Het grote voordeel van deze IC is echter
dat hij op heel veel manieren een blokspanning kan geven.
Hij kan een pulsje geven als hij zelf een pulsje krijgt, of
constant blijven fluctueren. Ook kan hij op enorm hoge en
lage frequenties pulsjes geven. Wij zijn gegaan voor de
meest simpele en meest gebruikte toepassing van een 555:
blijven pulseren. De schakeling hiervoor is ook zeer
standaard. Zie het plaatje hiernaast.
De schakeling hiernaast zorgt voor een zogeheten astabiele
555-schakeling. Dat betekent dat de 555 constant
omschakelt van hoog naar laag, dus een constante
blokspanning produceert. Vin is de voedingsspanning van de
schakeling.
16
De hoge fase van de blokspanning is gelijk aan Vin. Op Vuit staat deze blokspanning. Die
fluctueert tussen de waarde van Vin en V0. De frequentie van de blokspanning hangt af van de
waardes van R1, R2 en C1.
Om de waarden van deze drie te berekenen moet bekend zijn hoe lang de spanning hoog blijft
en hoe lang hij laag blijft. Hiervoor zijn de volgende formules:
𝑡ℎ𝑜𝑜𝑔 = 0,693 ∗ (𝑅1 + 𝑅2 ) ∗ 𝐶1 ∗ 100
𝑡𝑙𝑎𝑎𝑔 = 0,693 ∗ 𝑅2 ∗ 𝐶1 ∗ 100
Wij hebben gekozen voor de volgende configuratie:
R1 = 1 kΩ
R2 = 2,5 kΩ
C1 = 100 μF. Dit moet een elektrolytische condensator zijn. Gewone condensatoren gaan niet
tot 100 μF.
Dit betekent dus dat:
𝑡ℎ𝑜𝑜𝑔 = 0,693 ∗ (1 · 103 + 2,5 · 103 ) ∗ 1,0 · 10−6 ∗ 100 = 0.24 s
𝑡𝑙𝑎𝑎𝑔 = 0,693 ∗ 2,5 · 103 ∗ 1 · 10−6 ∗ 100 = 0.17 s
Helemaal gelijk zijn deze twee waarden niet te krijgen. Dat is het enige gebrek aan de 555 IC.
Maar op deze manier krijgen we toch iets meer dan 2 pulsen per seconde. De frequentie van
onze blokspanning is namelijk 2,4 Hz. Het enige wat we met deze schakeling moeten doen: V uit
aansluiten op de CK1 ingang van de motor IC.
De CW/CCW ingang van de motor IC bepaalt of er linksom of rechtsom gedraaid wordt. Deze
ingang moet daarom verbonden worden met de twee Schmitt Triggers, zoals hierboven al is
beschreven. Hier moet nog wel 1 aantekening bij gemaakt worden: omdat de Schmitt Triggers
een terugkoppelweerstand hebben, kunnen niet zomaar de twee uitgangen van de Triggers aan
elkaar gekoppeld worden en naar de CW/CCW ingang leiden. Als over de ene namelijk een hoge
spanning staat en over de andere een lage, kan de hoge spanning ook de Trigger met de lage
uitgangsspanning beïnvloeden. Hierdoor klopt de schakeling niet meer. Om dit te voorkomen
moet er een diode in doorlaatrichting worden aangesloten op beide uitgangen van de Schmitt
Triggers. Hierna is het veilig om de twee samen te laten komen.
Dan nog één ding. De motor wordt relatief gezien maar een heel klein deel van de dag echt
gebruikt. Dus heeft de motor ook maar een heel klein deel van de dag stroom nodig. Als er toch
stroom op de spoelen van de motor blijft staan, heeft dat twee nadelige
gevolgen:
Het kost stroom. De spoelen hebben een grote weerstand
waardoor ze stroom verbruiken. Dan zijn ’s ochtends dus de
batterijen leeg, wat we niet willen;
Door die grote weerstand worden de spoelen en dus de motor
warm. Dit is niet echt bevorderlijk voor de levensduur van de
motor.
17
Gelukkig heeft Nanotec ook hieraan gedacht. Er zit een aparte ingang op de motor (pin 3:
ENABLE) waarmee geregeld kan worden of er überhaupt stroom over de spoelen moet staan.
Zie tabel 2 voor een beschrijving van deze pin. We hebben nu 1 probleem: als de motor moet
draaien heeft deze pin een lage spanning nodig, maar onze Triggers geven dan juist een hoge
spanning!
Dit is echter simpel op te lossen. We gebruiken gewoon nog een Schmitt Trigger en maken deze
zo dat hij geen hysteresis vertoont en een omslagpunt heeft van ongeveer de helft van de
voedingsspanning. In de schakeling hiernaast is dit te zien. R1 zit verbonden aan de
voedingsspanning, R2 aan de 0 V. Ze hebben dezelfde weerstandswaarde, waardoor de
voedingsspanning precies door twee wordt gedeeld. R3, R4 en R5 hebben ook dezelfde
weerstandswaarde. Aan R4 komen alle drie de Schmitt Triggers te zitten. Let op: tussen de
Schmitt Triggers en de weerstand R4 moeten ook diodes zitten, anders ontstaat het probleem
van verkeerde terugkoppeling weer!
Alle verschillende onderdelen van de schakeling zijn nu besproken. Als laatste nog een paar
mededelingen:
Toen we de schakeling aan het maken waren, kwamen we erachter dat de spanningen
in de brugschakelingen helemaal scheef werden getrokken. Als de LDRs van links en
rechts in hetzelfde licht stonden, liet de ene een spanning van ongeveer 0,5 V door,
terwijl de andere rond de 2 V gaf! Raimonds opa heeft ons vervolgens het begrip
ingangs- en uitgangsimpedantie geleerd: de ingangsimpedantie van de Schmitt Triggers
– dus de weerstand voor de opamps – was veel te laag. De opamps belastten hun beide
ingangen echter heel erg. Hierdoor werd dus de brugschakeling veel te veel belast en
werden de spanningen hiervan scheefgetrokken. Om dit te voorkomen hebben we
weerstanden van ieder 100 kΩ gebruikt aan de ingangen van de opamps, de zogeheten
stuurweerstanden. Daarna hebben we de waarde van de terugkoppelweerstanden
bepaald. Voor de drie Schmitt Triggers die de LDRs vergelijken hebben we een waarde
van 680 kΩ genomen. Dit hebben we niet uitgerekend, omdat dat bijna onmogelijk is
met op opamps gebaseerde Schmitt Triggers, maar we hebben dit geschat met behulp
van Crocodile Technology. De terugkoppelweerstand van de Schmitt Trigger die
verantwoordelijk is voor de ENABLE ingang van de motor IC hebben we een weerstand
van 100 kΩ genomen. Hierdoor is de hysteresis van de Trigger gelijk aan 0 en versterkt
hij het signaal ook niet.
Om de brugschakeling nog verder te ontlasten hebben we de weerstanden in de
brugschakeling alle twee een waarde van 1 kΩ gegeven. De weerstand van de potmeter
is niet zo heel belangrijk omdat hij mooi in het midden staat en de weerstand aan beide
kanten dus ongeveer gelijk is. De potmeter hebben we dus 10 kΩ gemaakt, omdat dat
een heel gangbaar formaat is.
Omdat we toch 1 kΩ weerstanden over hadden, hebben we de spanningsdeler van de
laatste Schmitt Trigger (de ENABLE-Trigger) beiden 1 kΩ gemaakt. De stroom die
hierdoor ontstaat is niet belangrijk, zolang de spanning tussen de twee weerstanden
maar ongeveer de helft van de voedingsspanning is.
18
De weerstanden op de printplaat zien er misschien wat reusachtig uit. Dat was een
foutje. Bij Conrad hadden ze niet anders dan deze weerstanden. Die zijn echter voor
5 W. Eigenlijk is dat helemaal niet nodig voor deze schakeling. De weerstanden die we
nog bij Hobbyrama hebben gehaald zijn 1,2 W en dat voldoet prima. Het zou de
schakeling er een stuk minder vervaarlijk hebben laten uitzien.
Door een aantal aanpassingen die achteraf nog gemaakt moesten worden (zie ‘Verloop
van het praktische deel’) waren er toch een aantal elektronicadraden nodig om de
afstanden te overbruggen. Aanvankelijk waren het er een stuk of 4, maar na die
aanpassingen is het toch een stuk meer geworden. Helaas.
De 5 kleine potmeters die op de printplaat aanwezig zijn, staan daar met een goede
reden. Het probleem van de LM741 is dat de lage uitgangswaarde niet exact gelijk is aan
de negatieve voedingsspanning (in dit geval 0 V), maar daar ongeveer 2 V boven ligt. De
motor IC wil echter als lage spanning maximaal 1,5 V hebben. Gelukkig heeft de LM741
twee uitgangen (“offset null”) waarmee dit enigszins verholpen kan worden. Tussen
deze twee uitgangen moet een potmeter van ongeveer 10 kΩ geplaatst worden,
waarvan de regeluitgang is verbonden met 0 V. Zo is het probleem niet helemaal op te
lossen, maar wel genoeg.
In de schakeling van de motor IC staat niet of een condensator een elco moet zijn of
niet. Er geldt echter: alle condensatoren vanaf 100 μF zijn elco’s.
19
Benodigdheden
Elektronica
Zonnepaneel
Fotoweerstand
IC LM317
713 W
type 1951
Weerstand
Weerstand
Elektrolytische condensator
Elektrolytische condensator
Weerstand
Weerstand
Weerstand
IC LM555 timer
IC LM741 opamp
IC voet
Condensator
Condensator
Diode
Diode
Potmeter, met regelstokje
Potmeter, zonder regelstokje
Stappenmotor
Batterij NiMH oplaadbaar
Batterijhouder
Koellichaam
Printplaat
High-efficiency LED
Weerstand
Weerstand
Weerstand
Elektrolytische condensator
1,2 kΩ
270 Ω
100 µF
100 µF
2,5 kΩ
10 kΩ
1 kΩ
DIP8
3,3 nF
100 nF
type 1N4007
type BYV28-200
10 kΩ
10 kΩ
SP4275M0806-A
1,2 V
2 stuks
3 stuks
1 stuk
5W
5W
63 V
25 V
5W
5W
0,25 W
150 mW
1900 mAh
type SK104
2 mA
100 kΩ
680 kΩ
1,5 kΩ
1000 µF
1,2 W
1,2 W
5W
63 V
1 stuk
1 stuk
1 stuk
1 stuk
1 stuk
5 stuks
6 stuks
1 stuk
4 stuks
5 stuks
1 stuk
1 stuk
4 stuks
4 stuks
1 stuk
4 stuks
1 stuk
6 stuks
1 stuk
1 stuk
2 stuks
1 stuk
6 stuks
3 stuks
2 stuks
1 stuk
20
Constructie
Perspexplaat
Hout
Triplex
Wieltje
Metalen pin
Placemat
Rubbertape
Zwart karton
Zwarte verf
Dubbelzijdig montage tape
Velpon
Montage Kit
Bison Hardplastic lijm
5 stuks
21
Verloop van het praktische deel
Vol goede moed zijn wij aan het bouwen van de zonnevolger begonnen.
Alle componenten hadden we besteld, ze waren binnen gekomen, dus we konden beginnen.
Maar dat bleek moeilijker dan gedacht.
Ten eerste hadden we geen goede soldeerbout. Degene die wij hadden was veel te stomp en te
breed en dus niet geschikt voor elektronica. Daarom hebben wij een soldeerbout gekocht die
daar wel geschikt voor was.
Enfin, we gingen weer vol goede moed verder. Maar op school schiet het maar niet op. In die
paar tussenuren is net je soldeerbout warm wanneer de schoolbel al weer gaat om aan te
geven dat het volgende lesuur begonnen is. Daarom hebben we besloten om bij Raimond thuis
te gaan werken.
Dus we zaten elk weekend bij Raimond aan het profielwerkstuk. Maar ook dat liep helemaal
lekker. Het was zo veel werk om alle componenten te solderen, dat hadden we niet helemaal
ingeschat. Ook hebben we achteraf gezien de fout gemaakt om geen tekening van de printplaat
te maken, maar hebben we gewoon maar alles gesoldeerd. Dat leverde een schakeling op die
werkelijk iedereen pijn deed om naar te kijken. Alles zat schots en scheef over elkaar heen
gesoldeerd. Ook hebben we in onze onwetendheid niks doorgemeten. Toen alles gesoldeerd
was, bleek toen ook dat de schakeling het niet deed.
In eerste instantie deed het laadsysteem het niet. Het lampje dat we hadden ingebouwd in het
laadsysteem deed het eerst wel, maar de batterijen werden niet opgeladen. Toen hebben
geprobeerd om het laadsysteem het wel te laten doen door een aantal nieuwe verbindingen te
leggen en anderen weer te verbreken, maar toen brandde de LED niet. Een andere keer
knipperde het lampje weer. Daar ging onze hoop in die moeilijke tijd! We zijn een week bezig
geweest om het probleem te zoeken in het laadsysteem. We hebben onder ander de hulp van
Raimonds opa gevraagd.
De meest logische oplossing was dat de LM317 IC kapot was. Die wilden we vervangen, maar er
was op dat moment geen nieuwe te krijgen, waardoor we vier dagen daarop hebben moeten
wachten, om er daarna achter te komen dat het toch niet aan het IC heeft gelegen. Uiteindelijk
hebben we een hele nieuwe schakeling gevonden op internet. Die hebben we gesoldeerd op
een tweede, kleinere printplaat. Deze bleek wel te werken. Gelukkig maar! Eindelijk iets wat
gelukt is met al die tegenslagen. Ons eerste puntje hoop! Wat dan ook uiteindelijk het
probleem is geweest in de eerste schakeling zijn we nog steeds niet uit: het kan zijn dat de
schakeling die we uit een boek hebben gehaald niet klopt of dat een van de componenten de
geest heeft geven. De enige mogelijkheid zou dan de transistor zijn. En onze eerste minachting
van Elektuur was een feit…
In de tussentijd bleek ook de rest van de schakeling niet te werken. We hebben de hele
schakeling nagekeken en alles doorgemeten. Het bleek dat er twee diodes verkeerd om zaten:
normaal betekent een streepje op een component dat die kant de negatieve kant is, maar bij
diodes betekent dat juist dat die kant de pósitieve kant is. Die zaten alleen helaas helemaal
onder de weerstanden zaten verstopt. Die moesten dus los om de diodes te kunnen omdraaien
en daarna hebben we ze weer vast gezet. Het was een gigantisch gepriegel.
22
Hierna hebben we de schakeling weer doorgemeten, maar hij werkte nog steeds niet. Het bleek
dat er een connectie gelegd was tussen twee banen, die er niet moest zijn. Het was alleen zo’n
wirwar van weerstanden dat we er niet meer bij konden komen. We hebben anderhalve dag
lang geprobeerd die verbinding los te halen, maar toen hebben we toch de schakeling even aan
de kant gezet en zijn we verder gegaan met de constructie van de zonnevolger.
We hebben een tekening gemaakt van de constructie en die gemaakt. Dat ging gelukkig wel
goed. We zijn begonnen met de onderplaat en de schijf die moet gaan draaien. Daarna hebben
we de wieltjes eronder gezet en van perspex een dak gemaakt. Hierna hebben we nog schotten
gemaakt voor de fotoweerstanden.
Toen hebben we besloten om weer verder te gaan met de schakeling. Omdat we gewoonweg
niet bij de fout konden komen en het zo’n onduidelijke wirwar van componenten was, hebben
we besloten om alles los te solderen en op een nieuwe printplaat opnieuw te gaan beginnen
met een duidelijke tekening erbij en steeds weer alles door te meten! Dat is bij de eerste poging
een fout van ons geweest. We hebben nu ook gekozen voor een printplaat te gebruiken die
allemaal ‘ eilandjes’ heeft in plaats van een printplaat met ‘ banen’.
Het was veel makkelijker om te solderen met de tekening ernaast! We hebben in één middag
de hele schakeling kunnen solderen! Waarom hebben we die tekening niet eerder gemaakt?!
Ook hier hebben we dus van geleerd. Net zoals van het feit dat je dus steeds alles moet
doormeten, zodat je er meteen achter komt als je iets fout hebt gedaan.
Vervolgens zijn we weer verder gegaan met de constructie. We hebben 'twee zolderkamertjes'
gemaakt in de constructie. Hier moeten de fotoweerstanden komen. De zolderkamer hebben
we zwart geverfd om te voorkomen dat er vals licht op de fotoweerstanden valt door spiegeling
op het lichte hout.
De volgende keer zijn we weer verder gegaan met de schakeling. De motor bleek te werken,
alleen bleef die constant doordraaien, doordat het verschil tussen de fotoweerstanden te groot
was. Er is weer veel overleg geweest met de opa van Raimond (een aantal maal per dag en dat
een paar dagen lang). Er was bedacht dat in de brugschakeling de vaste weerstanden van 10 kΩ
vervangen moesten worden door weerstanden van 1 kΩ, bij de 2 opamps voor het verschil
moesten de weerstanden van 1 kΩ vervangen worden door 10 kΩ en de 422 Ω vervangen
wordt door 5 kΩ (zie de huishoudelijke opmerkingen bij ‘4. De elektronica’.
In de tussentijd hebben we ook de binnenkant van de cirkel gelakt, zodat de wieltjes beter grip
hebben en hebben we 4 latjes op de ronddraaiende plaat gelijmd, waar het dak van perspex
uiteindelijk tussen gezet wordt.
Daarna is Raimond verder gegaan met de schakeling om ervoor te zorgen dat de motor alleen
draait als hij moet draaien, maar op een gegeven moment draaide hij helemaal niet meer!
Raimond heeft alles nagekeken, maar kon het probleem niet vinden. Aan het eind van de dag,
na niks opgeschoten te zijn met de constructie, bleek dat de batterijen leeg waren! Wat een
verschrikkelijke blunder! Weer een middag verspeeld!
In de drie dagen daarna heeft Raimond het voor elkaar gekregen om de hele schakeling te laten
werken. Het probleem was dat de weerstanden om de opamps heen (de stuurweerstanden)
nog steeds te laag waren, waardoor de brugschakeling nog steeds veel te veel werd belast.
Daarom moesten er niet weerstanden van 10 kΩ maar van 100 kΩ als stuurweerstanden
tussen. Ook was het probleem dat de uitgangsspanning van de opamps niet hoog genoeg werd
om de motor IC duidelijke signalen te geven. Raimonds opa kwam met een andere schakeling
23
rond de opamps: geen negatieve maar positieve terugkoppeling van de uitgangsspanning.
Daardoor springt de uitgangsspanning direct van hoog naar laag of andersom. Hierdoor krijg je
ook niet een te zwakke hoge spanning. Ook kun je met deze schakelingen – de zogeheten
Schmitt Triggers – een vertraging maken in het omspringen waardoor je de motor in een
bepaald interval niet laat draaien. Dat is precies wat we nodig hadden! Na nog drie keer naar
Hobbyrama te zijn geweest om steeds twee of drie componentjes te kopen, heeft Raimond de
laatste dingen op de printplaat gezet. En warempel: hij deed het!!!
De laatste zondagmiddag hebben we de laatste hand gelegd aan de schakeling door de twee
printplaten met elkaar te verbinden en hebben we de hele constructie afgemaakt. Ook hebben
we het verslag afgemaakt. Ons profielwerkstuk is eindelijk af en werkt!
24
Conclusie
Eigenlijk was dit project te hoog gegrepen voor onze kennis. Wij wisten heel weinig van
elektronica en die kennis was essentieel om dit profielwerkstuk te maken. Ook onze begeleider
beschikte niet over deze kennis en twee personen die hier wel kennis van hebben wonen te ver
weg om echt goed te helpen, want via telefoon of andere vormen van communicatie is erg
lastig.
Ook merk je duidelijk dat we veel gebrek aan ervaring hadden over hoe we zo’n soort project
moeten uitvoeren. Kleine projecten zoals Praktische Opdrachten hebben we wel ervaring mee,
maar een project waarbij we echt zelf van alles moeten uitzoeken en uiteindelijk een product
moeten afleveren hebben we hiervoor nog nooit gehad.
We hebben er wel heel veel van geleerd. Hoe we componenten moeten plaatsen, je moet met
een gedegen plan aan de slag gaan, voor elektronica is een speciale soldeerbout nodig. Dit zijn
allemaal belangrijke leermomenten.
Uiteindelijk is het ons gelukt om een werkende zonnevolger te maken. We hebben er heel veel
tijd in gestoken, maar hij werkt!
25
Bronvermelding
Boeken:
Dam, G.H.K.; 2003; 308 schakelingen elektuur; Beek; Segment
Internet:
www.natuurkunde.nl
www.stappenmotor.nl
www.wikipedia.nl
www.philips.nl
www.google.nl
www.conrad.nl
www.nanotec.com
www.fortisbank.nl
www.hobby-rama.nl
www.reuk.co.uk/Solar-iPod-Charger.htm
www.kpsec.freeuk.com/555timer.htm
home.cogeco.ca/~rpaisley4/LM555.html
Databladen:
LM317:
LM741:
LM555:
IMT 901:
www.fairchildsemi.com/ds/LM%2FLM317.pdf
www.ee.nmt.edu/~thomas/data_sheets/LM741.pdf
web.mit.edu/6.s28/www/datasheets/LM555.pdf
en.nanotec.com/downloads/pdf/1067/imt901_en%5B1%5D.pdf
Programma:
Crocodile Technology
26
Logboek
Logboek Lisette
Datum
Tijd
Plaats
30-05-07 15 min.
school
01-06-07 1 uur
school
13-06-07 1 uur
school
14-06-07 1 uur
school
14-06-07 2 uur
thuis
15-06-07 20 min.
school
19-06-07 1 uur
school
22-06-07 5 min.
06-09-07 1 uur
school
school
07-09-07 2 uur
werk
12-09-07
19-09-07
24-09-07
25-09-07
03-10-07
school
school
thuis
school
thuis
1 uur
1 uur
1 uur
20 min.
30 min.
12-12-07 2 uur
school
12-12-07 30 min.
school
30-12-07 1 uur
thuis
Verrichte
werkzaamheden
handleiding
profielwerkstuk is
uitgedeeld
gezocht naar
onderwerp
gezocht naar
onderwerp
gezocht naar
onderwerp
informatie over
onderwerp gezocht
begeleiding gevraagd
aan Dhr. Berendsen
hoofdvraag en
deelvragen bedacht
fase 1 ingeleverd
deelvragen verbeterd
informatie gezocht over
stappenmotor
plan van aanpak
plan van aanpak
fase 2 uitgewerkt
fase 2 doorgenomen
voorlopig logboek
uitgewerkt
informatie over motors
gezocht
deelvragen
doorgenomen
Opmerkingen
Afspraken
Nog niet
gevonden
Nog niet
gevonden
Gevonden
We vonden de
deelvragen niet
goed
geformuleerd.
Klaar
Genoeg
gevonden
6 januari de
deel vragen
af, daarna
beginnen met
bouwen!
Informatie over motors
27
06-01-08 2 uur
06-01-08 3 uur
06-01-08 2 uur
thuis
thuis
thuis
08-01-08 3 uur
17-01-08 1 uur
school
school
uitgezocht en relevantie
bepaald
deelvraag 3 gemaakt
deelvraag 4 gemaakt
deelvraag 1 begonnen
Ik kom er niet
uit, later overleg
met Raimond
deelvraag 1 gemaakt
bestellen conrad
05-02-08 1 uur
school
bestellen conrad
05-02-08
12-02-08
13-02-08
14-02-08
28-02-08
02-03-08
16-03-08
21-03-08
24-03-08
30-03-08
01-04-08
03-04-08
school
school
school
school
bij Raimond
bij Raimond
bij Raimond
bij Raimond
bij Raimond
bij Raimond
bij Raimond
bij Raimond
bestellen Nanotec
start bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
constructie zonnevolger
solderen en verslag
solderen, constructie en
verslag
constructie
assembleren, verslag
afmaken
1 uur
2 uur
2 uur
1 uur
7 uur
7 uur
5 uur
3,5 uur
7 uur
7 uur
9 uur
8 uur
06-04-08 6 uur
Totaal
bij Raimond
nog een keer
bestellen
binnenkort
stappenmotor
bestellen
start bouwen
94,5
uur
28
Logboek Raimond
Datum
Tijd
Plaats
30-05-07 15 min.
school
01-06-07 1 uur
school
13-06-07 1 uur
school
14-06-07 1 uur
school
14-06-07 2 uur
thuis
15-06-07 20 min.
school
19-06-07 1 uur
school
22-06-07 5 min.
06-09-07 1 uur
school
school
12-09-07
19-09-07
25-09-07
10-12-07
1 uur
1 uur
20 min.
1 uur
school
school
school
thuis
17-12-07
22-12-07
28-12-07
08-01-08
30 min.
2 uur
2 uur
3 uur
school
thuis
bij opa
school
Verrichte
werkzaamheden
handleiding
profielwerkstuk is
uitgedeeld
gezocht naar
onderwerp
gezocht naar
onderwerp
gezocht naar
onderwerp
informatie over
onderwerp gezocht
begeleiding gevraagd
aan Dhr. Berendsen
hoofdvraag en
deelvragen bedacht
fase 1 ingeleverd
deelvragen verbeterd
16-01-08 1 uur
Thuis
17-01-08 1 uur
school
plan van aanpak
plan van aanpak
fase 2 doorgenomen
begin ontwerp
schakeling
ontwerp schakeling
ontwerp schakeling
Ontwerp schakeling
Lisette geholpen met
deelvraag 1
lijst benodigdheden
samenstellen
bestellen conrad
05-02-08 1 uur
school
bestellen conrad
05-02-08 1 uur
12-02-08 2 uur
13-02-08 2 uur
school
school
school
bestellen Nanotec
start bouw schakeling
bouw schakeling
Opmerkingen
Afspraken
Nog niet
gevonden
Nog niet
gevonden
Gevonden
We vonden de
deelvragen niet
goed
geformuleerd.
Klaar
nog een keer
bestellen
binnenkort
stappenmotor
bestellen
start bouwen
29
14-02-08
28-02-08
02-03-08
16-03-08
21-03-08
24-03-08
24-03-08
25-03-08
28-03-08
30-03-08
01-04-08
02-04-08
1 uur
7 uur
7 uur
5 uur
3,5 uur
7 uur
2 uur
2 uur
2 uur
7 uur
9 uur
1 uur
school
thuis
thuis
thuis
thuis
thuis
thuis
thuis
thuis
thuis
thuis
school
02-04-08 6 uur
thuis
03-04-08 8 uur
thuis
05-04-08 4 uur
thuis
06-04-08 6 uur
thuis
Totaal
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
bouw schakeling
doormeten lader
doormeten lader
bouw nieuwe lader
constructie zonnevolger
solderen
ontwerp nieuwe
schakeling
doormeten en overleg
met opa
solderen, constructie,
verslag
doormeten en laatste
onderdelen solderen
solderen, constructie
assembleren, verslag
afmaken
101 uur
30
Bijlagen
Plan van aanpak
Hoofdvraag:
Deelvragen:
Hoe maak je een zonnevolger?
1. Hoe kun je de positie van de zon bepalen?
2. Hoe kun je elektronisch het sterkste lichtpunt volgen?
3. Welke eisen stellen wij aan onze zonnevolger?
4. Welke motor is geschikt voor de zonnevolger?
5. Welke onderdelen hebben we nodig?
6. Hoe gaat de zonnevolger eruit zien?
Hypothesen en verwachtingen:
1. Als we hebben uitgezocht welke manier er zijn om de positie van de
zon te bepalen, zoals door middel van tijdalgoritmen en het sterkste
lichtpunt volgen, dan kunnen wij bepalen wat voor onze zonnevolger
de beste manier is.
2. Als we hebben bepaald hoe je elektronisch het sterkste lichtpunt kan
volgen, bijvoorbeeld met behulp van LDR’s, fotodiodes en
signaalverwerking, dan kunnen we met deze gegeven beslissen wat
we gaan gebruiken voor de zonnevolger.
3. Als we precies weten welke eisen we stellen aan de zonnevolger, dan
is het makkelijker om uit te zoeken wat we dan nodig hebben.
4. Als we weten welke motor we nodig hebben, bijvoorbeeld een
servomotor, een stappenmotor of een elektromotor, dan kunnen we
er een gebruiken voor de zonnevolger.
5. Als we weten welke onderdelen we nodig hebben, dan kunnen we
deze onderdelen kopen en het ontwerp voor de zonnevolger maken.
6. Als we een ontwerp van de zonnevolger hebben gemaakt, dan is het
voor ons makkelijker om de zonnevolger te bouwen en een tijdsplan
te maken hoe lang het bouwen gaat duren.
Werkwijze:
Wij willen eerst de theorie uitwerken. Dit doen wij door middel van
informatie verzamelen, uitzoeken wat relevant is en daarmee de
deelvragen beantwoorden.
Hierna willen wij het ontwerp van de zonnevolger maken en het ontwerp
uiteindelijk in elkaar gaan zetten. Dit doen wij omdat wij niet afhankelijk
willen zijn van de datum wanneer het laboratorium op school klaar is.
31
Informatiebronnen en hulpmiddelen:
- Technische Universiteiten
- Internet
o www.natuurkunde.nl
o www.stappenmotor.nl
o www.wikipedia.nl
o www.philips.nl
o www.google.nl
- Boeken
o 308 schakelingen
- Docent
o Dhr. S. Berendsen
- CoachLab / IP-Coach
- Opa van Raimond
Presentatievorm:
Wij hebben gekozen voor “het product van een ontwerpopdracht plus
een schriftelijke toelichting”
Taakverdeling/Tijdsplan
Taak
Onderwerp uitzoeken
Hoofdvragen en deelvragen
bedenken
Plan van aanpak samenstellen
Plan van aanpak uitwerken
Fase 2 afronden
Deelvraag 1
Deelvraag 2
Deelvraag 3
Deelvraag 4
Deelvraag 5
Deelvraag 6
Start bouw zonnevolger
Fase 3 afronden
Presentatie voorbereiden
Fase 4 afronden
Wie
Lisette en
Raimond
Lisette en
Raimond
Lisette en
Raimond
Lisette
Lisette en
Raimond
Lisette
Raimond
Lisette
Lisette
Raimond
Raimond
Lisette en
Raimond
Lisette en
Raimond
Lisette en
Raimond
Lisette en
Raimond
Startdatum
1 juni 2007
Tijdsduur
3 uur
11 juni 2007
3 uur
6 september 2007
3 uur
19 september 2007
1 oktober 2007
2 uur
2 uur
19 september 2007
22 oktober 2007
19 september 2007
22 oktober 2007
begin november 2007
half november 2007
begin december 2007
8 uur
10 uur
3 uur
5 uur
3 uur
8 uur
26 uur
21 januari 2008
3 uur
22 februari 2008
4 uur
18 februari 2008
3 uur
32
Schakeling
33
Tekening printplaat
34
35
Constructie
De onderste zwarte rand en de twee blokjes aan de zijkanten er boven zijn houten platen. De onderste
plaat is de grondplaat, bij de twee platen erboven is er een cirkel uitgezaagd. Deze drie platen zijn aan
elkaar vast gelijmd.
De rode balkjes zijn wieltjes. Drie wieltjes staan op de onderste plaat, maar één wieltje is gekanteld en
aan de as van de stappenmotor (groen) gemonteerd. Dit wiel is tegen de zijkant van de platen met de
uitgezaagde cirkel geplaatst, waardoor de (hier oranje) plaat die erboven ligt, ronddraait.
De bruine balk is een bak waar de printplaat met de schakeling in zit. Er komen een aantal draden uit
naar de motor, de fotoweerstanden en de zonnecellen lopen. De fotoweerstanden zijn de blauwe
vierkantjes. Een zit tussen de ronddraaiende plaat en de zwarte verdieping in, deze is voor ‘achter’, dus
voor de eerste situatie die genoemd is in het hoofdstuk ‘De elektronica’ onder het kopje ‘Meetsysteem’.
De andere twee fotoweerstanden voor het naar links en rechts draaien zitten boven de zwarte
verdieping en van elkaar gescheiden door een zwart houten plaatje. Het dak is gemaakt van perspex,
zodat de hele schakeling en constructie niet nat wordt. Op de rechter zijkant, zitten onder de
fotoweerstanden aan de buitenkant de zonnepanelen.
36
Foto’s
Het prille begin
Het begin toch al een puinhoop
te worden....
De puinhoop
Bezig met de constructie
De 'zolder'
De nieuwe printplaat
De nieuwe gesoldeerde
printplaat
De draaiende plaat en het
onderstel
37
De gehele constructie
Alles erop en eraan: hij is af!!!
38