Oplossen van passieve en actieve neurofysiologische
vergelijkingen met toepassingen in hersenstimulatie
Jan Mertens
Promotoren: prof. dr. ir. Luc Dupré, dr. ir. Guillaume Crevecoeur
Begeleider: Nele De Geeter
Masterproef ingediend tot het behalen van de academische graad van
Master in de ingenieurswetenschappen: biomedische ingenieurstechnieken
Vakgroep Elektrische energie, Systemen en Automatisering
Voorzitter: prof. dr. ir. Jan Melkebeek
Faculteit Ingenieurswetenschappen en Architectuur
Academiejaar 2011-2012
De auteur geeft de toelating deze masterproef voor consultatie beschikbaar te stellen en delen van de masterproef te kopiëren voor persoonlijk gebruik. Elk ander gebruik valt onder
de beperkingen van het auteursrecht, in het bijzonder met betrekking tot de verplichting
de bron uitdrukkelijk te vermelden bij het aanhalen van resultaten uit deze masterproef.
The author gives the authorization to consult and to copy parts of this work for personal
use only. Any other use is limited by the Laws of Copyright. Permission to reproduce any
material contained in this work should be obtained from the author.
Gent, 9 januari 2012
De auteur
Jan Frederik Mertens
Voorwoord
Dit werk is gepaard gegaan met veel werk, niet alleen door mij, maar ook door de mensen
die mij ondersteund hebben. Hierbij wil ik deze mensen dan ook hartelijk bedanken.
Om te beginnen zou ik graag mijn promotoren dr. ir. Guillaume Crevecoeur en prof. dr.
ir. Luc Dupré en mijn begeleidster ir. Nele De Geeter danken voor de productieve en
aangename samenwerking.
Voor de voorbije jaren bedank ik ook mijn ouders, die mij de kans hebben gegeven om
deze studie aan te vangen, mijn studiegenoten waarop ik steeds kon terugvallen indien ik
vragen had, en mijn vrienden bij wie ik steeds terecht kon voor morele steun.
Bedankt.
iii
Overzicht
Oplossen van passieve en actieve neurofysiologische vergelijkingen met toepassingen in
hersenstimulatie
Auteur: Jan Mertens
Promotoren: prof. dr. ir. Luc Dupré, dr. ir. Guillaume Crevecoeur
Begeleidster: Nele De Geeter
Masterproef ingediend tot het behalen van de academische graad van Master in de ingenieurswetenschappen: biomedische ingenieurstechnieken, Vakgroep Elektrische energie,
Systemen en Automatisering, Voorzitter: prof. dr. ir. Jan Melkebeek, Faculteit Ingenieurswetenschappen en Architectuur, Academiejaar 2011-2012
Er is steeds meer nood aan technieken die het neurofysiologische gedrag van patiënten kan
wijzigen of herstellen zonder zware chirurgische ingrepen te handhaven. Waar men vroeger
drastische maatregelen nam, zoals een lobotomie, gaat men nu trachten de problemen op
te lossen met een minimale last voor de patiënt. Zo kan men het gedrag van bepaalde
neuronen beı̈nvloeden met behulp van elektrische velden. Deze velden zijn afkomstig van
een spoel, gesitueerd nabij het hoofd van de patiënt.
Binnen dit eindwerk worden modellen gemaakt van neuronen, waarop dit elektrische veld
inwerkt. Er wordt onderzocht hoe deze neuronen zich gedragen onder deze stimulatie
en wat de verschillende invloeden zijn van bepaalde parameters van het model. De modellen worden met elkaar vergeleken en bepaalde stimulatiepatronen worden onderzocht
om tot het gewenste neurale gedrag te komen. Dit gewenste gedrag zal afhangen van de
aandoening waaraan de patiënt leidt.
Kernwoorden: membraanpotentiaal, depolarisatie, hyperpolarisatie, actiepotentiaal, elektrisch veld, elektromagnetisme, neurofysiologie.
iv
Solving the passive and active neurophysiological
equations with applications in brain stimulation
Jan Mertens
Supervisor(s): L. Dupré, G. Crevecoeur and N. De Geeter
Abstract— More and more patients expect to be treated from their affliction with minimal risk and maximum comfort. Currently neurophysiological conditions can be treated with implantation of a DBS device, but
this requires an intensive operation and the effect is not totally known. A
solution is TMS, where a coil near the head produces an electric field that
excites certain parts of the brain.
This thesis focuses on the influence of an electric field on neuron bundles in the head. The effects of the electric field and the influences of the
different physiological parameters are studied and it is determined when
and under what conditions neurons can be hyperpolarized or depolarized.
Different stimulation types are brought into consideration. With longer
stimulation, hyperpolarizations can be induced to stop the conduction of
action potentials. This can be a desired or undesired, depending on what
type of neural behavior you want to excite. Iterations are possible in the
active model when a periodic stimulation is used. However the refractory
period has to be incorporated in these calculations to insure the membrane
channels are not inactive.
TABLE I
VALUES OF THE USED PARAMETERS FOR THE PASSIVE MODEL .
membrane resistance
membrane capacitance
axial resistance
radius
REATMENTS of neurophysiological conditions are often
extreme and not very effective. Because of the highly complex nature of the brain, patients have to undergo very complex surgical procedures, like inplanting a deep brain stimulator(DBS) device to stimulate certain parts of the brain. This
technique is often used with patients who suffer from Parkinson’s disease, where certain motor neurons have become too
sensitive that the patient has difficulty controlling the motor
movements of the body. In DBS, electrodes are placed in the
brain, which inject a current to hyperpolarize certain neurons,
making them less sensitive. Besides injected currents also applied electric fields can be used to stimulate parts of the brain[1].
These electric fields can originate from a coil outside the brain,
which does not need intensive brain surgery to induce a change
in the membrane potential of the neurons.
The system of generating an electric field in the brain is called
transcranial magnetic stimulation(TMS). In order to fully understand the influence of this electric field, models of neurons have
to be made, and the influence of the stimulus has to be determined. In these models, several parameters will be varied to examine the behavior of the membrane potential while stimulated
by an electric field.
T
II. T HE PASSIVE MODEL
In the passive model, we assume that the membrane parameters are uniform and independent of the membrane potential.
J. Mertens is with the Electric energy, Systems and Automatisation Department, Ghent University (UGent), Gent, Belgium.
E-mail:
[email protected] .
Unit
Ωm2
F/m2
Ωm
m
Value
23
0.009
0.354
5·10−6
Further assumptions are that the extracellular resistance is neglectable and the resting potential is zero. Using the model in
Fig 1 we find the so-called cable equation[2]:
Keywords— membrane potential, hyperpolarizaton, depolarization, action potential, electric field, neurophysiology
I. I NTRODUCTION
Parameter
Rm
Cm
Ra
a
∂Vm
∂Ex
∂ 2 Vm
= τm ·
+ Vm + λ2
(1)
2
∂x
∂t
∂x
q
and τ = rm cm
the membrane potential, λ = rrm
a
λ2 ·
with Vm
the place and time constants and
∂Ex
∂x
the activation function.
Fig. 1. The passive cable model.
By solving this equation, using sealed end boundaries and parameters from Table I, we obtain the membrane potential of Fig
2.
We notice that the nerve is more depolarized or hyperpolarized at tissue boundaries. This is because tissue heterogeneity
introduces a bigger influence on the activation function, since
the electric field in the tissue depends on the material parameters[3]. We find that a higher membrane capacitance decreases
the membrane potential, and reduces the spread over the neuron. The membrane resistance has the adverse effect. This is
because the high membrane resistance is paired with high axial
currents. The axial resistance will influence the continuity of
the membrane potential along the nerve. A high axial resistance
means low axial current and high local membrane currents and
thus high local membrane potentials.
potential during the stimulation. After stimulation the potential
drops towards the resting potential with an undershoot. This behavior can be explained by the ionic channels for potassium and
sodium. The rise is due to a fast increased sodium permeability,
and the equilibrium is due to a slow increased potassium permeability. The potassium channel closes so slowly, that it hasn’t
fully closed yet
Fig. 2. The membrane potential(V) under an electric field for the passive model.
TABLE II
VALUES OF THE USED PARAMETERS FOR THE ACTIVE MODEL .
membrane capacitance
membrane resistance
radius
sodium conductance
potassium conductance
leakage conductance
sodium nernst potential
potassium nernst potential
leakage nernst potential
resting potential
Parameter
Cm
Ra
a
gN a
gK
gL
EN a
EK
EL
Vrest
Unit
µF/cm2
Ωcm
cm
S/cm2
S/cm2
S/cm2
mV
mV
mV
mV
Value
0.001
35.4
5 · 10−4
0.12
0.036
0.0003
50
-77
-54.387
-65
Fig. 3. The membrane potential for a sustained stimulation of 7.5 ms of the
active model with an electric field.
In periodic stimulation we find the same pattern for the passive model, but with up and down variations. In the active
model, one period of the stimulation can be enough to generate an action potential. If we want a periodic series of action
potentials we have to take into consideration the refractory periods.
III. T HE ACTIVE MODEL
V. C ONCLUSIONS
In the active model we use the experimental equations, defined by Hodgkin and Huxley[4]. Certain membrane properties
have to be included in the passive model. The membrane resistance in Fig 1 is replaced by a parallel circuit of 3 voltage resistance series. Each series represents a type of ionic channel on the neural membrane: the potassium channel, the sodium
channel and a leak channel. There is a voltage source which
represents the voltage equilibrium and a resistance which represents the permeability of the channel. By solving these equations[4],using the same electric field as for the passive model
and the parameters from Table II, we find that the field will induce action potentials on some locations along the nerve. Again,
places with higher tissue heterogeneity have a higher chance of
creating an action potential, or blocking one. By increasing the
membrane capacitance, we see the action potential needs more
time to establish itself. This time also depends on the tissue
where the neuron is located. We find that the conduction speed
of the action potential increases when the axial resistance is decreased or the radius of the fiber is increased.
We have seen that the membrane potential in both models react to an applied electric field. The passive model only works if
the membrane potential is below the threshold potential, which
is the limit when no action potential is generated and the activities of the membrane channels are absent. The creation of the
action potential, the time when it is generated, and its conduction speed depend on the parameters of the model, the membrane capacitance, the radius and the axial resistance.
Different stimulation techniques with the electric field have
been studied. When stimulation is used over a longer period of
time, it is important to realize the existence of hyperpolarized
zones. These zones can block the conduction of an action potential and inactivate the neuron. If we want to create several
action potentials on a periodic base, the refractory period has to
be calculated using the parameters of the model. This period
can then be translated to the frequency of rTMS to produce the
periodic electric field.
IV. D IFFERENT APPLICATIONS OF THE ELECTRIC FIELD
We apply different types of electric field stimuli on both models, starting with changing the duration of the stimulus. The passive model shows an exponential rise and decline pattern. The
stimulus duration determines how long this rise lasts. The active model follows the same pattern, but after about 4 ms, the
membrane potential starts to drop towards a new equilibrium
R EFERENCES
[1] B.J.Roth and P.J.Basser, A model of the stimulation of a nerve fiber by
electromagnetic induction, IEEE Trans. Biomed. Eng.,37:588-597, 1990.
[2] J. Ruohonen et al.,
Transverse-field activation mechanism in magnetic stimulation of peripheral nerves,
Electroencephalogr. Clin.
Neurophysiol.,101:167-174, 1996.
[3] P.C.Miranda et al., Tissue heterogeneity as a mechanism for localized neural
stimulation by applied electric fields, Phys. Med. Biol.,52:5603-5617, 2007.
[4] A.L.Hodgkin and A.F.Huxley, A quantitative description of membrane current and its application to conduction and excitation in nerve, J. Physiol.
Biochem., 117:500-544, 1952.
[5] R.H.S. Carpenter, Neurophysiology, Arnold, 2003.
Inhoudsopgave
Voorwoord
iv
Overzicht
v
Extended abstract
vi
Lijst van afkortingen en symbolen
xi
1 Algemene inleiding
1.1 Algemeen . . . .
1.2 Probleemstelling
1.3 Doelstelling . . .
1.4 Overzicht van het
. . . . . .
. . . . . .
. . . . . .
eindwerk
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Theoretische achtergrond
2.1 Inleiding . . . . . . . . . . . . . . . . . . .
2.2 Het brein . . . . . . . . . . . . . . . . . .
2.2.1 Inleiding . . . . . . . . . . . . . . .
2.2.2 Anatomie van het brein . . . . . .
2.2.3 Hersenvliezen . . . . . . . . . . . .
2.2.4 Spinale vloeistof . . . . . . . . . .
2.3 Het neuron . . . . . . . . . . . . . . . . .
2.3.1 Inleiding . . . . . . . . . . . . . . .
2.3.2 Anatomie van het neuron . . . . .
2.3.3 Werking van het neuron . . . . . .
2.4 TMS . . . . . . . . . . . . . . . . . . . . .
2.4.1 Inleiding . . . . . . . . . . . . . . .
2.4.2 De spoel . . . . . . . . . . . . . . .
2.4.3 Generatie van het elektrische veld
2.5 Simulatiemodellen . . . . . . . . . . . . .
2.5.1 Inleiding . . . . . . . . . . . . . . .
2.5.2 Het passieve model . . . . . . . . .
2.5.3 Het actieve model . . . . . . . . .
2.6 Uitbreidingen van het simulatiemodel . .
2.6.1 Inleiding . . . . . . . . . . . . . . .
vii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
1
2
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
7
7
8
11
12
12
12
13
13
14
14
14
15
16
16
17
18
19
19
viii
Inhoudsopgave
2.6.2
2.6.3
2.6.4
2.6.5
De myeline laag . . . . . . . . . . . . . . . . . . . . . .
Het effect van omringende geleiders . . . . . . . . . . .
Invloed van het transverse deel van de activatiefunctie
Het effect van weefsel heterogeniteit . . . . . . . . . .
3 Het passieve model
3.1 Inleiding . . . . . . . . . . . . . . . . . . . . . .
3.2 Het hoofdmodel . . . . . . . . . . . . . . . . . .
3.2.1 Inleiding . . . . . . . . . . . . . . . . . .
3.2.2 Een standaard model . . . . . . . . . . .
3.2.3 Het elektrische veld . . . . . . . . . . .
3.3 De neuronenbundel . . . . . . . . . . . . . . . .
3.4 Oplossingen van de analytische methode . . . .
3.4.1 De isopotentiaal methode . . . . . . . .
3.4.2 De ’steady state’ oplossing . . . . . . . .
3.4.3 Impulsresponsie . . . . . . . . . . . . . .
3.5 Oplossingen van de numerieke methode . . . .
3.6 Vergelijking met de analytische methode . . . .
3.6.1 De isopotentiaal methode . . . . . . . .
3.6.2 De ’steady state’ methode . . . . . . . .
3.6.3 De impulsresponsie methode . . . . . .
3.7 Vergelijking met de simulatie-omgeving neuron
3.7.1 Introductie tot neuron . . . . . . . . . .
3.7.2 Locale stroominput . . . . . . . . . . . .
3.7.3 Continue stroominput . . . . . . . . . .
3.8 Invloed van de parameters van het model . . .
3.8.1 Inleiding . . . . . . . . . . . . . . . . . .
3.8.2 De ruimtehoeken α en θ . . . . . . . . .
3.8.3 De membraanweerstand en capaciteit .
3.8.4 De axiale weerstand . . . . . . . . . . .
3.8.5 De straal . . . . . . . . . . . . . . . . .
3.9 Uitbreidingen van het model . . . . . . . . . . .
3.9.1 De aanwezigheid van myeline . . . . . .
3.9.2 Het effect van een bocht . . . . . . . . .
3.9.3 Invloed op andere zenuwbundels . . . .
4 Het
4.1
4.2
4.3
actieve model
Inleiding . . . . . . . . . . . . . . . .
De generatie van actiepotentialen . .
Eigenschappen van actiepotentialen .
4.3.1 De drempelspanning . . . . .
4.3.2 De refractaire periode . . . .
4.3.3 Accomodatie . . . . . . . . .
4.3.4 De ’all-or-nothing’ wet . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
22
23
23
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
25
25
25
25
26
27
31
31
32
32
34
40
40
40
40
40
40
42
42
45
45
45
46
47
48
48
48
49
51
.
.
.
.
.
.
.
54
54
54
57
57
58
58
59
ix
Inhoudsopgave
4.4
4.5
4.6
4.7
4.8
4.9
De vergelijkingen van Hodgkin en Huxley . . .
De numerieke oplossingen . . . . . . . . . . . .
Vergelijking met de simulatie-omgeving neuron
4.6.1 Lokale stroominput . . . . . . . . . . . .
4.6.2 Continue stroominput . . . . . . . . . .
Eigenschappen van het actieve model . . . . . .
4.7.1 De drempelspanning . . . . . . . . . . .
4.7.2 De ’all-or-nothing’ wet . . . . . . . . . .
4.7.3 Accomodatie . . . . . . . . . . . . . . .
4.7.4 De refractaire periode . . . . . . . . . .
Invloed van de parameters van het model . . .
4.8.1 Inleiding . . . . . . . . . . . . . . . . . .
4.8.2 De membraancapaciteit . . . . . . . . .
4.8.3 De axiale weerstand . . . . . . . . . . .
4.8.4 De straal . . . . . . . . . . . . . . . . .
Uitbreidingen van het model . . . . . . . . . . .
4.9.1 De aanwezigheid van myeline . . . . . .
4.9.2 Het effect van een bocht . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5 Een vergelijkende studie tussen het passieve en het actieve model
5.1 Inleiding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 De duur van de stimulatie . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Het gedrag onder de drempelspanning . . . . . . . . . . . . . .
5.2.2 Het gedrag boven de drempelspanning . . . . . . . . . . . . . .
5.3 Periodieke stimulatie . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Het gedrag onder de drempelspanning . . . . . . . . . . . . . .
5.3.2 Het gedrag boven de drempelspanning . . . . . . . . . . . . . .
5.4 Toepassingen van het elektrische veld . . . . . . . . . . . . . . . . . . .
5.4.1 De duur van de stimulatie . . . . . . . . . . . . . . . . . . . . .
5.4.2 Periodieke stimulatie . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
59
61
62
62
65
66
66
66
67
68
69
69
69
70
71
71
71
71
.
.
.
.
.
.
.
.
.
.
74
74
74
74
76
76
76
78
78
78
81
6 Conclusie
85
A Handleiding voor de code
88
B Code van Neuron
94
B.1 Code voor het passieve model . . . . . . . . . . . . . . . . . . . . . . . . . . 94
B.2 Code voor het actieve model . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
B.3 Code om data van matlab in te lezen . . . . . . . . . . . . . . . . . . . . . . 95
Bibliografie
96
Lijst van afkortingen en symbolen
AP =actiepotentiaal
CZS =centraal zenuwstelsel
DBS =’deep brain stimulator’
DTI =’diffusion tensor imaging’
EEG =’elektro-encefalogram’
PZS =perifeer zenuwstelsel
rTMS =repetitieve transcraniële magnetische stimulatie
TENS =’transcutaneous electric nerve stimulation’
TMS =transcraniële magnetische stimulatie
x
Hoofdstuk 0. Lijst van afkortingen en symbolen
α = de hoek van de neuronenbundel met de x-as in het XY-vlak
= de permittiviteit van een materiaal
θ = de hoek van de neuronenbundel met de z-as
µ0 = de absolute permeabiliteit
σ = de conductiviteit van een materiaal
ω = de hoeksnelheid
a =de straal van de neuronenbundel [m]
B =het magnetische veld
Cm = de specifieke capaciteit van de condensator[F/m2 ]
E =het elektrische veld
EK = de evenwichtspotentiaal van kalium[V ]
EL = de evenwichtspotentiaal van lekkanalen[V ]
EN a = de evenwichtspotentiaal van natrium[V ]
f =de frequentie[Hz]
gK = een constante voor de conductiviteit van een kaliumkanaal[siemens/cm2 ]
gL = een constante voor de conductiviteit van een lekkanaal[siemens/cm2 ]
gN a = een constante voor de conductiviteit van een natriumkanaal[siemens/cm2 ]
i =de stroom[A]
j =de imaginaire eenheid
jcoil = de stroomdichtheid doorheen de spoel
l =de verplaatsing langs een neuron[m]
L =de lengte van een neuron[m]
Rm = de specifieke membraanweerstand[Ωm2 ]
t =de tijd [s]
Tmax = de tijd van het experiment[s]
Vm = de membraanpotentiaal[V ]
Vrust = de rustpotentiaal[V ]
VT = de drempelspanning[V ]
x =de verplaatsing[m]
xi
Hoofdstuk 1
Algemene inleiding
1.1
Algemeen
Dit eindwerk gaat over het oplossen van de actieve en passieve neurofysiologische vergelijkingen met toepassingen in hersenstimulatie, maar wat wilt dit nu eigenlijk zeggen? Om
dit te verduidelijken geven we eerst een korte inleiding over de hersenen zelf, we beginnen
met een woordje uitleg over de fysiologische achtergrond en geven een algemene omkadering mee van het probleem. Vervolgens bekijken we dit project meer vanuit een technisch
standpunt en verklaren we de verschillende doelstellingen waaruit ook de unieke aspecten
van dit eindwerk tevoorschijn zullen komen. Ten slotte geven we een overzicht mee van
de komende hoofdstukken en van wat er nog allemaal besproken zal worden.
1.2
Probleemstelling
Het brein is een orgaan waarvan de werking tot op de dag van vandaag nog niet helemaal
gekend is. Vele eeuwen wordt er al onderzocht hoe wij aan onze overtuigingen en ideeën
komen. Het is pas vanaf het eind van de 19e eeuw dat we weten dat de hersenen bestaan uit
unitaire cellen genaamd neuronen[1]. Dit is dankzij het werk van Camillo Golgi en Santiago
Ramon y Cajal, waarvoor ze in 1906 de Nobelprijs in geneeskunde hebben gekregen. Toen
al dacht men dat de aard van communicatie binnen neuronen elektrisch was , maar het is
pas vanaf 1952, dankzij het werk van Alan Lloyd Hodgkin en Andrew Huxley[2], dat we
werkelijk begrijpen hoe deze elektrische communicatie tot stand komt. Een manier om deze
elektrische activiteit te meten is het gebruik van een EEG, of elektro-encefalogram, voor
het eerst toegepast op mensen in 1924 door Hans Berger[3]. Hiermee kan de elektrische
activiteit van alle neuronen in de hersenen gemeten worden in de vorm van waargenomen
spanningen via elektrodes aan het huidoppervlak. Deze EEG’s kunnen gebruikt worden
als hulpmiddel om de activiteit van de hersenen te onderzoeken. Een praktisch voorbeeld
ligt in het gebied van epileptische aanvallen, waar het analyseren van EEG’s van een
patiënt, die een epileptische aanval krijgt, kan leiden tot hulpmiddelen die deze aanvallen
beter kunnen voorspellen. Indien meerdere elektrodes gebruikt worden kan ook de plaats
1
Hoofdstuk 1. Algemene inleiding
2
waar de aanval plaatsvindt beter gelokaliseerd worden. Een ander voorbeeld is de studie
van EEG’s bij patiënten die leiden aan een psychotische aandoening, zoals schizofrenie
of depressie. De meetresultaten van gezonde mensen worden dan vergeleken met die
van de patiënten om bepaalde patronen in deze verschillen te vinden. Dit zijn allemaal
voorbeelden van hoe de elektrische activiteit, teweeggebracht door de fysiologie van de
hersenen, gemeten en geanalyseerd kan worden om tot een beter begrijpen van het brein
te komen. Men kan echter ook in de tegenovergestelde richting werken en een bepaalde
hersenactiviteit creëren door gebruik te maken van elektrische stimulatie.
De stimulatie zal dus een bepaalde hersenactiviteit teweegbrengen, maar wat betekent dit
nu eigenlijk in de praktijk? Zoals we in het volgende hoofdstuk gaan zien, wil elektrische
activiteit van het brein zeggen dat er een bepaalde elektrische stroom zal vloeien door de
neuronen. Het brein is een netwerk van deze neuronen die op elkaar kunnen inwerken als
excitator of inhibitor, wat wil zeggen dat sommige neuronen elkaar respectievelijk kunnen
activeren of versterken en inactiveren of verzwakken. Indien een bepaald neuron genoeg
geëxciteerd wordt kan het gecreëerde elektrische signaal getransporteerd worden doorheen
het brein of over het ruggenmerg om zo informatie naar de rest van het lichaam te voeren
, naar de spieren, organen, etc. Dit feedback systeem van exciteren en inhiberen is nodig
om tot een goedwerkend organisme te komen. Indien elk neuron bij de minste input van
een ander neuron onmiddellijk zelf signalen zou beginnen uitsturen zou er veel te veel
chaos en ruis zijn. Nu stuurt een neuron enkel een signaal uit indien er genoeg exciterende
signalen zijn en weinig inhiberende signalen, wat uiteindelijk ook de gevoeligheid van een
neuron bepaalt. Men kan dit zien aan de ziekte van Parkinson, een aandoening waar de
patiënt leidt aan motorstoornissen door een chronische ziekte aan de hersenen. Hier leidt
het afsterven van bepaalde gebieden in het brein tot minder inhiberende signalen in de
motorcortex waardoor de gevoeligheid van deze motorneuronen drastisch verhoogd wordt,
met motorstoornissen tot gevolg[4].
Via EEG’s kunnen we dus de activiteit van de hersenen onderzoeken, maar via de omgekeerde weg kunnen we ook bepaalde delen van het brein behandelen door zelf een elektrische activiteit te induceren. Indien we over genoeg informatie zouden beschikken over
de pathologie van een bepaalde ziekte en indien we in staat zouden zijn om een stroom of
spanning te induceren op een bepaalde locatie in de hersenen , zouden veel aandoeningen
beter behandeld kunnen worden. Het is dus belangrijk om eerst het grotere beeld te bekijken, hoe de neuronen zich gedragen ten opzichte van elkaar, welke functies ze hebben
en hoe ze precies reageren op extern aangelegde stimuli.
1.3
Doelstelling
Wat wilt dit nu allemaal concreet zeggen, gezien uit het standpunt van een ingenieur?
Het is nu al duidelijk dat het ons doel is om het gedrag van een neuron te beschrijven
onder invloed van externe stimulatie onder bepaalde toepassingen, omstandigheden en
randvoorwaarden. Normaal komt deze stimulatie van andere neuronen, of ontstaat een
initieel potentiaalverschil in de kern van het neuron zelf. Om dit gedrag nu correct te be-
Hoofdstuk 1. Algemene inleiding
3
schrijven zullen we een model aanmaken van het neuron en hier getallen en vergelijkingen
op plakken om vervolgens de stimulatie als input te gebruiken en te bepalen wat de uiteindelijke invloed zal zijn. Aangezien een brein bestaat uit miljarden neuronen, is het niet
nuttig om een model van één neuron te maken. Er komen wel veel gebundelde neuronen,
een zenuw genoemd, in de hersenen voor zoals de optische zenuw die visuele informatie
brengt van het oog naar de occipitale cortex achteraan het hoofd, of het corpus callosum,
een zenuwbundel dat beide hersenhelften met elkaar verbindt. In dit werk zullen we dus
een zenuw modelleren. Het is één van onze taken om een correct model te maken van
deze bundel en de juiste waarden te halen uit de literatuur zodat de realiteit voldoende
benaderd wordt.
We beginnen bij een zenuw zelf, hoe gaan we dit als een wiskundig model voorstellen en hoe
gaan we de elektrische activiteit meten? Algemeen gezien wordt de activiteit van een neuron gezien als de creatie van een membraanspanning langs het axon van dit neuron, wat de
uitloper is naar andere neuronen in de buurt. Elk neuron heeft een rustpotentiaal, een bepaalde potentiaalwaarde wanneer alle processen in rust zijn. Indien de membraanspanning
stijgt door stimulatie, dan spreken we van een depolarisatie. Indien de membraanspanning daalt, spreken we van een hyperpolarisatie. We gaan deze membraanspanning dus
berekenen, onder een bepaalde stimulatie, voor een bepaald model. De technische details
gaan volgen in de komende hoofdstukken, maar we kunnen wel al zeggen dat we twee
verschillende modellen van neuronen gaan bespreken, namelijk een actief en een passief
model. In beide gevallen zal het neuron voorgesteld worden door een elektrisch circuit
en afhankelijk van de vorm van de stimulus zal per model een stelsel van vergelijkingen
opgemaakt worden. Eerst gaan we deze modellen wiskundig formuleren om vervolgens een
stimulus aan te leggen waardoor we een hyperpolarisatie of een depolarisatie gaan krijgen
langs de neuronenbundel. Deze potentiaalveranderingen bekomen we door de neurofysiologische vergelijkingen op te lossen. We moeten ook bepalen hoe complex ons model zal
zijn. Moeten alle fysiologische eigenschappen van neuronen in rekening gebracht worden
bijvoorbeeld? Dit gaan we bepalen door middel van een literatuurstudie in hoofdstuk 2,
en door experimenten met ons model in hoofdstuk 3 en 4.
Waar komt de stimulus nu vandaan? Indien we zouden werken met een experimenteel
neuron dat beschikbaar en toegankelijk is, zouden we, zoals Hodgkin en Huxley gedaan
hebben[2], een stroom-of-spanningsklem kunnen gebruiken om respectievelijk een bepaalde
stroom of spanning in het neuron te induceren. Indien we echter een techniek willen gebruiken die ook voor concrete toepassingen bruikbaar is, moeten we andere methoden
hanteren. Een van de oplossingen is TMS, transcraniële magnetische stimulatie, waarbij
een spoel dichtbij het hoofd geplaatst wordt. Door deze spoel loopt vervolgens een stroom
waardoor een magnetisch veld gecreëerd wordt. Dit veld zal wervelstromen induceren
in het nabije hoofd van een patiënt, wat dan weer een elektrisch veld genereert in het
desbetreffende weefsel. Dit elektrische veld gaan we gebruiken als stimulus om de neurofysiologische vergelijkingen op te lossen. Uiteindelijk kan dit elektrische veld ook afkomstig
zijn van andere bronnen zoals DBS(’deep brain stimulation’) waarbij een reeks elektroden
ingeplant wordt in de buurt van een zenuwbundel in de hersenen. Aangezien we werken
Hoofdstuk 1. Algemene inleiding
4
met een elektrisch veld zal dit werk dus toepasbaar zijn voor elke toepassing waar een
elektrisch veld gegenereerd wordt in een zenuw.
Ons elektrisch veld is afkomstig van een spoel en afhankelijk van de weefselparameters
van het hoofd. Eén van de vragen is hoe we dit elektrische veld in de praktijk kunnen
berekenen, aangezien het zeer moeilijk zal zijn om dit veld invasief te meten in het hoofd
van een patiënt. Om dit op te lossen zullen we een hoofdmodel aanmaken, met bepaalde
weefseleigenschappen en geometrie die de realiteit voldoende benaderen. Het is ook belangrijk om een goed hoofdmodel op te stellen en te bepalen hoe complex dit model moet
zijn om tot de juiste waarden voor het elektrische veld te komen voor de toepassingen
in dit werk. Vervolgens moeten de neuronen gemodelleerd worden volgens een bepaalde
complexiteit. Indien we al deze waarden en parameters hebben, kunnen we overgaan tot
het opstellen en oplossen van de verschillende vergelijkingen. Indien we deze parameters
nu laten variëren over een bepaald interval zal blijken hoe de membraanpotentiaal zich
gedraagt onder invloed van deze veranderingen onder een opgelegd elektrisch veld. Dit
laatste stelt het unieke aspect voor van deze thesis. Een vergelijking tussen de actieve
en passieve benadering waarbij een elektrisch veld gebruikt wordt als input is een verder
uniek aspect en leidt ook tot meer inzicht tot de bepaling wanneer en in welke mate een
bepaald model gebruikt moet worden.
Waar leidt dit allemaal nu concreet naartoe en wat voor nut heeft het om dit allemaal
te onderzoeken? Als antwoord hierop vermelden we enkele praktische voorbeelden. Een
eerste voorbeeld is het behandelen van de ziekte van Parkinson via het gebruik van elektrische velden in het brein. De motorstoornissen kunnen in bepaalde mate behandeld worden
met medicijnen of via een operatie, waarbij ofwel bepaalde zenuwen vernietigd worden,
ofwel een DBS toestel geı̈mplanteerd wordt. Dit toestel zal dan via elektrodes elektrische
impulsen geven aan het deel van het brein waar het is geı̈mplanteerd, in dit geval aan het
deel dat instaat voor de controle van lichaamsdelen. Het implanteren van zo een toestel gebeurt normalerwijs in twee fases, eerst wordt via zeer fijne naalden de locatie gezocht waar
elektrische stimulatie kan leiden tot een betere controle van de lichaamsdelen, waarna de
DBS stimulator chirurgisch wordt geı̈mplanteerd[5]. Een eenvoudigere methode zou zijn
om via TMS de zenuw via elektrische velden te stimuleren. Verder is de directe invloed van
het elektrische veld, gecreëerd door DBS, nog niet helemaal bekend. Er is zeker een effect,
maar de vraag blijft of beter inzicht in deze materie niet kan leiden tot betere resultaten
voor de patiënt. Mogelijke vragen zijn dus hoe groot dit elektrische veld moet zijn, en wat
de exacte invloed gaat zijn op naburige zenuwbundels. Dit eindwerk zal hier meer inzicht
in trachten te verschaffen.
Een ander voorbeeld is tinnitus, dat nu al vaak behandeld wordt met TMS. Tinnitus is
het symptoom waarbij de patiënt oorsuizingen waarneemt in de afwezigheid van geluid.
Oorzaken kunnen gaan van infecties tot oorbeschadigingen door te luid lawaai. De pathologische aandoeningen die leiden tot tinnitus zijn nog niet helemaal bekend, maar huidig
onderzoek wijst er wel op dat sommige zenuwbundels aan de cortex, die instaan voor het
verwerken van de audio informatie, te gevoelig zijn[6]. Oplossingen worden dus gezocht
Hoofdstuk 1. Algemene inleiding
5
om deze gebieden in de hersenen te hyperpolariseren waardoor ze minder gevoelig worden.
Tinnitus kan behandeld worden met medicijnen, elektrische stimulatie, operaties, of via
antigeluid. Elektrische stimulatie is afkomstig van TENS(’transcutaneous electric nerve
stimulation’), waarbij er gestimuleerd wordt via een directe injectie van stroom, of via
het gebruik van TMS. Omdat we hier werken met een elektrisch veld als input gaan we
verder in op het gebruik van TMS. Aangezien tinnitus gepaard kan gaan met een depolarisatie van bepaalde zenuwen in de hersenen, zal TMS trachten deze zenuwen opnieuw
te hyperpolariseren. Dit werk kan meer inzicht geven waarom de zenuw, door bepaalde
aandoeningen aan de fysiologie, gedepolariseerd wordt en hoe de zenuw terug normaal kan
functioneren.
Een laatste toepassing die hier vermeld wordt is de behandeling van psychiatrische aandoeningen via het gebruik van TMS. Om deze technieken echter praktisch toepasbaar te
maken is het eerst nodig om bepaalde neuronale circuits te analyseren die leiden tot de
desbetreffende aandoeningen. Indien dit gebeurd is, kan via TMS bepaalde delen van dit
circuit gestimuleerd worden, wetende wat de invloed is van het elektrische veld op een
bepaalde set van neuronenbundels. Omdat dit allemaal niet invasief is, kunnen onderzoek
en behandelingen veel gemakkelijker verlopen.
1.4
Overzicht van het eindwerk
In hoofdstuk 2 overlopen we eerst de algemene theoretische achtergrond van wat we hier
al vermeld hebben. De anatomie van het neuron en de mechanismen achter het elektrische
transport worden ook bestudeerd, waaruit we vervolgens het wiskundige model kunnen
afleiden. De belangrijkste zenuwbundels in het brein worden kort besproken, alsook bepaalde geometrische structuren en lagen van de hersenen. Dit laatste is nodig om tot een
goed hoofdmodel te komen, waaruit we de waarden van het elektrische veld kunnen halen.
Er wordt kort gepraat over de spoel , en hoe het elektrische veld tot stand komt via de
wetten van Maxwell. Op het einde van dit hoofdstuk wordt het eerste model voorgesteld,
gevolgd door een literatuurstudie die zal aantonen waarom bepaalde veralgemeningen zijn
gemaakt. Deze studies gaan verder op de anatomie van het neuron en bepalen dus hoe en
waarom bepaalde fysiologische eigenschappen gemodelleerd worden of waarom bepaalde
eigenschappen juist genegeerd kunnen worden.
Hoofdstuk 3 handelt over het passieve model, en gaat verder op de wiskundige veronderstellingen van hoofdstuk 2. We zoeken verder naar een oplossing voor de vergelijkingen en
proberen deze te testen met bestaande analytische oplossingen en de simulatie-omgeving
Neuron, een programma gemaakt door de universiteit van Yale. Verder bekijken we ook
hoe de verschillende parameters de membraanspanning beı̈nvloeden. Op het einde van
dit hoofdstuk worden verdere uitbreidingen van het model besproken zoals het effect van
een geëxciteerde bundel op een naburige zenuwbundel en de invloed van een bocht op de
verdeling van de membraanpotentiaal.
Hoofdstuk 4 handelt over het actieve model en heeft een gelijkaardige indeling als hoofdstuk
Hoofdstuk 1. Algemene inleiding
6
3. We gaan zien dat de membraaneigenschappen wel afhankelijk zijn van de membraanpotentiaal en dat deze afhankelijkheid ook een invloed heeft op het al dan niet creëren
van een actiepotentiaal, een zeer sterk elektrisch signaal, gecreëerd voor communicatie op
langere afstanden. Opnieuw worden de oplossingen vergeleken met de simulatie-omgeving
Neuron. Ook hier wordt onderzocht hoe de verschillende parameters de werking van het
model beı̈nvloeden.
Na het bespreken van deze twee modellen, maken we in hoofdstuk 5 een vergelijkende studie
tussen beide, wat de voor-en nadelen zijn en in welk doelgebied ze het beste toepasbaar
zijn. Hier zullen we ook verschillende manieren van stimulatie onderzoeken , zoals cyclische
stimulatie of permanente stimulatie, wat het effect is indien het elektrische veld langer
aanwezig is etc. We zullen zien dat de resultaten hier verschillend gaan zijn voor beide
modellen, en dit voor bepaalde waarden van het elektrische veld en de parameters in
kwestie. Ten slotte volgt er in hoofdstuk 6 een conclusie met alle resultaten die we geboekt
hebben in dit eindwerk.
Hoofdstuk 2
Theoretische achtergrond
2.1
Inleiding
Vooraleer we beginnen met het ontwerp van de modellen gaan we eerst overlopen wat er
precies gemodelleerd moet worden. Zo komen we terecht bij de anatomie van het brein
en neuronen. De anatomie van het brein zal ons helpen om een geschikt hoofdmodel te
ontwerpen. De anatomie van het neuron zal dan dienen als nodige achtergrond om te
bepalen hoe het elektrische equivalent van een neuron er precies uitziet. Verder wordt
uitgelegd hoe TMS een elektrisch veld creëert via de wetten van Maxwell en welk type
spoel gebruikt wordt. Vervolgens wordt de theorie overlopen van het passieve model,
gevolgd door een analyse van mogelijke uitbreidingen die ondersteund wordt door een
literatuurstudie.
2.2
2.2.1
Het brein
Inleiding
Zoals gezegd bestaat het brein uit zeer complexe structuren van cellen die neuronen worden
genoemd. Evolutionair gezien zijn neuronen een geavanceerde manier van communicatie
in het lichaam. In eenvoudige organismen, en ook nog bij talrijke processen bij de mens,
gebeurt de communicatie via hormonen. Deze chemische vorm van communicatie houdt
in dat stoffen, gecreëerd door een bepaalde klier, meegevoerd worden in de bloedstroom
en zo door andere cellen met de juiste receptoren opgevangen worden. Deze cellen zullen
hierop een bepaalde activiteit tonen. Het bekendste voorbeeld is adrenaline, een hormoon dat geproduceerd wordt door de bijnieren en het lichaam voorbereidt op gevaarlijke
situaties(versnelling van de hartslag, vergroten van de pupil etc.).
Bij dit communicatiesysteem zijn er twee problemen, het is niet specifiek genoeg en het is
vrij traag. Met specificiteit wordt bedoeld dat, eenmaal het hormoon in de bloedstroom zit,
alle cellen aangesproken zullen worden die receptoren hebben voor het hormoon in kwestie.
De bloedsomloop duurt gemiddeld 22 seconden waardoor deze vorm van communicatie niet
snel genoeg is. Chemische communicatie is dus duidelijk niet goed genoeg. Bij neuronen
gebeurt de communicatie via elektrische pulsen wat specificiteit en snelheid wel verzekert.
7
Hoofdstuk 2. Theoretische achtergrond
8
Het geheel van neuronen in het lichaam noemt men het zenuwstelsel en is opgebouwd uit
twee delen, namelijk het centrale(CZS) en het perifere zenuwstelsel(PZS). Het centrale
deel bevat de hersenen, de hersenstam en het ruggenmerg en het perifere deel bestaat uit
12 paar craniale en 31 paar spinale zenuwen. Gemiddeld gezien zijn de neurale cellen in het
PZS ook groter dan die van het CZS. Het perifere deel heeft als doel om de communicatie
te verzorgen tussen het CZS en de rest van het lichaam. In dit eindwerk is het PZS minder
van belang aangezien wij ons gaan toespitsen op het CZS, en meer bepaald op de hersenen
zelf.
Er kunnen talrijke complexe neurale structuren gevonden worden in het brein die elk
een eigen functie hebben. In ons model zal het belangrijk zijn om deze structuren op
een realistische manier te modelleren waardoor het elektrische veld correct berekend kan
worden. In dit hoofdstuk overlopen we de anatomie van het brein en alle delen die invloed
kunnen hebben op de TMS en dus geı̈ncorporeerd moeten worden in het hoofdmodel. We
overlopen drie belangrijke invloeden: neurale structuren, hersenvliezen en ophopingen van
de spinale vloeistof in de hersenen.
2.2.2
Anatomie van het brein
Zoals gezegd bestaat het CZS uit de hersenen, de hersenstam en het ruggenmerg, waarbij
de hersenstam het ruggenmerg en de hersenen verbindt. Het is opgebouwd uit de pons,
het mesencefalon en de medulla oblongata zoals te zien is op figuur 2.1.
Figuur 2.1: De interne structuur van het brein[7]
Deze structuur heeft drie hoofdfuncties, namelijk een neuronale verbinding tussen het ruggenmerg en het brein, het controleren van de hoofdspieren en het controleren van opwin-
Hoofdstuk 2. Theoretische achtergrond
9
ding. Verder speelt de medulla oblongata en de pons een rol in het regelen van bloeddruk
en ademhaling. Het mesencefalon speelt een rol in het controleren van oogbewegingen.
De hersenen zelf bestaan uit het cerebellum en het cerebrum, respectievelijk ook de kleine
en de grote hersenen genoemd . Het cerebellum ligt achter de pons en staat in voor
motorische bewegingen en het in stand houden van het evenwicht[8].
De grote hersenen bestaan uit het diencefalon en het telencefalon. Het diencefalon, afgebeeld op figuur 2.2 is centraal gelegen en omvat onder andere de thalamus en de hypothalamus. De thalamus is een verbindingspunt voor sensoren(smaak, geur etc.), de
hypothalamus zorgt voor temperatuurregeling, emotionele toestanden en het regelen van
slaap. De thalamus wordt vaak gezien als een centrale sensorische relais post en zal daarom
een belangrijke rol spelen in het hoofdmodel.
Figuur 2.2: De structuur van het diencefalon[9]
Het telencefalon op zijn beurt is opgedeeld in grijze en witte materie. In de grijze materie
liggen neuronen die ingedeeld zijn in horizontale lagen en verticale kolommen. Deze materie bevindt zich aan de oppervlakte van de hersenen(de cortex) en rond het diencefalon(de
basale ganglia). De witte materie bevindt zich tussen de cortex en de basale ganglia en
Hoofdstuk 2. Theoretische achtergrond
10
bestaat uit lange uitlopers van neuronen(axonen) die omringd zijn door myeline. Dit verklaart ook de witte kleur. De cortex bestaat ook uit talrijke kronkels en spleten(gyri en
sulci) die evolutionair tot stand zijn gekomen om de oppervlakte optimaal te benutten.
De grootste sulci delen de hersenen in, in 4 hoofdlobben genaamd de temporale lob, de
pariëtale lob, de occipitale lob en de frontale lob. Elk deel van de cortex heeft zijn eigen
functie. Het gebied van Brodmann, waar een deel van te zien is op figuur 2.3 geeft aan
welk deel overeenkomt met welke functie.
Figuur 2.3: Een schema van het gebied van Brodmann
Op figuur 2.4 zien we een schema van de grootste zenuwen die voorkomen in het hoofd.
We zien dat de meeste zenuwen inderdaad lopen via de thalamus met de cortex als eindbestemming. In de verdere hoofdstukken zullen we onze neuronenbundel dan ook situeren
tussen de thalamus en de cortex.
Hoofdstuk 2. Theoretische achtergrond
11
Figuur 2.4: Schema van zenuwen in een doorsnede van het hoofd[8]
2.2.3
Hersenvliezen
Het CZS is bedekt door 3 hersenvliezen. Het dura mater is het dikste membraan en
ligt juist onder het bot. Het heeft als voornaamste taak om bescherming te bieden tegen externe stoten. Hieronder ligt het arachnoı̈d mater en tussen deze twee is er nog
ruimte aanwezig voor bloedvaten en hersenvocht, genaamd de subdurale ruimte. Tegen
het hersenweefsel ligt ook nog de pia mater. Tussen het pia en het arachnoid ligt de
subarchnoı̈dale ruimte waar het hersenvocht kan circuleren(figuur 2.5).
Figuur 2.5: Doorsnede van de hersenvliezen[10]
Hoofdstuk 2. Theoretische achtergrond
2.2.4
12
Spinale vloeistof
Het hersenvocht, of spinale vloeistof heeft als taak om belangrijke voedingstoffen te verspreiden over de hersenen. Er zijn vier ventrikels, afgebeeld op figuur 2.6, waar deze
vloeistof is opgeslagen, namelijk twee laterale ventrikels, het derde en het vierde ventrikel.
De vloeistof circuleert ook in de subarchnoı̈dale ruimte waar het dient als extra bescherming tegen klappen op het hoofd. Hier zijn ook speciale granulaties aanwezig die de
vloeistof terug opnemen in de ventriculaire circulatie waardoor er geen ophoping ontstaat
van deze vloeistof in de hersenen zelf[11].
Figuur 2.6: De 4 ventrikels in het brein[12]
2.3
2.3.1
Het neuron
Inleiding
Het neuron is de cellulaire eenheid van het zenuwstelsel. Het brein is in feite een complexe
structuur van ongeveer 100 miljard neuronen die verantwoordelijk zijn voor de elektrische
communicatie in het lichaam. Uit de anatomie van een neuron gaan we de belangrijkste
eigenschappen halen om tot een geschikt wiskundig model te komen.
Hoofdstuk 2. Theoretische achtergrond
2.3.2
13
Anatomie van het neuron
Er bestaan verschillende soorten neuronen, maar elk neuron heeft telkens dezelfde kenmerken. Een neuron bestaat uit een cellichaam waar de celkern zich bevindt, een axon dat
verantwoordelijk is voor de elektrische output van de cel, en verschillende vertakkingen,
genaamd dendrieten die zorgen voor de elektrische input. Het axon is gevuld met een
axoplasma dat zal dienen als geleider voor de elektrische communicatie. Rond bepaalde
axonen kunnen ook Schwann cellen gewikkeld zijn die een myelineschede vormen. Deze
laag zorgt voor bescherming en isolatie, waardoor de pulsen zich ook sneller zullen voortplanten in het axon. Tussen de Schwann cellen zit telkens een vrije plaats die de node
van Ranvier wordt genoemd. Al deze eigenschappen zijn terug te vinden op figuur 2.7 en
zullen van belang zijn bij het opstellen van het model van het neuron.
Figuur 2.7: De anatomie van het neuron[8]
2.3.3
Werking van het neuron
Wanneer een elektrisch signaal de eindpunten van het axon bereikt zullen neurotransmitters vrijgelaten worden in de synaps, de ruimte tussen 2 grenzende neuronen. Deze
moleculen zullen dan inwerken op een dendriet van een volgend neuron en daar een nieuw
elektrisch signaal genereren. Dit gebeurt enkel indien er voldoende neurotransmitters
vrijgelaten worden en het eerste elektrische signaal dus groot genoeg is.
Als men een neuron bestudeert blijkt echter dat axonen zeer slechte geleiders zijn. Dit
Hoofdstuk 2. Theoretische achtergrond
14
komt omdat het axoplasma een zeer lage conductiviteit heeft, ongeveer 50 keer lager
dan koper en het membraan een zeer slechte isolator is (een miljoen keer slechter dan
rubber)[13]. Een extra reden is uiteraard de zeer kleine diameter van het axon en de fijne
membraan laag. Het elektrische signaal zal na 2 cm ongeveer zo gedaald zijn dat het niet
meer herkend zal worden door het volgende neuron in het netwerk. De normale elektrische
conductiviteit via een axon zal dus niet genoeg zijn om aan rechtstreekse, betrouwbare
communicatie te voldoen. Om dit aan te tonen gebruiken we een eenvoudig model voor het
neuron. Het membraan wordt voorgesteld door een weerstand per lengte-eenheid rm (Ωm)
en het axoplasma wordt voorgesteld door een weerstand
per lengte-eenheid ra (Ω/m). Met
q
rm
dit systeem vinden we een ruimteconstante van l ra . Deze constante bepaalt hoe de
membraanpotentiaal zal dalen in functie van de afstand. De membraanpotentiaal kent hier
een exponentieel dalend verloop. Voor het axon van een zenuw van een kikker bedraagt
deze ruimteconstante 4 mm. Na 1 cm ongeveer zal de originele potentiaal dus al meer dan
90 procent verzwakt zijn, wat tot gevolg heeft dat dit systeem enkel gebruikt kan worden
bij korte neuronen en zenuwbundels[13].
Actiepotentialen kunnen daarentegen wel getransporteerd worden over lange afstanden.
Dit systeem werkt met spanningsgestuurde kanalen in het membraan langs het axon en
wordt uitvoerig besproken in hoofdstuk 4.
2.4
2.4.1
TMS
Inleiding
Transcraniële magnetische stimulatie is een niet-invasieve techniek die een depolarisatie of
een hyperpolarisatie kan induceren in neuronen. Maar hoe werkt dit nu? Een tijdsafhankelijke stroom vloeit door een spoel, dicht bij het hoofd, wat een magnetisch veld creëert
in en rond de hersenen. Dit veld genereert dan wervelstromen in het brein, waardoor een
elektrisch veld zal ontstaan in dit weefsel. Zoals vermeld zal er een hoofdmodel nodig zijn
om dit elektrische veld te berekenen. Afhankelijk van de fysiologische eigenschappen van
het neuron zal dit veld een hyperpolarisatie of een depolarisatie creëren in het neuron, wat
gepaard gaat met het vloeien van een stroom.
2.4.2
De spoel
De spoel die we hier gebruiken heeft een enkele ronde vorm met een binnenstraal van 2 cm
en een buitenstraal van 2.5 cm. Hierdoor vloeit een sinusoı̈dale stroom met een amplitude
van 7.66 kA en een frequentie van 3.6 kHz:
Icoil = 7660sin(2π3600t)
(2.1)
Verder bestaat de spoel uit één enkele winding met een straal van 0.25 cm, waardoor we
een stroomdichtheid krijgen van:
15
Hoofdstuk 2. Theoretische achtergrond
Jcoil =
2.4.3
7660
= 3.9 · 108 A/m2 = 390A/mm2
π0.00252
(2.2)
Generatie van het elektrische veld
We overlopen kort hoe de spoel een elektrisch veld genereert in het weefsel. We gebruiken
een spoel die werkt aan een vaste frequentie van 3.6 kHz. Deze spoel zal een magnetisch
~ (tesla) genereren, dat we kunnen berekenen met de wet van Biot-Savart:
veld B
~ = µ0
B
4π
ZZZ
V
~ × (~r − ~s)
Jcoil
dv
k~r − ~sk3
(2.3)
k~r − ~sk is de vector tussen het punt van de geleider en het punt waar het veld berekend
wordt. Er wordt geı̈ntegreerd over het volume V van deze geleider. µ0 en Jcoil zijn respectievelijk de absolute permeabiliteit in vacuüm (4π × 10−7 N/A2 ) en de stroomdichtheid
~ als E
~ afhankelijk zijn van
doorheen de spoel (A/m2 ). We merken ook op dat zowel B
zowel plaats als tijd, maar deze afhankelijkheid laten we weg voor een simpelere notatie.
Dit variabele magnetische veld zal een elektrisch veld opwekken volgens de wet van Faraday(vergelijking 2.4) die zegt dat de rotatie van een elektrisch veld gelijk is aan de
negatieve tijdsafgeleide van de magnetische inductie. Deze formule zetten we om naar het
frequentiedomein(vergelijking 2.5) en ten slotte gebruiken we de wet van Stokes die zegt
~ over een oppervlak S gelijk is aan de lijnintegraal
dat de integratie van een rotatie van E
~ over de grens c van dit oppervlak(vergelijking 2.6)[14].
van E
I
c
~
~ = − ∂B
∇×E
∂t
(2.4)
~ = −jω B
~
∇×E
(2.5)
~ · d~c = −jω
E
Z
S
~ · d~s
B
(2.6)
Het opgewekte elektrische veld zal nu een stroom induceren die afhankelijk is van de
2 ) de elektrische verplaatsing,
~
desbetreffende materiaaleigenschappen. Hierbij is D(C/m
~
gegeven door E.
~
~ + ∂D
J~tot = σ E
∂t
(2.7)
~ + jωE
~
J~tot = σ E
(2.8)
~ =
E
J~tot
σ + jω
(2.9)
16
Hoofdstuk 2. Theoretische achtergrond
Vergelijkingen 2.7-2.9 bepalen de relatie tussen de totale stroomdichtheid Jtot en het elek~ Het eerste deel van 2.7 is afkomstig van het tijdsvariabele magnetische
trische veld E.
veld, het tweede deel is afkomstig van de ladingseparaties op de nabij gelegen geleiders.
Vergelijking 2.8 is een aanpassing naar het frequentiedomein. σ en zijn materiaaleigenschappen en staan respectievelijk voor de conductiviteit(S/m) en de permittiviteit(F/m).
Ten slotte vullen we vergelijking 2.9 en 2.3 in, in 2.6:
I
c
Z
ZZZ
µ0
J~tot
· d~c = −jω
σ + jω
S 4π
V
~ × (~r − ~s)
Jcoil
k~r − ~sk3
!
dv · d~s
(2.10)
Uit deze vergelijking kunnen we nu de totale geı̈nduceerde stroomdichtheid halen, uitgaande van de stroom in de spoel, en de materiaaleigenschappen van het weefsel.
2.5
2.5.1
Simulatiemodellen
Inleiding
In deze sectie bespreken we het passieve model, hoe het equivalente elektrische circuit
er uitziet, en hoe de membraanpotentialen zich zullen verspreiden over het axon. Een
membraanpotentiaal zal altijd gepaard gaan met een stroom, deze stroom loopt door
het axoplasma en lekt weg langs het membraan. Men kan onderscheid maken tussen
een actief en een passief model. Eerst zullen we het passieve model bespreken, waarbij
de membraaneigenschappen onafhankelijk zijn van de membraanpotentiaal Vm . Bij het
actieve model zijn deze wel afhankelijk van Vm . Dit model bespreken we in hoofdstuk 4.
In de volgende sectie maken we een passief elektrisch equivalent van het neuron en in
hoofdstuk 4 doen we hetzelfde voor de actieve benadering. Veel van de parameters zijn
afhankelijk van de diameter en van de lengte van het model zelf, vandaar dat we hier rekening houden met enkele vaste conventies. De gebruikte waarden voor zowel het passieve
als het actieve model staan in tabel 2.1 samen met de eenheden.
Tabel 2.1: Gebruikte parameters
Parameters van het model
Parameter
Eenheid
Uitleg
rm
cm
ra
Rm
Cm
Ra
a
Ωm
F/m
Ω/m
Ωm2
F/m2
Ωm
m
Membraanweerstand per lengte-eenheid
Membraancapaciteit per lengte-eenheid
Axiale weerstand per lengte-eenheid
Specifieke membraanweerstand
Specifieke membraancapaciteit
Specifiek axiale weerstand
Straal van de neuronenbundel
17
Hoofdstuk 2. Theoretische achtergrond
De specifieke membraanweerstand wordt berekend volgens Rm = rm · 2πa, de specifieke
cm
membraancapaciteit volgens Cm = 2πa
en de specifieke axiale weerstand volgens Ra =
2
ra · πa , met a de straal van de neuronenbundel.
2.5.2
Het passieve model
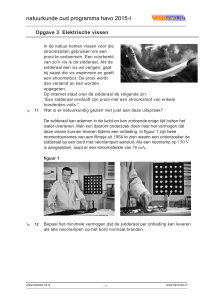
Voor dit model zijn er enkele vereenvoudigingen. Zoals gezegd zijn de membraaneigenschappen onafhankelijk van de membraanpotentiaal. Verder worden de elektrische eigenschappen van de kabel als uniform beschouwd en het dendriet als een cilinder gemodelleerd.
De extracellulaire vloeistof heeft ook een verwaarloosbare weerstand r0 waardoor de extracellulaire potentiaal overal gelijk wordt. Er wordt ook vanuit gegaan dat de activiteiten
van de zenuw een verwaarloosbare extracellulaire potentiaal creëren, waardoor de interne
membraanspanning gelijkgesteld kan worden aan de membraanspanning. De rustpotentiaal wordt momenteel nog nul verondersteld. Ten slotte wordt de intracellulaire vloeistof
gezien als een ohmse geleider.
Figuur 2.8: Schema van het passieve kabel model
Figuur 2.8 geeft het elektrische model van de kabel weer die geörienteerd is volgens de
x-as. Het membraan is voor te stellen als een serie van parallel geschakelde weerstanden
en condensatoren. Ia en Im zijn respectievelijk de axiale stroom en de membraanstroom.
Via deze representatie proberen we nu de membraanpotentiaal te berekenen in functie van
de plaats en de tijd. Wanneer op een bepaalde plaats stroom wordt geı̈njecteerd, door
een extern aangelegd elektrisch veld, zal deze stroom intracellulair door het axoplasma
vloeien, en langzaamaan weglekken langs het membraan. We bekomen vergelijking 2.11:
Ia = −
1 ∂Vm
·
ra ∂x
(2.11)
18
Hoofdstuk 2. Theoretische achtergrond
De stroomverandering in de x richting wordt bepaald door de lekstroom door het membraan:
∂Ia
= −im
∂x
im is de membraanstroom per lengte-eenheid en wordt bepaald door
stroom loopt dus door een parallelle RC schakeling. We krijgen:
im = cm
(2.12)
Im
l .
Deze membraan-
∂Vm Vm
+
∂t
rm
(2.13)
Indien we 2.11,2.12 en 2.13 combineren krijgen we de bekende kabelvergelijking:
∂Vm
1 ∂ 2 Vm
1
·
= cm ·
Vm
+
2
ra ∂x
∂t
rm
(2.14)
Indien we nu de tijds-en ruimteconstanten τ en λ introduceren en rekening houden met
het elektrische veld krijgen we:
λ2 ·
∂ 2 Vm
∂Vm
∂Ex
= τm ·
+ Vm + λ2
2
∂x
∂t
∂x
(2.15)
q
λ wordt berekend via rrma en bepaalt de afstand waarover een potentiaal zich kan verspreiden. In het geval van een exponentieel dalende functie betekent dit dat na afstand λ
de membraanpotentiaal gedaald zal zijn met een factor e. Hoe groter de membraanweerstand, hoe minder stroom zal weglekken en hoe verder de potentiaal zal reiken. Bij een
grotere axiale weerstand zal de stroom meer axiale weerstand ondervinden en zal er een
grotere lekstroom zijn, met een kleinere ruimteconstante tot gevolg.
De tijdsconstante τ wordt bepaald door rm · cm en deze waarde duidt in feite aan hoe snel
de potentiaal kan veranderen in functie van de tijd. Een grote waarde betekent dus dat
het neuron heel traag zal reageren op een externe stimuli.
De extra term in 2.15 wordt de activatiefunctie genoemd en is afkomstig van de externe
stimulatie. Er wordt van uitgegaan dat enkel de axiale component van het elektrische veld
een invloed zal hebben(sectie 2.6.4), waardoor de membraanpotentiaal Vm enkel afhankelijk is van de axiale afstand en de tijd.
2.5.3
Het actieve model
Bij het actieve model zal het membraan van het axon zodanig gemodelleerd worden dat
de verschillende ionenkanalen die daar aanwezig zijn in rekening gebracht worden. We
verwachten dus dat de parallelle RC schakeling gewijzigd zal worden. De theorie voor dit
model is te vinden in het begin van hoofdstuk 4, waar ook de verdere resultaten van dit
model staan beschreven.
Hoofdstuk 2. Theoretische achtergrond
2.6
2.6.1
19
Uitbreidingen van het simulatiemodel
Inleiding
De vraag is nu in welke mate de modellen de realiteit benaderen. Het passieve model dat
we hier hanteren, wordt zeer vaak gebruikt in de literatuur[15][16][17][18]. In de realiteit is
de anatomie van een neuron uiteraard veel complexer. Zo zijn de axonen van neuronen in
witte materie omringd door myeline, en treden er vaak talrijke vertakkingen op waardoor
de membraanpotentiaal ook verschillende richtingen op kan gaan. We overlopen nu enkele
modellen die verder bouwen op het passieve uitgangspunt, en bekijken in welke mate deze
modellen toepasbaar zijn in dit werk.
2.6.2
De myeline laag
Eén van de eerste punten in het opstellen van het model is de vraag of een myelinelaag
een belangrijke invloed zal hebben. Wat voor invloed zal myeline nu hebben en hoe moet
het model hieraan aangepast worden?
Wat is myeline?
De myelinelaag werkt als een beschermingslaag rond de zenuw. Vooral langere en grotere
zenuwen zijn hierdoor omringd en enkel axonen kunnen myeline bevatten. In het perifere
zenuwstelsel is de laag afkomstig van Schwann cellen die enkele keren rond het axon zijn
gedraaid. In het centrale zenuwstelsel ontstaat myeline uit oligodendrocyte cellen, zoals te
zien is op figuur 2.9. Belangrijk is ook dat opeenvolgende oligodendrocyte (of Schwann)
cellen elkaar niet raken, ertussen zit telkens een node van Ranvier(figuur 2.7). Deze laag
heeft nu een grotere weerstand, vergeleken met de normale membraanweerstand, waardoor
er minder stroom weglekt langs het membraan. Men noemt de delen van het brein met
myeline witte materie, en de delen zonder grijze materie.
Figuur 2.9: De werking van een oligodendrocyte cel
Hoofdstuk 2. Theoretische achtergrond
20
Aanpassing van het passieve model
In [17] wordt een eenvoudige vorm van de kabelvergelijking afgeleid voor een axon omringd
door myeline. Eerder werd aangenomen dat myeline perfect isolerend is, maar zoals zal
blijken is dit niet het geval, en zal dit aangepast worden in de tijds-en-ruimteconstanten.
Figuur 2.10[17] toont het model van het axon, samen met de myeline en de node van
Ranvier. Het model zal dus uit twee delen bestaan, één voor de sectie met myeline en één
voor de node.
Figuur 2.10: De voorstelling van een neuron met myeline
χ(x) heeft de waarde 1 indien x ter hoogte van de node van Ranvier ligt en nul in het
andere geval. Deze functie is een opeenvolging van heavyside functies H en wordt gegeven
door:
∞ X
δ
δ
χ(x) =
H x − nL +
− H x − nL −
2
2
n=−∞
(2.16)
L is de afstand tussen twee nodes, en δ is de grootte van een node.
De kabelvergelijking wordt nu bepaald als de som van twee delen, met elk deel zijn eigen
ruimte-en tijdsconstanten:
∂ 2 Vm
τm ∂V
V
τn ∂V
V
∂Ex
= (1 − χ(x))( 2
+ 2 ) + χ(x)( 2
+ 2 +
)
2
∂x
λm ∂t
λm
λn ∂t
λn
∂x
(2.17)
Het eerste deel bepaalt de membraanpotentiaal in het myeline gedeelte, het tweede deel bij
de node. Bij de node van Ranvier zal het elektrische veld een veel grotere invloed hebben
op de membraanpotentiaal, waardoor men kan aannemen dat enkel een activatiefunctie
aanwezig is bij de node van Ranvier. De ruimteconstanten worden bepaald door:
21
Hoofdstuk 2. Theoretische achtergrond
λn,m =
r
rn,m
ra
(2.18)
rn , rm en ra staan respectievelijk voor de membraanweerstand per lengte-eenheid van
de node en myeline en voor de axiale weerstand per lengte-eenheid. De tijdsconstanten
worden gegeven door:
τn,m = rn,m · cn,m
(2.19)
cn en cm staan voor de capaciteit per lengte-éénheid van het membraan voor respectievelijk
de node en het myeline gedeelte.
Figuur 2.11[17] geeft de materiaaleigenschappen weer van het axon.
Figuur 2.11: De waarden van het myeline model
Met deze gegevens vinden we de waarden 0.433 cm en 0.0061 cm voor de ruimteconstanten
Hoofdstuk 2. Theoretische achtergrond
22
met en zonder myeline. De tijdsconstanten komen op 500 µs en 100 µs. Omdat de
kabelvergelijking van de wetten van Kirchoff is afgeleid zijn de stromen en de potentialen
op de grensgebieden ook continue en afleidbaar. Zoals we gezien hebben in sectie 2.2 zijn
de cortex, het mesencefalon en de basale ganglia allemaal grijze materie. Tussen de cortex
en het mesencefalon ligt witte materie. Op figuur 2.12 is de doorsnede van een brein
gegeven waar de witte en grijze materie duidelijk te zien zijn.
Figuur 2.12: De doorsnede van een menselijk brein. De lichte kleur staat voor witte
materie, de donkere voor grijze materie
In ons model kunnen we benaderend zeggen dat de binnenste kern en de buitenste oppervlakte uit grijze materie bestaat. Hiertussen zitten neuronen omringd door myeline.
In hoofdstuk 3 zullen we de aanwezigheid van myeline modelleren en de invloed hiervan
bestuderen.
2.6.3
Het effect van omringende geleiders
We hebben in formule 2.4 gezien dat het elektrische veld afhankelijk is van de tijdsafgeleide
~ = 0 [15][16]. In [15] wordt
van het magnetische veld en verder moet ook gelden dat ∇ · E
~ opgesplitst in twee componenten, een primair deel
het geı̈nduceerde elektrische veld E
afkomstig van het magnetische veld dat verandert in functie van de tijd, en een secundair
deel afkomstig van de ladingseparatie in geleiders rond het axon. Het eerste deel wordt
~ terwijl het tweede deel wordt voorgesteld door
voorgesteld door een vectorpotentiaal A
een scalaire potentiaal V. We krijgen:
~
~ = − ∂ A − ∇V
E
∂t
(2.20)
Beide componenten hebben een intracellulair(subscript i) en een extracellulair deel(subscript
e). Het elektrische veld in de cel, evenwijdig met de z-as, wordt nu gevormd door
~i
A
i
Ei = − ∂∂t
− ∂V
∂z . We weten ook dat Vm = Vi − Ve , en in de kabelvergelijking zien
23
Hoofdstuk 2. Theoretische achtergrond
we dat Vm wordt opgenomen aan de linkerkant van de vergelijking. De activatiefunctie zal
~ i en Ve . De extracellulaire primaire component A
~ e komt
dus enkel afhankelijk zijn van A
~ i door de kleine radiale afstand tussen de
hier niet in voor, maar deze is wel gelijk aan A
2
twee. Zo krijgen we inderdaad als activatiefunctie λ2 ∂∂zV2e wat vereenvoudigd kan worden
z
tot λ2 ∂E
∂z .
Nagarajan en Durand hebben de precieze invloed van die extracellulaire ’secundaire’ potentialen onderzocht in [15] en kwamen tot de conclusie dat deze inderdaad verwaarloosbaar
zijn.
2.6.4
Invloed van het transverse deel van de activatiefunctie
De meeste modellen gaan ervan uit dat het elektrische veld in het neuron enkel een belangrijke axiale(evenwijdig met het neuron) component Ek heeft. Een mogelijke transversale
component E⊥ wordt dus verwaarloosd, maar is dit wel een aanvaardbare veronderstelling?
Hierbij bestuderen we de paper van Ruohonen et al.[19].
x
In de meeste studies worden enkel de gevallen bestudeerd waarin de spoel een hoge − ∂E
∂x
genereert. Er bestaan echter gevallen waar spieractiviteit waargenomen wordt terwijl
een spoel geen parallelle component creëert. Dit onverwachte resultaat is te wijten aan de
transversale component van het elektrische veld, wat leidt tot een nieuwe kabelvergelijking:
λ2 ·
∂ 2 Vm
∂Vm
− Vm = τ
+ 2a(αEk − E⊥ )
2
∂x
∂t
(2.21)
2
α staat voor λ2a . Het belang van elke component wordt dus bepaald door α. Een kleine
α duidt op een grotere transversale component, terwijl een grotere α op een grotere parallelle component wijst. In sectie 2.6.2 hebben we gezien dat myeline een veel grotere
ruimteconstante teweegbrengt, met als gevolg een grotere α. We verwachten dus dat voor
witte materie de transversale component minder belang zal hebben. Verder geldt ook dat
hoe kleiner de neuronen, hoe kleiner de straal a zal zijn, en hoe groter α. Het centrale
zenuwstelsel bestaat nu uit veel kleinere axonen dan het perifere zenuwstelsel, waardoor
we ook verwachten dat zelfs de grijze massa een beperkte invloed zal ondervinden van de
transversale component van het elektrische veld.
2.6.5
Het effect van weefsel heterogeniteit
Bij het ontwerpen van het model kan men de vraag stellen in welke mate het weefsel
het model zal beı̈nvloeden, m.a.w. hoe verandert de membraanpotentiaal in functie van
variabele weefseleigenschappen, bijvoorbeeld bij de overgang van witte naar grijze materie.
Miranda et al.[20] hebben hier onderzoek naar gedaan, waarbij de discontinuı̈teit in het
elektrische veld aan een transitie tussen verschillende weefsels wordt gegeven door:
∆En = 2
σ1 − σ2
E·n
σ1 + σ2
(2.22)
24
Hoofdstuk 2. Theoretische achtergrond
σ1 en σ2 zijn de conductiviteiten van de twee weefsels en ~n is de vector loodrecht op
het grensvlak. Om het effect van zo een discontinuı̈teit te onderzoeken wordt een activatiefunctie aangemaakt waarbij ∆E evenredig is met een Dirac delta functie: ∆Ex δ(x).
Uit de kabelvergelijking 2.15 volgt dat deze discontinuı̈teit aanleiding zal geven tot een
verandering V 0 (x)in de membraanpotentiaal volgens:
V 0 (x) = −
λ∆Ex − |x|)
e λ
2
(2.23)
Hierbij wordt ∆Ex gegeven door ∆En cos(θ), met θ de hoek tussen de bundel en ~n. Op
het grensvlak vinden we een extra term λ∆Ex /2 afkomstig van de heterogeniteit van het
weefsel. In de paper wordt verder aangetoond dat deze discontinuı̈teiten een groot belang
zullen hebben bij het exciteren van zenuwen die door de verschillende weefsels lopen. We
zullen inderdaad in de komende hoofdstukken zien dat de plaatsen van weefselovergangen
een grote invloed gaan hebben op de verdeling van de membraanpotentialen.
Hoofdstuk 3
Het passieve model
3.1
Inleiding
In dit hoofdstuk wordt het passieve model besproken. zoals we gezien hebben in sectie
2.5.2 veronderstellen we hier dat de membraaneigenschappen onafhankelijk zijn van de tijd
en de ruimte. We zullen eerst de karakteristieken van het hoofdmodel en de bijhorende
berekeningen voor het elektrische veld bespreken. Dit elektrische veld zal de neuronenbundel stimuleren, waarvoor we later in dit hoofdstuk een model opstellen en oplossen.
We doen dit zowel analytisch als numeriek en in de zesde sectie vergelijken we de beide
methodes. Aangezien bepaalde aannames nodig zijn bij de analytische methodes, gaan we
onze volledige oplossing in sectie zeven ook vergelijken met de simulatie-omgeving Neuron.
3.2
3.2.1
Het hoofdmodel
Inleiding
Vooraleer we beginnen met het oplossen van de kabelvergelijking gaan we eerst de vorm en
eigenschappen van het hoofdmodel bepalen waarin onze neuronenbundel zal liggen. Het
gegenereerde elektrische veld, afkomstig van het magnetische veld, is immers afhankelijk
van de conductiviteit en de permittiviteit van het type materiaal zoals te zien is in vergelijking 2.9. Dit hoofdmodel bepaalt dus hoe het aanwezige elektrische veld er precies zal
uitzien.
3.2.2
Een standaard model
Ons model bestaat uit een kubus van 200 x 200 x 200 mm3 waarin zich concentrische
sferen plaatsvinden. Deze sferen stellen verscheidene lagen van de hersenen voor, zodat
elke laag overeenkomt met een bepaald type weefsel. Deze weefsels waren al te zien in
figuur 2.1. De bijhorende weefseleigenschappen die nodig zijn om het elektrische veld te
berekenen staan in tabel 3.1[21]. We plaatsen de spoel boven het hoofd, op een afstand van
1.8 cm ten opzichte van het bovenste punt van de buitenste sfeer. Het model is afgebeeld
op figuur 3.1. De permittiviteit die we gaan gebruiken in de formules wordt bepaald door
vergelijking 3.1 waarbij 0 de permittiviteit van vacuüm voorstelt(8.85419 · 10−12 F/m) en
25
26
Hoofdstuk 3. Het passieve model
r de relatieve permittiviteit van het weefsel.
= r · 0
(3.1)
In de kubus berekenen we het elektrische veld volgens de formules 2.3 tot 2.10. Hiervoor
gebruiken we een voxelgrootte van 5 mm. Aangezien de kubus een grootte heeft van 200
x 200 x 200 mm3 , zullen we drie 3D matrices krijgen: Ex , Ey en Ez , elk met een grootte
~ in respectievelijk de x,y of z- richting voor alle
van 40 x 40 x 40. Elke matrix bevat E
voxels in de kubus.
3.2.3
Het elektrische veld
Op de figuren 3.2 en 3.3 staan de waarden afgebeeld van de drie matrices voor doorsnedes
van het xy-, yz-en xz-vlak.
Met deze data kan nu de activatiefunctie van de kabelvergelijking berekend worden. Zoals
we gezien hebben in sectie 2.6.4 moeten we enkel de waarden in rekening brengen die
parallel liggen in de neuronenbundel. Om deze waarden in de bundel te berekenen zullen
we gebruik maken van trilineaire interpolatie. Voor elk punt langs de bundel bekijken we
een kubus, met de voxelgrootte als lengte, deze voxelgrootte werd ook gebruikt om het
elektrische veld in het hoofdmodel te berekenen. Op elke hoek van deze kubus hebben
we een correcte waarde van het veld, zoals te zien is op figuur 3.4. Om de juiste waarde
van het elektrische veld in punt P te berekenen, passen we een opeenvolging van lineaire
interpolaties toe. Eerst berekenen we de 4 punten I1, I2, I3 en I4, dan gebruiken we deze
punten om I5 en I6 te vinden om uiteindelijk het elektrische veld in punt P te berekenen.
Tabel 3.1: Parameters van het hoofdmodel
Parameters van het hoofdmodel
Weefsel
Straal(m)
Conductiveit(S/m)
Relatieve permittiviteit(-)
thalamus
witte materie
grijze materie
schedel
hoofdhuid
lucht
0.02
0.07
0.08
0.086
0.092
-
0.107
0.066
0.107
0.020
0.0011
0
56950 - 534495i
26488 - 327708i
56950 - 534495i
1080 - 101542i
30374 - 5283i
1.00054
Hoofdstuk 3. Het passieve model
27
Figuur 3.1: Het sferische hoofdmodel
Figuur 3.4: Trilineaire interpolatie
3.3
De neuronenbundel
Hier bekijken we hoe de bundel het best kan geplaatst worden in het hoofdmodel en welke
waarden de parameters uit tabel 2.1 moeten krijgen. In sectie 2.2 hebben we gezien dat
zenuwen in het algemeen opstijgen van de thalamus naar de cortex. Aangezien de thalamus
en de cortex(grijze materie) respectievelijk de eerste en de derde sfeer voorstellen in het
Hoofdstuk 3. Het passieve model
Figuur 3.2: visualisaties van Ex en Ey in het xy-,xz-en yz-vlak
28
Hoofdstuk 3. Het passieve model
Figuur 3.3: Visualisaties van Ez in het xy-,xz-en yz-vlak
29
30
Hoofdstuk 3. Het passieve model
model, zullen we de neuronbundel modelleren als een rechte lijn tussen deze twee sferen
onder twee ruimtehoeken α en θ zoals te zien is op figuur 3.5. Het nulpunt van dit stelsel
ligt in het centrum van de thalamus(figuur 3.1).
Figuur 3.5: Ruimtehoeken voor de neuronenbundel
In tabel 3.2 staan de parameterwaarden die we in de literatuur hebben gevonden[22][23][24].
Tmax is de simulatietijd. Aangezien deze waarden kunnen variëren, gaan we nagaan in sectie 3.8 hoe de membraanpotentiaal verandert indien een parameter gewijzigd wordt.
De waarden uit tabel 3.2 zijn de eigenschappen van één neuron en de vraag is nu of deze
eigenschappen ook geldig zijn voor een bundel neuronen. We zullen later zien dat naburige
neuronen een zéér beperkte invloed hebben op elkaar. Aangezien we ons hier beperken
tot witte materie kunnen deze parameters inderdaad gebruikt worden voor dit onderzoek.
Tabel 3.2: Waarden van de gebruikte parameters
Gebruikte waarden
Parameter
Eenheid
Waarde
Rm
Cm
Ra
a
L
T max
Ωm2
23
0.009
0.354
5·10−6
0.05
0.03
F/m2
Ωm
m
m
s
31
Hoofdstuk 3. Het passieve model
We kunnen stellen dat de berekende membraanpotentiaal zal optreden voor alle neuronen
in de desbetreffende bundel.
3.4
Oplossingen van de analytische methode
Eerst gaan we de kabelvergelijking analytisch oplossen met als doel deze oplossingen later
te vergelijken met die van de numerieke methode. Aangezien het gaat om een partiële
differentiaalvergelijking zullen er bepaalde aannames gemaakt worden. We gaan hier niet
het elektrische veld als input gebruiken, maar een random gekozen spanning of stroombron.
We herschrijven de kabelvergelijking voor de duidelijkheid:
∂Vm
1 ∂ 2 Vm
1
·
= cm ·
Vm
+
2
ra ∂x
∂t
rm
(3.2)
We overlopen nu drie veralgemeningen, namelijk de isopotentiaal methode, de ’steady
state’ methode, en de impulsrespons methode.
3.4.1
De isopotentiaal methode
2
Isopotentiaal wijst erop dat de oplossing onafhankelijk is van de lengte( ∂∂xV2m = 0)[25].
Vergelijking 3.2 wordt zo herleidt tot:
0 = cm ·
1
∂V
+
Vm
∂t
rm
(3.3)
Indien er op tijdstip t = 0 een stroominjectie Istim plaatsvindt voor t1 seconden, wordt
vergelijking 3.3:
∂V
Vm
+
=C
∂t
τ
(3.4)
t
De oplossing van deze vergelijking is: V (t) = A · e− τ + C, waar A en C constanten zijn.
Deze waarden kunnen gevonden worden via de randvoorwaarden V (0) = Vrust = 0 en
V (∞) = Istim · RM , met RM = rm /L, met L de lengte van de neuronenbundel. We krijgen
nu: A = −Istim · RM en C = Istim · RM . Vergelijking 3.4.1 geeft de oplossing van de
differentiaalvergelijking. Wanneer de stimulatie wegvalt na t1 s wordt C nul en moet de
constante A opnieuw berekend worden. Op tijdstip t1 vinden we de beginsituatie van de
t1
nieuwe vergelijking; we vinden: A = Istim · RM (e τ − 1). We gebruiken Istim = 1 mA als
input voor een bepaalde tijd t1 = 7.5 ms en een waarde voor Rm van 0.23 Ωm2 om het
verloop van Vm duidelijk te zien.
t
V(t)=Istim · Rm · (1 − e− τ )
, t <t1
32
Hoofdstuk 3. Het passieve model
(3.5)
t1
(3.6)
t
V(t)=Istim · Rm · (e τ − 1) · e− τ
, t≥ t1
Op figuur 3.6 zien we dat na 7.5 ms, de membraanpotentiaal terugkeert naar zijn originele
rusttoestand volgens een exponentieel dalend verloop.
3.4.2
De ’steady state’ oplossing
’Steady state’ betekent dat de oplossing onafhankelijk is van de tijd( ∂V∂tm = 0), waardoor
de kabelvergelijking vereenvoudigd wordt tot:
1
1 ∂ 2 Vm
=
·
Vm
ra ∂x2
rm
(3.7)
Als beginvoorwaarde gebruiken we V (0) = 1 V. We krijgen:
V (x) = V (0) · e
−x
λ
(3.8)
Op figuur 3.7 staat deze oplossing afgebeeld.
3.4.3
Impulsresponsie
Indien we nu aannemen dat de membraanpotentiaal evenredig is met een exponentieel
dalende tijdsafhankelijke factor bekomen we:
Vm (X, T ) = W (X, T ) · e−T
,X =
x
t
,T =
λ
τ
(3.9)
De aanpassing naar X en T zorgt voor een normalisatie op de lengteconstante λ en op de
tijdsconstante τ .
Indien we dit invullen in de kabelvergelijking krijgen we:
∂2W
∂W
=
2
∂X
∂T
(3.10)
Deze differentiaalvergelijking is zéér gelijkaardig aan de 1D-diffusievergelijking[25]:
D·
∂ 2 c(x, t)
∂c(x, t)
=
2
∂x
∂t
(3.11)
Hoofdstuk 3. Het passieve model
Figuur 3.6: Analytische oplossing van de isopotentiaal methode
Figuur 3.7: Analytische oplossing van de ’steady state’ methode
33
34
Hoofdstuk 3. Het passieve model
met D een diffusiecoëfficient(m2 /s) en c de concentratie(mol/l). De uiteindelijke oplossing
van de kabelvergelijking is gelijkaardig aan de oplossing van de diffusievergelijking:
Vm (0, 0)
Vm (x, t) = p
·e
(4πT )
−x2
λ
4 τt
t
· e− τ
(3.12)
Op figuren 3.8 en 3.9 staan respectievelijk de tijd-en ruimteafhankelijkheid afgebeeld van
de membraanpotentiaal na respectievelijk 0.625 cm en 1.9 ms.
3.5
Oplossingen van de numerieke methode
De kabelvergelijking is een partiële differentiaalvergelijking wat wil zeggen dat de vergelijking partiële afgeleiden bevat van een functie naar, in dit geval, twee variabelen, de tijd en
de ruimte. Om de kabelvergelijking op te lossen gebruiken we numerieke methoden, met
name de methode van Crank-Nicolson, voorwaartse Euler en achterwaartse Euler. Voorwaartse Euler is een expliciete methode, de toestand van een systeem op een later tijdstip
wordt berekend uit de huidige toestand. Achterwaartse Euler is een impliciete methode,
waarbij een vergelijking opgelost moet worden waarin zowel de huidige als de volgende
toestand aanwezig is. Crank-Nicolson is een gemiddelde van deze twee oplossingen. We
beginnen opnieuw met de kabelvergelijking:
∂Vm
1
1 ∂ 2 Vm
·
= cm ·
+
Vm
2
ra ∂x
∂t
rm
(3.13)
We verdelen de neuronbundel in N ruimtestappen en bekijken T opeenvolgende tijdstappen, met als gevolg dat onze oplossing Vm een NxT matrix zal zijn. Nu bekijken we Vm op
elke tijd-en ruimtestap en passen we hierbij de numerieke methode toe. In het algemeen
beschouwen we een neuron van lengte L en bekijken we het verloop van de potentiaal Vm
onder een bepaalde stimulus voor een totale tijd Tmax seconden. Vlt is de membraanpotentiaal op tijdstip t en plaats l langs het neuron. t loopt dus van 0 tot Tmax en l loopt van
0 tot L. Zoals gezegd hebben we N ruimtestappen en T tijdstappen waardoor de grootte
L
en ∆t = Tmax
van elke tijd-en ruimtestap bepaald wordt door: ∆l = N
T . We krijgen nu
volgens de formules van voorwaartse Euler [26]:
Vm = Vlt
(3.14)
V t+1 − Vlt
∂Vm
= l
∂t
∆t
(3.15)
t − 2V t + V t
Vl−1
∂ 2 Vm
l
l+1
=
2
2
∂x
∆l
(3.16)
Een tweede manier is via achterwaartse Euler, wat een kleine aanpassing geeft in de formules [26]:
Hoofdstuk 3. Het passieve model
Figuur 3.8: Analytische oplossing van de impulsrespons methode - i.f.v. tijd
Figuur 3.9: Analytische oplossing van de impulsrespons methode - i.f.v. afstand
35
36
Hoofdstuk 3. Het passieve model
Vm = Vlt+1
(3.17)
V t+1 − Vlt
∂Vm
= l
∂t
∆t
(3.18)
t+1
t+1
Vl−1
− 2Vlt+1 + Vl+1
∂ 2 Vm
=
∂x2
∆l2
(3.19)
De Crank-Nicolson methode is een gemiddelde van de voorgaande methoden [26]:
Vm =
Vlt + Vlt+1
2
(3.20)
V t+1 − Vlt
∂Vm
= l
∂t
∆t
(3.21)
t+1
t+1
t − 2V t + V t )
(Vl−1
− 2Vlt+1 + Vl+1
) + (Vl−1
∂ 2 Vm
l
l+1
=
∂x2
2∆l2
(3.22)
Algemeen geldt dat de voorwaartse methode vooral gebruikt wordt bij eenvoudigere vergelijkingen en aangezien deze methode ook het minst stabiel is van de drie gaan we in verdere
besprekingen enkel achterwaartse Euler en Crank-Nicolson gebruiken. De code is geschreven voor beide methoden, maar in de tekst gaan we ervan uit dat we de Crank-Nicolson
methode gebruiken.
We vullen de formules van Crank-Nicolson in, in de kabelvergelijking 3.2 en werken deze
verder uit tot alle waarden van de volgende tijdstap aan de linkerkant staan en alle waarden van de huidige tijdstap
q aan de rechterkant(vergelijking 3.24). In de kabelvergelijking
x
gebruiken we ook λ = rrma en τ = rm · cm . We zien dat een extra term λ2 ∂
∂x verschijnt
aan de rechterkant van de vergelijking. Dit is de activatiefunctie, waarbij enkel rekening
wordt gehouden met de parallelle component van het elektrische veld.
λ2
t+1
t+1
t − 2V t + V t )
) + (Vl−1
(Vl−1
− 2Vlt+1 + Vl+1
Vlt + Vlt+1
Vlt+1 − Vlt
∂El
l+1
l
−
=
τ
+ λ2
2
2∆l
2
∆t
∂l
(3.23)
t+1
Vl−1
λ2
2∆l2
2 τ
λ
λ2
1
t+1
+
− 2− −
+ Vl+1
=
∆l
2 ∆t
2∆l2
λ2
λ2
1
τ
λ2
∂El
t
t
t
Vl−1 −
+ Vl
+ −
+ Vl+1 −
+ λ2
2
2
2
2∆l
∆l
2 ∆t
2∆l
∂l
Vlt+1
A · V t+1 = B · V t − I t
(3.24)
(3.25)
V t is een Nx1 vector die één kolom van matrix Vm voorstelt en alle potentiaalwaarden
van elk ruimtestap op tijdstip t bevat. A en B zijn N x N diagonaal matrices die enkel
37
Hoofdstuk 3. Het passieve model
van nul verschillende waarden op de drie centrale diagonalen bevatten ,zoals te zien is op
figuur 3.10 voor matrix A. Matrix B heeft een gelijkaardige vorm. Via vergelijkingen 3.24
en 3.25 en onderstaande definities van d1 , d2 en d3 kunnen we ai,j en bi,j bepalen.
d1 =
d2 = −
d3 =
λ2
2∆l2
λ2
1
τ
− −
2
∆l
2 ∆t
λ2
1
τ
+ −
2
∆l
2 ∆t
(3.26)
(3.27)
(3.28)
We vinden dat ai,i = d2 en ai,i−1 = ai,i+1 = d1 voor i gaande van 2 tot N-1. Voor matrix B
vinden we dat bi,i = d3 en bi,i−1 = bi,i+1 = −d1 voor i gaande van 2 tot N-1. De waarden
op de eerste en de laatste rij worden bepaald door de randvoorwaarden, wat later aan bod
komt.
De vector I t is een Nx1 vector en bevat de stimulatie waarden op tijdstip t op elke ruimtestap. Dit wordt berekend via de activatiefunctie:
Ilt = λ2 ·
t
t
− El−1
El+1
2∆x
(3.29)
De tijdsduur van een kolom wordt bepaald door Tmax
T , wat de minimale duur is dat het
elektrische veld aangelegd kan worden. Al deze kolommen komen terecht in een ’stim’
matrix. Deze NxT matrix bepaalt de volledige stimulatie op het neuron. Om de volledige
matrix Vm te bepalen, itereren we vergelijking 3.25 tot alle tijdskolommen gevonden zijn.
We moeten ook opletten welke randvoorwaarden we gebruiken. Hierbij vragen we ons af
waar de geı̈nduceerde stroom naartoe gaat aan de uiteinden van de neuronenbundel. Wij
gebruiken de ’sealed end’ randvoorwaarden, ook wel de Von Neumann randvoorwaarden
Figuur 3.10: Vorm van matrix A en B
38
Hoofdstuk 3. Het passieve model
genoemd. Dit wil zeggen dat er geen stroom kan weglekken langs de twee uiteinden van
het neuron. In het algemeen geldt dat I0 en IL , de axiale stromen aan de uiteinden van
t = V t en V t
t
het neuron, nul gaan zijn indien V−1
0
N +1 = VN en dit voor alle waarden van t.
Dit is volgens de randvoorwaarde:
∂Vm (x, t)
∂Vm (x, t)
|x=0 =
|x=L = 0
∂x
∂x
(3.30)
Helaas werkt dit systeem niet goed omdat, indien I0 en IL negatief zijn, een extra stroombron gecreëerd zal worden, wat een ’phantomcurrent’ wordt genoemd[27]. Dit kan vermeden worden via het gebruik van Taylor reeksen. We hebben:
VNt +1 = VNt + ∆l ·
∂Vm
∆l2 ∂ 2 Vm
|x=L +O(∆x3 )
|x=L +
·
∂x
2
∂x2
(3.31)
Indien we de methode van achterwaartse Euler gebruiken, krijgen we:
VNt +1 + VNt −1 − 2VNt
∂ 2 Vm (x = L, t)
=
∂x2
∆l2
(3.32)
∂Vm (x = L, t)
=0
∂x
(3.33)
De combinatie van vergelijkingen 3.31 - 3.33 geeft nu:
VNt +1 = VNt −1 + O(∆x3 )
(3.34)
t = V t en V t
t
Bijgevolg moet V−1
1
N −1 = VN +1 om aan de ’sealed end’ randvoorwaarden te
voldoen[27]. We vinden voor de matrix A dat a1,1 = aN,N = d2 en a1,2 = aN,N −1 = 2d1 .
Voor matrix B vinden we dat b1,1 = bN,N = d3 en b1,2 = bN,N −1 = −2d1 .
Vm wordt weergegeven in figuur 3.11 voor een zenuw gelegen op de z-as, en in figuur
3.12, voor een bundel met α = π3 en θ = π3 . Voor beide bundels werd het elektrische
veld aangelegd voor 7.5 ms. Dit type figuren geeft de membraanpotentiaal(volt) weer
in een kleurcode aan de rechterkant in functie van de tijd en de ruimte. Op figuur 3.11
is de afhankelijkheid van Vm van het weefsel duidelijk te zien. De grootste hyper-en
depolarisaties vinden immers plaats aan de weefselovergangen.
39
Hoofdstuk 3. Het passieve model
Figuur 3.11: Vm voor een bundel gelegen op de z-as
Figuur 3.12: Vm voor een bundel met α =
π
3
en θ =
π
3
40
Hoofdstuk 3. Het passieve model
3.6
Vergelijking met de analytische methode
We gaan nu onze numerieke oplossing vereenvoudigen naar de drie aannames van de analytische methode zodat we de resultaten kunnen vergelijken.
3.6.1
De isopotentiaal methode
Hier geldt dat de membraanspanning onafhankelijk is van de afstand. A en B uit formule
3.25 worden:
τ
1
−
∆t 2
τ
1
B=−
+
∆t 2
A=−
(3.35)
(3.36)
Zowel de numerieke als de analytische oplossingen zijn identiek(figuur 3.6).
3.6.2
De ’steady state’ methode
Indien we de methode van Crank-Nicolson(vergelijkingen 3.20 tot 3.22) toepassen op vergelijking 3.7 krijgen we:
Vl+1
∆x2
· Vl − Vl−1 ;
= 2+ 2
λ
(3.37)
Op afbeelding 3.13 zijn beide plots te zien, de analytische methode staat in het blauw, de
numerieke oplossing in het rood. De oplossingen komen ook hier overeen.
3.6.3
De impulsresponsie methode
Voor deze methode kunnen we onze volledige numerieke oplossing vergelijken met de analytische. Voor de duidelijkheid van de figuur gebruiken we nu even een specifieke axiale
weerstand van 3.54 Ωm en een specifieke membraanweerstand van 2.3 Ωm2 . De figuren 3.14 en 3.15 tonen aan dat de vergelijking enkel geldt mits een herschaling in zowel
het tijdsafhankelijke als het ruimteafhankelijke verloop. Deze amplitudefout is afkomstig
van de aanname dat de membraanpotentiaal evenredig is met een exponentieel dalende
factor(vergelijking 3.9).
3.7
3.7.1
Vergelijking met de simulatie-omgeving neuron
Introductie tot neuron
Neuron is een simulatie-omgeving, ontworpen door de universiteit van Yale, om neuronen
en netwerken van neuronen te modelleren en op te lossen onder een bepaalde stimulans.
Voor de differentiaalvergelijkingen gebruikt Neuron de impliciete Euler methode[28]. De
code gebruikt een syntax die zeer verwant is met C en hanteert dezelfde randvoorwaarden
Hoofdstuk 3. Het passieve model
Figuur 3.13: Vergelijking van de ’steady state’ methode, numeriek versus analytisch
Figuur 3.14: Vergelijking impulsresponsie methode voor tijdsafhankelijkheid
41
Hoofdstuk 3. Het passieve model
42
Figuur 3.15: Vergelijking impulsresponsie methode voor plaatsafhankelijkheid
als wij, namelijk ’sealed end’. Waar Neuron vooral gebruikt wordt om dendritische bomen
te ontwerpen, en deze dan te stimuleren met stroom-of voltklampen, gaan wij, in onze
code, ons focussen op het model van een neuronenbundel om dit vervolgens in detail te
bestuderen onder invloed van een elektrisch veld. In deze sectie wordt gekeken of de
oplossingen van ons model overeenkomen met een equivalent model in Neuron.
3.7.2
Locale stroominput
We beginnen met een lokale stroom Istim aan te leggen van 1 nA midden in het neuron,
op een afstand van 2.5 cm van beide uiteinden.
In Neuron maken we nu een axon, met de parameters uit tabel 3.2, en leggen Istim aan op
dezelfde locatie als daarnet. De code van Neuron vindt u in appendix B. We zien in figuur
3.16 dat, zowel in de tijd als in de ruimte, de code(rood) en Neuron(groen) overeenkomen.
3.7.3
Continue stroominput
Nu leggen we het elektrische veld aan voor 7.5 ms. We geven de stimulatiematrix stim door
aan Neuron, die een kleine stroominjectie geeft aan elke ruimtestap volgens vergelijking
3.29. Figuur 3.17 geeft dezelfde gegevens weer als figuur 3.16, maar nu voor het elektrische
veld als input. Voor de tijdsafhankelijkheid zien we een kleine amplitudefout van ongeveer
0.02 mV. Deze fout kan veroorzaakt zijn door afrondingsfouten.
43
Hoofdstuk 3. Het passieve model
(a) tijdsafhankelijkheid
(b) plaatsafhankelijkheid
Figuur 3.16: Vergelijking neuron en eigen code voor een locale stroominjectie
Hoofdstuk 3. Het passieve model
(a) tijdsafhankelijkheid na 2.5 cm
(b) plaatsafhankelijkheid na 15 ms
Figuur 3.17: Vergelijking neuron en eigen code voor het elektrische veld
44
Hoofdstuk 3. Het passieve model
3.8
3.8.1
45
Invloed van de parameters van het model
Inleiding
Wat gebeurt er nu met Vm wanneer we bepaalde parameters variëren? De inputvariabelen
van het model zijn de ruimtehoeken θ en α, de membraanweerstand en capaciteit, de
weerstand van het cytoplasma, en de straal van de neuronenbundel. Voor elke parameter
zullen we een realistische set van waarden onderzoeken.
3.8.2
De ruimtehoeken α en θ
We onderzoeken eerst wat er gebeurt indien we de bundel 2π roteren over de ruimtehoeken.
We gebruiken de originele dataset uit tabel 3.2 en roteren α over 2π terwijl θ een constante
waarde behoudt van 0. In het andere geval blijft α constant op π/2 en roteren we θ over
2π. Voor de variatie van α en θ hebben we voor Vm een vaste kleurcode gebruikt van
respectievelijk [-2 mV:2 mV] en [-20 mV:20 mV] om de maxima en de minima goed te
kunnen volgen.
Het verloop voor α en θ is respectievelijk te zien op figuur 3.18 en 3.19. We zien dat de
verdeling afhankelijk is van het elektrische veld en dat de grensgebieden tussen de hyper-en
depolarisaties vaak op een grensvlak liggen tussen verschillende weefsels, wat duidt op het
belang van weefseleigenschappen bij de stimulatie van neuronenbundels.
Figuur 3.18: Vm voor een variabele α
Hoofdstuk 3. Het passieve model
46
Figuur 3.19: Vm voor een variabele θ
3.8.3
De membraanweerstand en capaciteit
De membraanweerstand en de membraancapaciteit vormen de eigenschappen van het
membraan. In [22] zien we dat de specifieke membraancapaciteit van verschillende neuronen geschat is via ’voltage clamp’ technieken op 0.9 µF/cm2 . Dit geldt voor zowel
corticale pyramidale neuronen, neuronen in het ruggenmerg en hippocampale neuronen.
Ook het toevoegen van proteı̈nen aan het membraan heeft weinig effect op deze waarde.
De aanwezigheid van myeline doet deze waarde daarentegen wel variëren. We gebruiken
nu een interval tussen 0.001 en 0.1 10−3 F/m2 om de invloed van de specifieke capaciteit
aan te tonen.
Op figuur 3.20 zien we dat bij een stijgende Cm , de membraanpotentiaal zich minder zal
verspreiden over de lengte en het maximum ook begint te dalen overal langs het neuron.
Dit is logisch aangezien een hogere specifieke capaciteit tot gevolg heeft dat er meer elektrische lading kan opgeslagen worden vooraleer een stroom door de weerstand begint te
lopen. In formule 2.13 zien we ook dat een hogere specifieke capaciteit leidt tot een lagere
membraanimpedantie wat leidt tot een lagere membraanpotentiaal.
In [24] zien we dat de specifieke membraanweerstand bepaald wordt door het type neuron
en de leeftijd. We gebruiken een interval tussen 1 en 50 Ωm2 .
We zien op figuur 3.21 dat hoe hoger de specifieke membraanweerstand Rm is, hoe sneller
een bepaald maximum bereikt wordt en hoe langer dit aanblijft. De membraanpotentiaal
wordt ook meer uitgebreid in de lengte. We merken hierbij op dat een hoge weerstandswaarde leidt tot een hoge impedantiewaarde en dus een hogere membraanpotentiaal. De
stroom zal ook meer geneigd zijn om axiaal te lopen, waardoor de membraanpotentiaal
zich sneller kan uitbreiden over de lengte.
Hoofdstuk 3. Het passieve model
47
Figuur 3.20: Vm voor Cm = 0.01, 0.02 en 0.05 F/m2
Figuur 3.21: Vm voor Rm = 5, 12 en 20 Ω · m2
3.8.4
De axiale weerstand
Via elektrofysische technieken is de specifieke axiale weerstand van het cytoplasma van
kreeften geschat tussen 0.1 en 1 Ωm[29].
Op figuur 3.22 zien we dat een hogere specifieke axiale weerstand leidt tot een kleinere
Vm . Deze gaat zich ook minder verspreiden over de lengte. Dit betekent dat bij een hoge
axiale weerstand er minder stroom gaat lopen door het axoplasma. Dit komt overeen met
de verwachtingen
aangezien we weten dat een grotere Ra overeenkomt met een kleinere
q
aRm
λ(λ =
2Ra ).
Hoofdstuk 3. Het passieve model
48
Figuur 3.22: Vm voor Ra = 0.3, 0.6 en 1.5 Ω · m
3.8.5
De straal
De straal van een neuron kan variëren tussen 1 en 100µm, afhankelijk van het type neuron
en de plaats in de hersenen[30].
We zien op figuur 3.23 dat hoe groter de straal van de bundel is, hoe gladder het verticale
patroon wordt tijdens het stijgen van de membraanpotentiaal, wat duidt op een grotere
axiale stroom. Aangezien τ onafhankelijk is van a, vinden we inderdaad dat vooral over
de lengte een verandering optreedt. Hoe groter a, hoe groter λ wat tot gevolg heeft dat
er meer stroom zal lopen doorheen het axon, waardoor de potentiaal zich dus verder zal
uitdeinen richting de uiteinden van de neuronenbundel.
Figuur 3.23: Vm voor a = 0.6, 6 en 60 µm
3.9
3.9.1
Uitbreidingen van het model
De aanwezigheid van myeline
Hoe beı̈nvloedt myeline de generatie van een membraanpotentiaal onder een elektrisch
veld? We passen de code aan volgens de vergelijkingen uit sectie 2.6.2. We weten dat de
membraanweerstand en de capaciteit van myeline respectievelijk ongeveer 10 keer groter
en 100 keer kleiner zijn dan de waarden uit tabel 3.2[31]. Zoals vermeld zal het elektrische
Hoofdstuk 3. Het passieve model
49
veld enkel een rechtstreekse invloed hebben op de bundel ter hoogte van de nodes van
Ranvier. Hier gebruiken we een afstand van 2.5 mm tussen de nodes en een lengte van
125 µm voor de node van Ranvier zelf. Op figuur 3.24 staat bovenaan de verdeling van
de membraanpotentiaal zonder myeline en onderaan met myeline.
We zien dat de membraanpotentiaal lager is bij een neuronenbundel met myeline. Dit is
omdat het elektrische veld enkel een potentiaalverandering kan induceren aan de nodes
van Ranvier, de bundel is dus voor een groot stuk ongevoelig voor de stimulatie. We zien
ook dat de hyperpolarisatie in het midden, en in mindere mate de depolarisatie op beide
uiteinden, zich meer gaan verspreiden over de lengte. Dit is zoals verwacht, aangezien
myeline de conductiesnelheid van membraanpotentialen dient te verhogen.
3.9.2
Het effect van een bocht
Tot nu toe werden enkel rechte zenuwbundels gestimuleerd tussen de thalamus en de cortex. Uiteraard komen ook veel gebogen bundels in de hersenen voor en men kan zich nu
afvragen of dit een groot effect zal hebben op de verdeling van de membraanpotentiaal
langs de axonen. We brengen scherpe bochten niet in rekening aangezien alle grote zenuwbundels in de hersenen enkel bochten hebben met een relatief grote hoek (figuur 2.4).
We berekenen nu de potentiaalverdeling langs een bocht door het elektrische veld op een
correcte manier te interpoleren zodat de bocht mee in rekening wordt gebracht. De code
om het veld te berekenen langs een rechte kan opnieuw gebruikt worden, indien we de
bocht opsplitsen in verschillende rechte stukken. Op figuur 3.25 is een zenuw afgebeeld
die langs de thalamus loopt in het yz-vlak. Op figuur 3.26 staat de overeenkomende membraanspanning afgebeeld, waarop te zien is hoe de membraanspanning op bepaalde punten
in de bocht sneller stijgt, afhankelijk van het elektrische veld.
Figuur 3.25: De ligging van een zenuw rond de thalamus
50
Hoofdstuk 3. Het passieve model
(a) zonder myeline
(b) met myeline
Figuur 3.24: Vm voor een model met en zonder myeline
51
Hoofdstuk 3. Het passieve model
Figuur 3.26: De membraanspanning van een zenuw in een bocht rond de thalamus
De extra depolarisaties ontstaan omdat de bocht dicht bij de weefselovergang ligt tussen
de thalamus en de witte materie.
3.9.3
Invloed op andere zenuwbundels
Als laatste uitbreiding onderzoeken we hoe een gestimuleerde bundel, een nabijgelegen
bundel beı̈nvloedt. De stroom door de gestimuleerde bundel zal een lading creëren aan
het oppervlak van het membraan. De verdeling van de membraanpotentiaal van deze eerste
bundel is te zien in figuur 3.27. Deze lading zal een elektrisch veld opwekken wat de tweede
bundel extra stimuleert. Hoe bepalen we dit extra elektrische veld nu? We bekijken eerst
een segment k van de gestimuleerde neuronenbundel en zien daar dat een membraanstroom
Im weglekt langs het membraan per ∆t, wat wil zeggen dat per segment k een lading Qk
gecreëerd wordt, met Qk = Im .∆t. De breedte van segment k wordt gegeven door ∆x en
de membraanpotentiaal door Vm,k . We kennen ook de membraanimpedantie z wat ons tot
de volgende formules brengt:
Vm,k
· ∆t
Qk =
z
met
z=
rm
∆x
rm
1 + scm ∆x ∆x
Qk = cm ∆x(Vm,k − Vm,k−1 ) +
(3.38)
Vm,k ∆t
rm
∆x
(3.39)
Vergelijking 3.39 bepaalt de lading per lengte-éénheid aan het oppervlak. We beschouwen
het cilindrisch model als een Gauss oppervlak en berekenen het opgewekte elektrische veld
52
Hoofdstuk 3. Het passieve model
volgens:
Ek =
Qk
2πr12
(3.40)
met r12 de afstand tussen beide bundels, en de permittiveit van het weefsel. Het originele
elektrische veld, van een orde 0.005 V/m, induceert, met de parameterwaarden uit tabel
3.2, een membraanpotentiaal van de orde 10−1 volt. Indien we bovenstaande formules nu
toepassen op 2 bundels die 10 µm van elkaar liggen, bekomen een extra elektrisch veld
van de orde 10−4 V/m, zoals te zien is op figuur 3.28.
Figuur 3.27: De membraanspanning van een zenuw op de y-as
Hoofdstuk 3. Het passieve model
53
Figuur 3.28: Het elektrische veld opgewerkt door een zenuw op een afstand van 10 µm
We gaan ervan uit dat de invloed van een neuronenbundel op een nabijgelegen zenuw
verwaarloosbaar is.
Hoofdstuk 4
Het actieve model
4.1
Inleiding
In het vorige hoofdstuk hebben we gezien dat bij het passieve model een geı̈nduceerde
membraanpotentiaal na een relatief kleine afstand snel exponentieel zal dalen naar zijn
evenwichtstoestand. Indien deze excitaties te klein zijn, zal het axon geen neurotransmitter vrijlaten aan zijn uiteinde, waardoor de informatie niet kan doorgegeven worden
aan het volgende neuron. Wat is de werking indien de excitaties over een langere afstand
getransporteerd moeten worden? Voor lange afstanden zal een axon een actiepotentiaal
genereren indien de initiële excitatie groot genoeg is. Om dit in te zien moeten we bepaalde eigenschappen van het membraan mee in rekening brengen, wat ons brengt tot het
actieve model.
Eerst geven we een theoretische achtergrond van deze nieuwe membraaneigenschappen,
en verklaren we hoe de vergelijkingen van het actieve model tot stand komen. Vervolgens
bekijken we de numerieke oplossingen van het model en vergelijken we deze met het simulatiepakket Neuron. Op het einde van dit hoofdstuk bekijken we ook de verschillende
eigenschappen van het actieve model en de extra uitbreidingen, gelijkaardig aan hoofdstuk
3.
4.2
De generatie van actiepotentialen
Actiepotentialen kenmerken het actieve model, maar wat zijn deze actiepotentialen en
hoe worden ze gegenereerd? Het neuron bevat langs zijn membraan talrijke ionenkanalen
die reageren op kleine spanningsveranderingen. Wanneer deze kanalen geopend worden
ontstaat er een piek in de membraanspanning, genaamd de actiepotentiaal, met een grootte
van 100 mV 2 tot 3 ms lang.
Een actiepotentiaal zal niet dalen in amplitude door een regeneratie proces. In het membraan zorgt een initiële stimulus voor de creatie van een actiepotentiaal die veel groter is
dan de initiële spanningsverandering. Deze actiepotentiaal verspreidt zich dan over het
axon, en zal verderop een nieuwe actiepotentiaal genereren, wat dus leidt tot het regeneratieve gedrag. Dit proces kan opgedeeld worden in drie fases, de eerste fase is die waarbij
54
55
Hoofdstuk 4. Het actieve model
een potentiaalverandering een stroom opwekt die regio’s verderop in het neuron depolariseert, dit systeem hebben we uitvoerig besproken bij het passieve model. Bij de tweede
stap leidt deze depolarisatie tot een wijziging van de toestand van het membraan, en bij
de derde stap wordt een grotere depolarisatie gecreëerd door deze toestandsveranderingen.
De membraanveranderingen zijn in feite veranderingen van de permeabiliteit van bepaalde
ionenkanalen die in het membraan zitten. Deze permeabiliteit is de doorlaatbaarheid
van het membraan voor een bepaald ion en is niet te verwarren met de magnetische
permeabiliteit µ. De belangrijkste ionen in en buiten de cel zijn respectievelijk kalium(K),
en natrium(Na). Er zit veel kalium in de cel en weinig erbuiten en omgekeerd voor natrium.
Om dit evenwicht in stand te houden wordt natrium-kalium ATP-ase gebruikt, ook wel
de natrium pomp genoemd(figuur 4.1).
Deze pomp ruilt drie natrium ionen aan de binnenkant voor één kalium ion langs de buitenkant, wat energie kost aangezien de verplaatsing tegen de ionen hun concentratiegradiënten
gebeurt[8]. Deze energie komt in de vorm van ATP-ase, waar ATP wordt omgezet in ADP
en gaat ook gepaard met het opslagen van potentiële energie aan het membraan van de
cel.
Eerst bekijken we de derde fase, hoe een grotere depolarisatie gecreëerd wordt door het
wijzigen van de toestand van deze ionenkanalen. Indien we kalium als voorbeeld nemen,
merken we op dat er aan de binnenkant van de cel een veel hogere concentratie heerst
dan aan de buitenkant. Indien het membraan nu plots permeabel gemaakt wordt voor
deze ionen, wat eerst niet het geval was, zullen de ionen zich mee met hun concentratiegradiënt bewegen wat leidt tot een evenwicht aan beide kanten. Dit evenwicht komt tot
stand wanneer de concentratiegradiënt gelijk is aan de elektrische gradiënt, en wordt de
evenwichtsgradiënt EK van kalium genoemd. Dit is voorgesteld op figuur 4.2 tussen twee
compartimenten A en B, voor zowel kalium als chloor. EK wordt dus bepaald door de
elektrische gradiënt gelijk te stellen aan de concentratiegradiënt:
e · EK = −kT · ln
[K]int
[K]ext
Figuur 4.1: De werking van een natrium/kalium pomp
(4.1)
56
Hoofdstuk 4. Het actieve model
De linkerterm in vergelijking 4.1 is de elektrische gradiënt en de rechterterm is de concentratiegradiënt. k is de constante van Boltzmann, T de temperatuur in kelvin en e de
lading van het ion. [K]int en [K]ext is de concentratie van kalium respectievelijk binnen
en buiten de cel. Voor EK vinden we nu:
EK = −
kT
[K]int
· ln
e
[K]ext
(4.2)
Indien we hetzelfde systeem toepassen voor natrium vinden we voor EK en EN a -50 mV
en 12 mV[16]. Om de totale membraanpotentiaal te bepalen moeten we wel rekening
houden met alle permeabiliteiten van alle kanalen. Indien het membraan bijvoorbeeld
impermeabel is voor natrium of kalium zullen we een membraanpotentiaal vinden van EK
respectievelijk EN a . De permeabiliteiten PK en PN a moeten dus in rekening gebracht
worden wat gebeurt in de formule van Goldmann[13]:
E=−
kT PK [K]int + PN a [N a]int
ln
e
PK [K]ext + PN a [N a]ext
(4.3)
We zien dat Vm beı̈nvloed wordt door de twee permeabiliteiten(figuur 4.3). We hebben tot
nu verondersteld dat de rustpotentiaal telkens nul volt is. In realiteit ligt deze rustpotentiaal echter veel dichter bij EK , omwille van de rustpermeabiliteiten van kalium en natrium.
Bij rust is de permeabiliteit van kalium immers veel groter dan die van natrium, waardoor
de rustpotentiaal meer opschuift in de richting van EK . Deze rustpermeabiliteiten komen
voor in de vorm van lekkanalen, het permanent weglekken van ionen langs het membraan
waarop het neuron natrium-kalium ATP-ase zal gebruiken om het evenwicht in stand te
houden. Een derde ion dat vaak voorkomt is chloor, maar aangezien de evenwichtspotentiaal van chloor(Cl) zeer dicht gelegen is bij de rustpotentiaal kan deze invloed verwaarloosd
worden.
Figuur 4.2: Het ontstaan van een evenwichtspotentiaal in twee compartimenten A en B[32]
Hoofdstuk 4. Het actieve model
57
Figuur 4.3: De twee permeabiliteiten die de membraanspanning beı̈nvloeden
Dankzij het werk van Hodgkin en Huxley[2] weet men dat onder een bepaalde depolarisatie
de permeabiliteit van natrium eerst stijgt en vervolgens snel weer daalt(figuur 4.4)([2]).
PK stijgt iets later om vervolgens rustig naar zijn evenwichtswaarde te dalen. Op figuur
4.4 zien we de gecreëerde actiepotentiaal, de snelle stijging richting EN a , gevolgd door een
daling, met een ’undershoot’ richting EK , om tenslotte tot rust te komen op de rustpotentiaal.
Om deze werking te modelleren, moeten we eerst begrijpen hoe deze spanningsgestuurde
ionenkanalen werken. Wanneer we zo een kanaal van dichterbij bekijken, zien we dat het
pas zal openen als bepaalde moleculen samen de blokkage opheffen. Dit gedrag wordt
voorgesteld door een bepaalde kans, afhankelijk van het type kanaal. Een depolarisatie
van het membraan doet deze kans sterk toenemen. Er is experimenteel aangetoond dat
het kaliumkanaal opent indien vier moleculen de blokkage opheffen, en aangezien er maar
één molecule nodig is om de blokkage te herstellen zal het kanaal hierna snel sluiten. Het
natriumkanaal wordt maar geblokkeerd door drie moleculen, wat ook de reden is dat de
permeabiliteit van natrium sneller stijgt dan die van kalium. Het natriumkanaal wordt na
de opening geı̈nactiveerd. Dit laatste wordt veroorzaakt door een vierde molecule die zich
vestigt op het kanaal waardoor dit sluit en even niet meer geopend kan worden[13].
4.3
4.3.1
Eigenschappen van actiepotentialen
De drempelspanning
De drempelspanning VT is de minimale waarde van de membraanspanning waarbij een
actiepotentiaal gegenereerd wordt. Deze waarde wordt bepaald door de wisselwerking
tussen de natrium-en kaliumpermeabiliteit. PN a zorgt voor positieve feedback; hoe meer
het membraan depolariseert, hoe meer de permeabiliteit van de natriumkanalen verder
stijgt. PK daarentegen zorgt voor negatieve feedback; een depolarisatie zorgt ervoor
dat PK stijgt, wat tot gevolg heeft dat er minder depolarisatie optreedt. Tot een bepaalde potentiaalwaarde zijn deze twee feedbacksystemen in evenwicht, maar vanaf deze
drempelwaarde zal de positieve feedback overnemen wat leidt tot een actiepotentiaal. De
waarde van de drempelspanning VT wordt dus bepaald door de permeabiliteiten van beide
Hoofdstuk 4. Het actieve model
58
Figuur 4.4: Het verloop van een actiepotentiaal + de verandering van permeabiliteiten
van kalium en natrium[33]
ionenkanalen[13].
4.3.2
De refractaire periode
Zoals gezegd worden de natriumkanalen na het openen tijdelijk geı̈nactiveerd. De tijd
dat deze kanalen zich niet meer kunnen openen en er geen actiepotentialen gecreëerd
kunnen worden, wordt de absolute refractaire periode genoemd. In deze periode zijn alle
natriumkanalen gesloten. Er is ook een langere relatieve refractaire periode waar er enkel
een actiepotentiaal kan gegenereerd worden indien er een hogere depolarisatie voorkomt
dan normaal. De drempelspanning is in dit gebied dus hoger omdat nog een deel van de
natriumkanalen gesloten zijn. Wetende dat een actiepotentiaal een stroom teweeg brengt
in beide richtingen van het axon, is deze periode zeer belangrijk, aangezien het membraan
anders permanent gedepolariseerd zou zijn[13].
4.3.3
Accomodatie
Aangezien de natriumkanalen sneller reageren dan die van kalium is het voor de stimulatie
van een zenuw beter om te werken met een snellere excitatie. Dit is vooral duidelijk
indien men werkt met een stap input, waar de excitatie verhoogt wordt in verschillende
stappen. Bij elke stap zal het moeilijker worden om een actiepotentiaal te genereren
door de accommodatie van de verschillende permeabiliteiten. Dit is omdat PK zal blijven
stijgen bij verdere trapverhogingen, terwijl PN a snel daalt om bij de volgende trap weer in
59
Hoofdstuk 4. Het actieve model
mindere mate te stijgen door de hogere graad van natrium inactivatie. Indien de stimulus
dus traag wordt aangelegd zal het systeem zich aanpassen aan deze stimulatie waardoor de
drempelspanning stijgt en een actiepotentiaal moeilijker gegenereerd kan worden. Op een
bepaald punt zal dit zelfs onmogelijk zijn, wat totale accommodatie wordt genoemd[13].
4.3.4
De ’all-or-nothing’ wet
Een laatste eigenschap van de actiepotentiaal is dat hij altijd dezelfde vorm heeft. Dit is
het gevolg van het regeneratieve proces waarbij actiepotentialen zich voortplanten. Indien
op een bepaalde plaats een hoge depolarisatie plaatsvindt, zal een grote actiepotentiaal gegenereerd worden, maar aangezien dit proces zich talrijke keren herhaalt langs het neuron,
zal van de initiële depolarisatie weinig overblijven. Door het regeneratieve proces steeds
te herhalen herleidt een grote actiepotentiaal zich dus tot de standaardvorm[13].
4.4
De vergelijkingen van Hodgkin en Huxley
Hoe zetten we al deze informatie nu om in wiskundige formules? We beginnen bij het
passieve model en kijken wat voor nieuwigheden erbij komen. In het membraan houden
we nu ook rekening met de ionenkanalen voor kalium, natrium en een lekkanaal waar
ionen vrij door kunnen transporteren. De evenwichtspotentialen, die berekend worden via
formule 4.2 worden voorgesteld door spanningsbronnen, in serie met de conductiviteit van
elk kanaal. Zo krijgen we het schema op figuur 4.5.
De geleidbaarheid wordt bepaald door de permeabiliteit van het kanaal. Deze permeabiliteit hangt af van de moleculen die het desbetreffende kanaal blokkeren, deblokkeren
of inactiveren. Er zijn drie verschillende moleculen, elk gepaard met een kans dat de
molecule zijn taak werkelijk doet, dewelke ’gating’ variabele wordt genoemd. Het natriumkanaal zal zich openen indien drie moleculen het kanaal deblokkeren, maar wordt
daarna geı̈nactiveerd door een andere molecule. De conductiviteit GN a zal dus evenredig
zijn met m3 · h. PK wordt geregeld door vier moleculen, waardoor GK evenredig is met
n4 . Hierbij is h de kans dat een molecule de natrium poort inactiveert, m is de kans dat
een molecule wegspringt van de natrium poort en n is de kans dat een molecule wegspringt
van de kalium poort. Elk kanaal heeft ook een eigen conductiviteitsconstante gN a , gK of
gL , waardoor de totale geleidbaarheden gelijk zijn aan: GK = gK · n4 en GN a = gN a · m3 .
Het lekkanaal wordt enkel voorgesteld door een constante conductiviteit GL = gL .
De vraag is nu hoe de ’gating’ variabelen gekozen worden. We weten enkel dat deze
afhankelijk zijn van de membraanspanning Vm . Hodgkin en Huxley hebben experimenteel
aangetoond dat al deze variabelen een differentiaalvergelijking van eerste orde volgen[2]:
∂m
= αm (1 − m) − βm m
∂t
(4.4)
∂h
= αh (1 − h) − βh h
∂t
(4.5)
60
Hoofdstuk 4. Het actieve model
Figuur 4.5: Schema van het actieve model[34]
∂n
= αn (1 − n) − βn n
∂t
(4.6)
αm,h,n en βm,h,n zijn ’rate’ constanten, experimenteel bepaald door[2]:
αm =
0.1 · (∆V + 25)
e
∆V +25
10
βm = 4 · e
∆V
18
αh = 0.07 · e
βh =
αn =
−1
∆V
20
1
e
∆V +30
10
+1
0.01 · (∆V + 10)
e
∆V +10
10
−1
βn = 0.125 · e
∆V
80
(4.7)
(4.8)
(4.9)
(4.10)
(4.11)
(4.12)
met ∆V = Vrust − Vm .
Rekening houdend met het schema van figuur 4.5 en de introductie van een activatiefunctie
wordt de totale vergelijking:
a ∂ 2 Vm
∂Vm
a ∂Ex
− (gN a m3 h(Vm − EN a ) + gK n4 (Vm − EK ) + gL (Vm − EL )) = Cm
+
2
2Ra ∂x
∂t
2Ra ∂x
(4.13)
61
Hoofdstuk 4. Het actieve model
4.5
De numerieke oplossingen
Voor de numerieke oplossingen gebruiken we de waarden uit tabel 4.1[2][16].
In tegenstelling tot het passieve model hebben we nu een stelsel van differentiaalvergelijkingen. We lossen dit op via de methode van achterwaartse Euler. De vergelijkingen van
de ’gating’ variabelen volgens achterwaartse Euler zijn:
mt+1 = mt ·
αm
Dm
+
Cm
Cm
(4.14)
Met Cm = 1/∆t + αm + βm en Dm = 1/∆t.
De vergelijkingen voor n en h zijn analoog. De initiële waarden van Vm ,m,n en h zijn
bekend, zo is Vm1 de rustpotentiaal, en de initiële waarden van m, n en h kunnen bekomen
worden door ∂m,n,h
gelijk te stellen aan nul en de ’rate’ constanten te berekenen in functie
∂t
van Vrust . We krijgen:
mrust =
αm,rust
αm,rust + βm,rust
(4.15)
hrust =
αh,rust
αh,rust + βh,rust
(4.16)
nrust =
αn,rust
αn,rust + βn,rust
(4.17)
We passen de formules van achterwaartse Euler(3.17) toe op vergelijking 4.13, waarbij de
activatiefunctie wordt gegeven door I t :
Vmt+1 = A−1 Vmt − Vmt (gN a n3 hVmt + gK m4 + gL ) + gN a EN a + gK EK + EL gL − I t )(4.18)
De matrix A kan op een analoge manier berekend worden als in hoofdstuk 3 via:
v1 = −
∆t
2πara ∆x2 Cm
(4.19)
∆t
πara ∆x2 Cm
(4.20)
v2 = 1 +
We krijgen ai,i+1 = ai,i−1 = v1 voor i gaande van 2 tot N-1 en ai,i = v2 voor i gaande van
2 tot N-1. Voor a1,1 ,a1,2 ,aN,N −1 en aN,N gebruiken we dezelfde randvoorwaarden als in
sectie 3.5: a1,1 =aN,N =v2 en a1,2 = aN,N −1 = 2v1 .
t
Het stelsel lossen we op door eerst de waarden Vm,gesch
, mtgesch ,ntgesch en htgesch te schatten
t+1
op tijdstip t. Uit de geschatte waarde voor Vmt berekenen we de waarden mt+1
nieuw ,nnieuw
t+1
en ht+1
nieuw volgens vergelijkingen 4.4 tot 4.12, waarmee we vervolgens Vm,nieuw kunnen
t
berekenen volgens vergelijking 4.18. Indien Vm,gesch
,mtgesch ,ntgesch en htgesch gelijk zijn aan
62
Hoofdstuk 4. Het actieve model
Tabel 4.1: Waarden van de gebruikte parameters voor het actieve model
Gebruikte waarden
Parameter
Eenheid
Waarde
Cm
Ra
a
gN a
gK
gL
EN a
EK
EL
Vrust
µF/cm2
Ωcm
cm
S/cm2
S/cm2
S/cm2
mV
mV
mV
mV
0.001
35.4
5 · 10−4
0.12
0.036
0.0003
50
-77
-54.387
-65
t+1
t+1
t+1
respectievelijk Vm,nieuw
,mt+1
nieuw ,nnieuw en hnieuw , kunnen we naar het volgende tijdstip
gaan. Indien dit niet het geval is, herhalen we het proces met een nieuwe schatting:
t+1
t+1
t
t
t
t
= Vm,nieuw
, mtgesch = mt+1
Vm,gesch
nieuw , ngesch = nnieuw en hgesch = hnieuw .
4.6
4.6.1
Vergelijking met de simulatie-omgeving neuron
Lokale stroominput
Net als bij het passieve model leggen we eerst een lokale stroom aan middenin de bundel.
Merk op dat de eenheden in Neuron verschillen van de standaard eenheden. In de code
leggen we een stroom aan van 5.5 µA, wat een waarde van 5500 wordt in Neuron aangezien
ze daar werken in nA. Op figuur 4.6 en 4.7 zien we respectievelijk het tijdsverloop en het
ruimteverloop van de resulterende membraanspanning bekomen met Neuron(groen) en
onze code(rood).
Hoofdstuk 4. Het actieve model
63
Figuur 4.6: I=5.5µA na 2.5 ms
Figuur 4.7: I=5.5µA na 2.5 cm
Afgezien van een factor van 0.001 komen deze oplossingen overeen. Zoals bij het passieve model blijft deze fout dus aanwezig, maar zien we dat de oplossingen wel perfect
Hoofdstuk 4. Het actieve model
64
overeenkomen na een herschaling.
De gecreëerde spanning ligt onder de drempelspanning. Om ook het gedrag te controleren
boven VT leggen we nu een stroom aan van 550 µA, wat 550000 nA wordt in Neuron. De
resultaten zijn te vinden in figuur 4.8 en 4.9.
Figuur 4.8: I = 5500 µA na 2.5 ms
Figuur 4.9: I = 5500 µA na 2.5 cm
Hoofdstuk 4. Het actieve model
4.6.2
65
Continue stroominput
We bestuderen de resultaten van onze code bij de aanleg van het elektrische veld voor
7.5 ms. We merken opnieuw op dat het elektrische veld in onze code een stroom zal
genereren van de orde van µA. De stroomvector die we doorgeven aan Neuron moet dus
met een factor 1000 vermenigvuldigd worden. In figuren 4.10 en 4.11 staan de tijds-en
ruimteverlopen van Vm .
Figuur 4.10: Stimulatie met het elektrische veld i.f.v. afstand na 2.5 ms
Figuur 4.11: Stimulatie met het elektrische veld i.f.v. tijd na 2.5 cm
Hoofdstuk 4. Het actieve model
66
Opnieuw zien we een gelijkaardige amplitude fout bij het ruimteverloop van Vm . Het
tijdsverloop is, mits een kleine offset, ongeveer gelijk.
4.7
4.7.1
Eigenschappen van het actieve model
De drempelspanning
Indien we de waarden uit tabel 4.1 gebruiken zien we dat de permeabiliteiten van kalium
en natrium elkaar in evenwicht houden tot een stimulatie ter waarde van 1.8 µA. Indien we
de stimulatie nu verhogen naar 1.9 µA merken we het ontstaan op van een actiepotentiaal.
Deze drempelwaarde is te zien op figuur 4.12.
Figuur 4.12: De drempelspanning
4.7.2
De ’all-or-nothing’ wet
We verwachten theoretisch dat de vorm van de actiepotentiaal altijd hetzelfde zal zijn,
ongeacht de initiële depolarisatie. Dit tonen we aan door een stimulatie aan te leggen van
10 µA. De vorm van de actiepotentiaal was al te zien op figuur 4.12 waar de stimulatie
stroom 1.9 µA bedroeg. Het gedrag bij een excitatie van 10 µA is te zien op figuur 4.13. In
het blauw staat het tijdsverloop op de plaats van de stroominjectie, rood is het tijdsverloop
0.1 cm verder. We zien dat Vm na 0.1 cm zijn standaard vorm heeft aangenomen door het
regeneratieproces. We zien ook dat de actiepotentiaal meer in de tijd is opgeschoven door
de extra afstand die de potentiaal moest overbruggen.
Hoofdstuk 4. Het actieve model
67
Figuur 4.13: De ’all-or-nothing’ wet
4.7.3
Accomodatie
Om de accommodatie eigenschap aan te tonen leggen we een stimulus aan in stappen.
We gaan naar een depolarisatie van 1.9 µA in twee stappen. Eerst leggen we een stroom
aan van 0.8 µA gedurende 0.05 ms en daarna verhogen we de stroom tot 1.9 µA voor
de volgende 0.05 ms. We merken op dat deze depolarisatie boven de drempelspanning
ligt, dus zonder accommodatie zou een actiepotentiaal gegenereerd moeten worden. Zoals
we zien op figuur 4.14 is dit niet het geval. Door de verdere stijging van PK , en het
continue kleiner worden van PN a door inactivatiemoleculen, blijft de drempelspanning
stijgen tijdens de stapaanleg van de excitatiepulsen.
Figuur 4.14: Afwezigheid van een actiepotentiaal door accomodatie
Hoofdstuk 4. Het actieve model
4.7.4
68
De refractaire periode
Om de laatste eigenschap, het bestaan van relatieve en absolute refractaire perioden, aan
te tonen, bekijken we het verloop over 20 ms en we beginnen met een depolarisatie van 1.9
µA voor 0.4 ms waarbij we een actiepotentiaal waarnemen. Gedurende de eerste 6 ms zien
we dat er geen tweede actiepotentiaal gecreëerd wordt, ongeacht de extra stimulatie. Dit
noemt men de absolute refractaire periode, wat te zien is op figuur 4.15 waar een tweede
depolarisatie plaatsvindt ter orde van 40 µA tussen 5.6 en 6 ms. Na 6 ms, kan er wel een
actiepotentiaal gecreëerd worden, maar enkel indien er een grotere excitatie dan 1.9 µA
plaatsvindt. Dit noemt men dus de relatieve refractaire periode. Op figuur 4.16 staat de
membraanspanning afgebeeld bij een stimulatie van 2.1 µA tussen 6 en 6.4 ms.
Figuur 4.15: De refractaire periode, op een afstand van 10 mm na de stimulatie
Hoofdstuk 4. Het actieve model
69
Figuur 4.16: De refractaire periode, op een afstand van 10 mm achter de stimulatie
4.8
4.8.1
Invloed van de parameters van het model
Inleiding
We onderzoeken hoe de straal van de bundel, de membraancapaciteit en de axiale weerstand Vm beı̈nvloeden. We merken op dat temperatuur een belangrijke invloed zal hebben
en dit vooral op de evenwichtspotentialen EK en EN a volgens vergelijking 4.2. We stimuleren het model met het elektrische veld en gebruiken de standaard parameters uit tabel
4.1. De bestudeerde parameter intervallen hebben hetzelfde interval als in hoofdstuk 3,
mits een andere eenheid.
4.8.2
De membraancapaciteit
Op figuur 4.17 zien we het verloop van Vm voor een stijgende membraancapaciteit. Hierbij
hebben we voor α en θ π/3 gekozen.
Hoofdstuk 4. Het actieve model
70
Figuur 4.17: Invloed van de membraancapaciteit
We zien dat een grotere capaciteit leidt tot een actiepotentiaal die trager tot stand komt.
Dit is ook afhankelijk van het weefsel aangezien aan de grenswaarden grotere hyperpolarisaties voorkomen. Het verticale patroon wordt ook minder glad wat duidt op een lagere
conductiesnelheid van de actiepotentiaal, zoals ook het geval was voor Vm bij het passieve
model.
4.8.3
De axiale weerstand
Figuur 4.18 geeft het verloop van de membraanspanning weer bij een axiale weerstand
tussen 1 en 350 Ωcm. De neuronenbundel ligt hier op de z-as. We zien dat voor een kleine
Ra het elektrische veld een actiepotentiaal gaat generen aan het uiteinde van het neuron,
nabij de hersenvliezen. Indien we Ra nu verhogen ontstaat er ook een actiepotentiaal nabij
de thalamus. We weten immers uit hoofdstuk 3 dat een grotere axiale weerstand aanleiding
geeft tot een kleinere verspreiding van de membraanpotentiaal over de lengte van het axon.
We kunnen op de figuur zien dat de hyperpolarisatie zone rond 0.5 cm inderdaad smaller
en smaller wordt. Hierdoor wordt de zone nabij de thalamus minder gehyperpolariseerd
waardoor er een actiepotentiaal kan ontstaan. Indien we Ra nog meer verhogen merken we
op dat ook de actiepotentialen zich trager gaan verspreiden over de lengte van het axon.
Ra heeft dus een invloed op de conductiesnelheid van deze actiepotentialen.
Figuur 4.18: Invloed van de axiale weerstand
Hoofdstuk 4. Het actieve model
4.8.4
71
De straal
We laten de straal variëren tussen 0.5 en 50 µm. Op figuur 4.19 zien we dat de straal een
invloed zal hebben op de snelheid van de actiepotentialen. Hoe groter de straal, hoe groter
de conductiesnelheid en hoe sneller een actiepotentiaal zich over de lengte verspreidt.
Figuur 4.19: Invloed van de straal
4.9
4.9.1
Uitbreidingen van het model
De aanwezigheid van myeline
Het actieve model werkt niet met een membraanweerstand, maar met conductiviteitswaarden voor de verschillende kanalen. We passen het model aan zodat het elektrisch effect
enkel een direct effect heeft ter hoogte van de nodes van Ranvier en we gebruiken een
membraan capaciteit van 0.001 µF/cm2 voor het myeline gedeelte en 0.01 µF/cm2 voor
een node. We gebruiken een afstand tussen de nodes van 1.9 mm en een lengte van 100
µm voor de node van Ranvier[31].
We passen de overige waarden van tabel 4.1 toe. Figuur 4.20 toont bovenaan Vm zonder
myeline, terwijl onderaan Vm met myeline staat. Het neuron ligt hier evenwijdig met
de y-as. We zien dat de aanwezigheid van myeline tot gevolg heeft dat Vm sneller gaat
stijgen, en dit omwille van de kleinere membraancapaciteit. We zien ook dat de nodes van
Ranvier een kleine horizontale schakering invoeren, maar na enkele ms zijn deze al niet
meer te zien. Net als bij het passieve model introduceert een myelinelaag ook een hogere
conductiesnelheid voor de membraanspanning. De actiepotentiaal verspreidt zich sneller
over de totale lengte.
4.9.2
Het effect van een bocht
We passen een bocht toe volgens het gelijkaardige principe in sectie 3.9.2. We gebruiken
hier een membraancapaciteit van 0.01 µF/cm2 voor de duidelijkheid van de figuur. Figuur
4.21 toont het resultaat.
72
Hoofdstuk 4. Het actieve model
(a) zonder myeline
(b) met myeline
Figuur 4.20: Vm voor een actief model zonder en met myeline
Hoofdstuk 4. Het actieve model
73
Figuur 4.21: Het effect van een bocht rond de thalamus in het YZ vlak
We zien dat actiepotentialen langs het axon reizen, maar geneutraliseerd worden in het
midden door een zone die sterk gehyperpolariseerd is. Indien we willen dat een actiepotentiaal gegenereerd en getransporteerd kan worden over de gebogen bundel, zijn deze
hyperpolarisatie zones zeer belangrijk. Het weefsel en de ligging van de bundel heeft dus
een grote invloed op de stimulatie van neuronenbundels.
Hoofdstuk 5
Een vergelijkende studie tussen
het passieve en het actieve model
5.1
Inleiding
In dit hoofdstuk vergelijken we de twee modellen onder een variërende stimulatie. We
bestuderen wat er gebeurt met Vm wanneer we de duur van de stimulatie veranderen en
periodieke stimulatie gebruiken. Deze aanpassingen vergen enkel een wijziging van de stim
matrix in de code. We bestuderen eerst het gedrag bij een lokale stroominjectie, waarna
we in de laatste sectie een vergelijkende studie maken met het elektrische veld als input.
5.2
De duur van de stimulatie
Wat gebeurt er met Vm indien de duur van de stimulatie wijzigt? We gebruiken hierbij
de parameters uit tabel 3.2 en tabel 4.1 voor respectievelijk het passieve en het actieve
model. Voor beide methoden bekijken we een totaal verloop van 30 ms.
5.2.1
Het gedrag onder de drempelspanning
We bekijken eerst het passieve model waar we een stimulus aanleggen van 1 nA voor een
tijdsduur van zowel 0.75 ms als 7.5 ms. De resultaten staan afgebeeld in figuur 5.1. We
zien dat het verloop van de membraanpotentiaal niet wordt beı̈nvloed door de duur van de
stimulatie. Er is een vast exponentieel stijgend en dalend verloop. De tijdsduur bepaalt
enkel hoe lang dit stijgende verloop aanhoudt en is dus enkel een bepalende factor voor
de amplitude, maar niet voor de specifieke vorm van de functie Vm .
We passen dezelfde stroom toe bij het actieve model, voor zowel 0.75 als 7.5 ms. Het
resultaat op figuur 5.2 vertoont een gelijkaardige exponentiële stijging en daling als het
passieve model tot ongeveer 4 ms. We zien aan de rode curve dat de membraanspanning al begint te dalen gedurende de stimulatie tussen 4 en 7.5 ms. Na 7.5 ms zakt de
membraanspanning vrij snel naar de rustpotentiaal via een ’undershoot’. Indien we een
derde stroom aanleggen voor 22.5 ms(groen) zien we dat een evenwicht bereikt wordt
vanaf 10 ms tijdens de stimulatie. Wanneer de stimulatie wordt uitgeschakeld gaat de
membraanpotentiaal ook hier via een ’undershoot’ naar zijn evenwichtswaarde.
74
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
75
Figuur 5.1: Verschillende stimulatietijden voor een lokale stroominjectie toegepast op het
passieve model
Figuur 5.2: Verschillende stimulatietijden voor een lokale stroominjectie toegepast op het
actieve model, met een membraanspanning onder de drempelspanning
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
76
De stimulatieduur is wel degelijk een bepalende factor bij het actieve model. Waarom
begint de membraanpotentiaal na 4 ms al te dalen terwijl de stimulatie nog bezig is?
Het antwoord hierop is gelijkaardig aan dat van de vraag waarom de actiepotentiaal zijn
specifieke vorm heeft. Het ionenkanaal van natrium opent snel, maar gaat ook snel weer
dicht door de inactivatiemoleculen. Hierdoor stijgt de membraanpotentiaal snel, maar
begint hij snel weer te dalen. Het ionenkanaal van kalium opent pas na ongeveer 5 ms
en blijft open tijdens de stimulatie. Wanneer het natriumkanaal sluit vindt er een nieuw
evenwicht plaats tussen de evenwichtspotentiaal van kalium en die van de lekkanalen. Dit
evenwicht is te zien in de groene kleur op figuur 5.2, en wordt dus bepaald door de kans
dat de kaliumkanalen openen en de conductiviteit van de lekkanalen, onder invloed van
de aangelegde stroom.
5.2.2
Het gedrag boven de drempelspanning
We hebben in hoofdstuk 4 gezien dat de drempelspanning overschreden wordt bij een
stimulatie van 1.9 µA. We gebruiken nu een stroominjectie van 10 µA voor zowel het
passieve als het actieve model. Bij het passieve model vinden we een gelijkaardig verloop
zoals te zien was op figuur 5.1, maar met een hogere amplitude en stijgtijd.
Voor het actieve model vinden we op de plaats van stimulatie een gelijkaardig resultaat
als het gedrag onder de drempelspanning, mits een hogere amplitude(figuur 5.3). Zoals bij
het passieve model zien we dat de membraanspanning ook sneller stijgt naar een hogere
waarde.
Aangezien we de drempelspanning overschrijden, verwachten we dat er een actiepotentiaal
gecreëerd zal worden. We zien dit op figuur 5.4, waar het verloop van de membraanspanning 6 mm verder van de stroominjectie weergegeven wordt. De membraanpotentiaal is
voor alle stimulatietijden over het volledige neuron hetzelfde, zoals we verwachten van de
’all-or-nothing’ wet, behalve voor de lokale zone waar de stroominjectie plaatsvindt. Er
kan slechts één actiepotentiaal gegenereerd worden, aangezien bij permanente stimulatie
accommodatie optreedt. PN a zakt snel naar nul, terwijl PK hoog blijft. We kunnen zeggen dat de stimulatieduur geen globaal effect heeft indien membraanspanningen gecreëerd
worden boven de drempelspanning; een actiepotentiaal wordt gegenereerd, waarna accommodatie optreedt. Er is enkel een extra lokale depolarisatie of hyperpolarisatie aanwezig
op de plaats van excitatie.
5.3
Periodieke stimulatie
We bekijken het effect van cyclische stimulatie, waarbij we een stroom aanleggen voor
een bepaalde tijd, gevolgd door een periode zonder stimulatie, om dan weer het proces te
herhalen.
5.3.1
Het gedrag onder de drempelspanning
We beginnen bij het passieve model en gebruiken opnieuw een stroom van 1 nA voor 0.75
ms, gevolgd door 0.75 ms rust en dit herhalen we gedurende 12 ms. We zien het gedrag
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
77
Figuur 5.3: Verschillende stimulatietijden voor een lokale stroominjectie toegepast op het
actieve model, met een membraanspanning boven de drempelspanning
Figuur 5.4: Actiepotentialen gegenereerd voor verschillende stimulatietijden, 6 mm verder
dan de locatie van stroominjectie
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
78
op figuur 5.5. Bij elke rustpauze valt de membraanpotentiaal een stuk terug volgens het
vertrouwde exponentiële gedrag. De stimuli kunnen op elkaar verder bouwen tot een
grotere amplitude bereikt wordt.
We gebruiken nu hetzelfde stimulatiepatroon voor het actieve model. Het resultaat is te
zien in figuur 5.6 in het blauw. Waar de membraanpotentiaal blijft stijgen in het passieve
model, zien we hier dat na 4 ms de potentiaal opnieuw begint te dalen, ondanks de
stimulatie die we in stappen blijven toepassen. Er is dus een duidelijk verband met figuur
5.2. In het rood staat de membraanpotentiaal afgebeeld bij permanente stimulatie voor
12 ms. Indien we de stimulatie toepassen in cycli, zal de omhullende van het tijdsverloop
van de membraanpotentiaal hetzelfde verloop kennen als bij permanente stimulatie, mits
een iets kleinere amplitude door de rustperiodes waar geen stimuli aanwezig is.
5.3.2
Het gedrag boven de drempelspanning
Bij het passieve model passen we hetzelfde systeem toe als hierboven, maar deze keer met
een stroom van 10 µA. We bekomen een gelijkaardig verloop als afgebeeld op figuur 5.5.
Bij het actieve model vinden we dat de eerste puls voldoende is om een actiepotentiaal te
genereren, maar door het bestaan van een refractaire periode zal de invloed van de overige
pulsen zeer lokaal zal zijn. Op figuur 5.7 zien we dit lokale gedrag van de pulsen. Het
dalende verloop wordt veroorzaakt door een stijgende PK bij elke excitatieperiode.
We weten uit hoofdstuk 4 dat we enkel een repetitief gedrag in het actieve model kunnen
genereren, indien er rekening wordt gehouden met een refractaire periode van ongeveer 6
ms.
5.4
Toepassingen van het elektrische veld
Nu we weten wat het effect is van lokale stromen, kunnen we verschillende toepassingen
van het elektrische veld bestuderen.
5.4.1
De duur van de stimulatie
We leggen het veld aan voor 0.75 ms en voor 7.5 ms voor zowel het passieve als het
actieve model. Bij het passieve model vinden we een tijdsverloop dat gelijkaardig is aan
figuur 5.1. Indien we naar het ruimteverloop kijken, zien we op figuur 5.8 dat er enkel
een amplitudeverschil is. Op figuur 5.9 staat de totale membraanpotentiaal afgebeeld in
functie van de stimulatieduur onder het elektrische veld.
Aangezien het elektrische veld in V/m is, moeten we dit vermenigvuldigen met een factor
10 om de eenheid mV/cm te bekomen. Bij het actieve model nemen we op figuur 5.10 waar
dat er voor elke tijdsduur een actiepotentiaal ontstaat, maar dat deze wel onderbroken
kan worden door een extra hyperpolarisatie zoals we zien op de middelste figuur. Daar
creëert het elektrische veld voor 7.5 ms een hyperpolarisatie rond de weefselovergang tussen
de thalamus en de witte materie, wat een actiepotentiaal blokkeert. Verder zien we dat
de actiepotentiaal niet naar zijn rustpunt convergeert na de piek, maar nog even blijft
hangen op de evenwichtspotentiaal tijdens de stimulatie, zoals we reeds eerder zagen op
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
79
Figuur 5.5: Een lokale stroominjectie, toegepast in verschillende cycli op het passieve
model
Figuur 5.6: Een lokale stroominjectie, toegepast in verschillende cycli op het actieve model
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
80
Figuur 5.7: Een lokale stroominjectie, toegepast in verschillende cycli op het actieve model,
met een membraanspanning boven de drempelspanning
Figuur 5.8: De membraanpotentiaal in functie van de lengte voor verschillende stimulatietijden
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
81
Figuur 5.9: Het verloop van de membraanpotentiaal in functie van stimulatietijden voor
het passieve model
figuur 5.3. We merken ook duidelijk dat dit nieuwe evenwicht sterk verbonden is met de
weefselparameters. Nabij de grensgebieden, tussen 0 en 0.5 cm en tussen 4 cm en 5 cm,
is de evenwichtspotentiaal immers groter dan de sectie in het midden. Het is ook zeer
belangrijk om op te letten voor hyperpolarisatie zones indien we een actiepotentiaal willen
genereren in een zenuwbundel.
Het verloop van de membraanspanning in functie van de stimulatietijd kan voor beide
modellen in een animatie gevonden worden via de link:
http://www59.zippyshare.com/v/85112322/file.html.
5.4.2
Periodieke stimulatie
We beginnen bij het passieve model en leggen het elektrische veld aan voor 0.75 ms, gevolgd
door 0.75 ms rust en dit herhalen we opnieuw voor 12 ms. We vinden het verwachte effect
uit sectie 5.3, maar nu over héél de lengte van de bundel. We komen opnieuw tot de
conclusie dat voor het passieve model, cyclische stimulatie een gelijkaardig effect heeft als
permanente stimulatie, maar met een kleinere amplitude, en met een op-en neergaande
stijging en daling.
Figuur 5.10: Het verloop van de membraanpotentiaal in functie van stimulatietijden voor
het actieve model
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
82
We doen hetzelfde voor het actieve model(figuur 5.11). We bekomen een gelijkaardig
verloop als bij de permanente stimulatie, waar het periodieke patroon enkel te zien is op de
nieuwe evenwichtspotentiaal tijdens de stimulatiecyclus na de piek van de actiepotentiaal.
Een korte rustpauze van 0.75 ms heeft dus geen effect op deze evenwichtswaarde. Ook
bij deze vorm van stimulatie moeten we opletten dat de actiepotentiaal niet onderbroken
wordt door een hyperpolarisatie.
Figuur 5.12 toont aan dat we rekening moeten houden met de refractaire periode indien
repetitief gedrag gewenst is. Wanneer de rustpauze immers te klein is, zal er geen actiepotentiaal gegenereerd worden. Op de figuur wordt het elektrische veld eerst aangelegd
voor 7.5 ms, gevolgd door 0.75 ms rust en dit wordt drie keer herhaald. We merken op
dat de tweede en derde stimulatieperiode inderdaad geen actiepotentiaal genereren.
Op figuur 5.13 zien we dat na 9.75 ms de refractaire periode voorbij is en nieuwe actiepotentialen gecreëerd kunnen worden. Een cyclus van 0.75 ms stimulatie en 9.75 ms rust zal
dus leiden tot een repetitief gedrag voor actiepotentialen. We tonen hier ook aan dat een
extra hyperpolarisatie bijkomende actiepotentialen blokkeert aan de thalamus.
Indien we deze toepassing vergelijken met het passieve model nemen we een groeiende
hyper-en depolarisatie waar langs beide kanten van het neuron (figuur 5.14). Ook de
kleine depolarisatie aan de kant van de thalamus, die bij het actieve model leidt tot een
actiepotentiaal, en de grotere hyperpolarisatie net ernaast, zijn terug te vinden op deze
figuur.
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
83
Figuur 5.11: De membraanpotentiaal voor het actieve model onder een periodiek aangelegd
elektrisch veld
Figuur 5.12: De refractaire periode bij de membraanpotentiaal voor het actieve model
onder cyclische stimulatie met een elektrisch veld
Hoofdstuk 5. Een vergelijkende studie tussen het passieve en het actieve model
84
Figuur 5.13: Repetitief gedrag bij een cyclus van 0.75 ms stimulatie en 9.75 ms rust voor
het actieve model
Figuur 5.14: Repetitief gedrag bij een cyclus van 0.75 ms stimulatie en 9.75 ms rust voor
het passieve model
Hoofdstuk 6
Conclusie
In deze masterproef hebben we modellen opgesteld voor een passieve en een actieve benadering van het neurofysiologische gedrag onder stimulatie van een aangelegd elektrisch
veld en de oplossingen hiervan hebben we gevalideerd met bestaande methoden.
We hebben de invloed van verschillende parameters bestudeerd en verdere uitbreidingen
onderzocht. Voor het passieve model zagen we dat de parameters vooral invloed hebben
op de stijg-en daaltijd van de membraanpotentiaal en de verspreiding hiervan over de
lengte. Bij het actieve model is dit complexer. De membraancapaciteit heeft ook hier een
invloed op de stijg-en daaltijd, maar vanaf er een actiepotentiaal ontstaat, zal de axiale
weerstand en in mindere mate de straal van het neuron de conductiesnelheid van actiepotentialen beı̈nvloeden. Zo zal een grotere axiale weerstand aanleiding geven tot smallere
hyperpolarisatie zones, waardoor een actiepotentiaal kan ontstaan op nabijgelegen locaties.
Deze eigenschappen zijn van groot belang aangezien neuronen sterk van grootte kunnen
variëren. Indien de straal wijzigt, veranderen ook de specifieke membraaneigenschappen.
Ook bij groeiende of degeneratieve neuronen kunnen deze eigenschappen sterk variëren[35].
In de praktijk zullen de te behandelen zenuwen eerst in detail bestudeerd moeten worden
om zo de grootte te schatten en de juiste parameterwaarden voor het model te berekenen.
We toonden ook aan dat een bocht een groot effect kan hebben op de membraanpotentiaal, zowel onder als boven de drempelspanning en dit bij het passieve en het actieve
model. Bij een bocht zal het belangrijk zijn om na te gaan hoe dicht de bundel bij een
weefselverandering gelegen is. Indien de bocht rond de thalamus draait, zagen we bij het
passieve model een grote afwisseling van hyper-en depolarisaties. Bij het actieve model
zagen we dat de bocht een extra hyperpolarisatie creëert in het midden, wat het transport
van een actiepotentiaal door een zenuw blokkeert. Het zal dus van groot belang zijn om
het volledige verloop van een zenuw in het hoofd te kennen, om zo het nieuwe patroon van
het elektrische veld in rekening te brengen.
De grootte en de geometrie van de zenuwbundels kunnen we bepalen via ’diffusion tensor
imaging’(DTI). Dit is een techniek waarbij de diffusie van water gebruikt wordt om zenuwen te visualiseren[36]. DTI wordt toegepast bij tractografie, waar het verloop van een
zenuw helemaal in kaart wordt gebracht zoals te zien is in het voorbeeld van figuur 6.1. Er
zijn ook nieuwe ontwikkelingen waarbij men fluorescente proteı̈nen in neuronen activeert,
85
Hoofdstuk 6. Conclusie
86
waardoor de cellen los van elkaar gevisualiseerd kunnen worden[37]. Dit resulteert in een
beeld waar elk neuron een andere kleur heeft, een ’brainbow’ genoemd en weergegeven op
figuur 6.2.
Figuur 6.1: Een voorbeeld van tractografie
Figuur 6.2: Een voorbeeld van een ’brainbow’[38]
We hebben het elektrische veld op verschillende manieren toegepast op beide modellen.
Het passieve model vertoonde een vrij voorspelbaar gedrag, namelijk hoe groter en langer
de stimulatie, hoe sneller en hoger de membraanpotentiaal zal reiken. Dit gebeurt telkens
Hoofdstuk 6. Conclusie
87
met een exponentieel stijgend en dalend gedrag. Het periodiek aanleggen van de stimulus
introduceert een gelijkaardig patroon, maar verloopt volgens een exponentiële zaagtand
functie.
Voor het actieve model moeten we rekening houden met het al dan niet ontstaan van een
actiepotentiaal. Op figuur 5.10 zagen we bijvoorbeeld dat een actiepotentiaal geblokkeerd
wordt door een hyperpolarisatie op een deel van de neuronenbundel. Indien we een geval
van tinnitus willen behandelen, waar de overgevoeligheid van een zenuw kan leiden tot een
actiepotentiaal, en dus ook tot oorsuizingen, kunnen we een hyperpolarisatie induceren
die lang genoeg duurt om de actiepotentiaal te blokkeren. We moeten hierbij de spoel
zo oriënteren dat het elektrische veld geen extra actiepotentialen creëert verderop in de
bundel.
Indien we wel een actiepotentiaal willen creëren, zoals bij de inhibitie van neuronen om de
ziekte van Parkinson te behandelen, geldt het omgekeerde. Grote, langdurige hyperpolarisaties moeten vermeden worden om een actiepotentiaal niet te neutraliseren.
Het herhaaldelijk induceren van een actiepotentiaal gebeurt met een periodiek elektrisch
veld. Indien dit veld geproduceerd wordt via TMS, spreken we van rTMS(’repetitive
TMS’). We kunnen nu een stappenplan voor rTMS uitwerken om op een effectieve manier
bepaalde zenuwen te exciteren. Eerst wordt de zenuw gedetailleerd in kaart gebracht via
tractografie . Uit de geometrie halen we vervolgens de parameters voor het axoplasma en
het membraan. Via deze parameters kunnen we dan berekenen waar de drempelspanning
zal liggen, en hoe groot het elektrische veld moet zijn om een actiepotentiaal te bekomen.
Indien men de zenuw wenst te hyperpolariseren, moet er uiteraard onder deze drempelspanning gebleven worden. Verder dienen we rekening te houden met de refractaire periode
van de bundel, zodat we zeker zijn dat ons periodiek elektrisch veld herhaaldelijk een actiepotentiaal kan genereren. Het model van dit eindwerk kan bij deze laatste stappen
gebruikt worden om te bepalen hoe groot of hoe klein het elektrische veld precies moet
zijn om tot de juiste resultaten te komen. Indien de refractaire periode gekend is, kan dit
omgezet worden naar de frequentie waar rTMS mee werkt.
Ten slotte onderzochten we de verschillen tussen het actieve en het passieve model. Het
passieve model benadert het actieve goed tot een bepaalde membraanpotentiaal bereikt
wordt. Op dit punt beginnen de permeabiliteiten van de ionenkanalen een rol te spelen.
Bij kleinere excitaties kan het passieve model nog toegepast worden, maar vanaf enkele
mV, schakelen we best over naar het actieve model.
Als laatste willen we vermelden dat er bepaalde parameters in dit eindwerk constant zijn
beschouwd, namelijk de kanaalconductiviteiten gN a , gK en gL en de evenwichtspotentialen
EN a , EK en EL . De potentialen zijn echter afhankelijk van de temperatuur en hebben een
invloed op de conductiviteiten GN a , GK en GL [39]. Bovendien kunnen de kanaalconductiviteiten ook beı̈nvloed worden door bepaalde stoffen[40]. Deze invloed hebben we niet
bestudeerd in dit werk.
Bijlage A
Handleiding voor de code
active model
Lost het actieve model op voor een rechte neuronenbundel.
input: α = ruimtehoek t.o.v. de x-as in het XY vlak, θ = ruimtehoek t.o.v. de z-as, plots
= 0 geen figuren, 1 wel figuren.
output: membraanspanning V
active model curve
Lost het actieve model op voor een gebogen neuronenbundel in het YZ-vlak.
input: beginpos = de beginpositie van de bundel, voorbochtpos = de positie juist voor
de bocht, α = de hoek die de bocht maakt in het YZ-vlak, tegen de klok in, straal = de
straal van de hoek, afstand = de afstand die de zenuw afligt na de bocht, plots = 0 geen
figuren, 1 wel figuren.
output: membraanspanning V, plaatsvectoren y en z in het YZ-vlak.
active model myeline
Lost het actieve model op met myeline.
input: α = ruimtehoek t.o.v. de x-as in het XY vlak, θ = ruimtehoek t.o.v. de z-as, plots
= 0 geen figuren, 1 wel figuren.
output: membraanspanning V
calculate E actief
Berekent het elektrische veld langs een rechte bundel voor het actieve model
input: beginpos = beginpositie, eindpos = eindpositie.
output: Het elektrische veld E
calculate E curve active
Berekent het elektrische veld langs een gebogen neuronenbundel in het YZ-vlak voor het
actieve model.
input: beginpos = de beginpositie van de bundel, voorbochtpos = de positie juist voor
88
Bijlage A. Handleiding voor de code
89
de bocht, α = de hoek die de bocht maakt in het YZ-vlak, tegen de klok in, straal = de
straal van de hoek, afstand = de afstand die de zenuw aflegt na de bocht, plots = 0 geen
figuren, 1 wel figuren.
output: membraanspanning V, plaatsvectoren y en z in het YZ-vlak.
calculate E curve passive
Berekent het elektrische veld voor een gebogen neuronenbundel in het YZ-vlak voor het
passieve model.
input: beginpos = de beginpositie van de bundel,voorbochtpos = de positie juist voor de
bocht, α = de hoek die de bocht maakt in het YZ-vlak, tegen de klok in, straal = de straal
van de hoek, afstand = de afstand die de zenuw aflegt na de bocht, plots = 0 geen figuren,
1 wel figuren.
output: membraanspanning V, plaatsvectoren y en z in het YZ-vlak.
calculate E extra.m
Berekent de stimulatie afkomstig van een neuronenbundel.
input: V = membraanpotentiaal van een nabijgelegen neuronenbundel, straal = afstand
tussen de 2 bundels, beginpos = beginpositie, eindpos = eindpositie.
output: de stimulatiematrix ’stim’.
calculate E passief
Berekent het elektrische veld langs een rechte bundel voor het passieve model.
input: beginpos = beginpositie,eindpos = eindpositie.
output: Het elektrische veld E
compare code neuron
Vergelijkt de neuron/code resultaten voor het passieve model.
input: file naam is de naam van het bestand met data van neuron.
output: /
compare HH neuron
Vergelijkt de neuron/code resultaten voor het actieve model.
input: file naam is de naam van het bestand met data van neuron.
output: /
create movie active
Maakt een avi bestand voor het actieve model. Parameters moeten in de code aangepast
worden.
input: /.
output: F = frames van de video
create movie passive
Bijlage A. Handleiding voor de code
90
Maakt een avi bestand voor het passieve model. Parameters moeten in de code aangepast
worden.
input: /.
output: F = frames van de video
create parameters active
Bepaalt alle parameters van het actieve model.
input: /.
output: Alle parameters van het model
create parameters passive
Bepaalt alle parameters van het passieve model.
input: /.
output: Alle parameters van het model
gating variables
Bepaalt de ’gating’ variabelen van het actieve model.
input: Vinput = de membraanpotentiaal op het huidige tijdstip, Vrust = de rustpotentiaal,
m previous = m op het vorige tijdstip, n previous = n op het vorige tijdstip, h previous
= h op het vorige tijdstip, deltat = tijdstap.
output: m,n en h op de huidige tijdstappen.
gating variables backward
Bepaalt de ’gating’ variabelen van het actieve model volgens de achterwaartse Euler methode.
input: Vinput = de membraanpotentiaal op het huidige tijdstip, Vrust = de rustpotentiaal,
m previous = m op het vorige tijdstip, n previous = n op het vorige tijdstip, h previous
= h op het vorige tijdstip, deltat = tijdstap.
output: m,n en h op de huidige tijdstappen.
gating variables forward
Bepaalt de ’gating’ variabelen van het actieve model volgens de voorwaartse Euler methode.
input: Vinput = de membraanpotentiaal op het huidige tijdstip, Vrust = de rustpotentiaal,
m previous = m op het vorige tijdstip, n previous = n op het vorige tijdstip, h previous
= h op het vorige tijdstip, deltat = tijdstap.
output: m,n en h op de huidige tijdstappen.
increase size
Vergroot de grootte van een vector, alle waarden worden dus op een kleiner raster gezet.
input: N = grootte van de nieuwe vector, E = Vector die omgezet moet worden.
output: De nieuwe vector Vbegin
Bijlage A. Handleiding voor de code
91
Invloed bundel
Toont de invloed aan van een bundel(V1) op een andere bundel(V2) bij het passieve model.
input: afstand = de afstand tussen de 2 bundels.
output: De 2 potentiaalmatrices, één zonder de invloed, en één met enkel de invloed van
de andere bundel.
load data
Lees data, afkomstig van spoel in.
input: plots = 0 geen figuren, 1 wel figuren. Code moet aangepast worden om te bepalen
welke figuren geplot worden.
output: De drie 3D matrices van het elektrische veld.
load data abs
Leest data, afkomstig van de spoel in, in absolute waarden.
input: plots = 0 geen figuren, 1 wel figuren. Code moet aangepast worden om te bepalen
welke figuren geplot worden.
output: De drie 3D matrices van het elektrische veld.
passive model
Lost de kabelvergelijking op in de XYZ ruimte, met als stimulatie input het elektrische
veld, via de Crank-Nicolson methode.
input: α = ruimtehoek t.o.v. de x-as in het XY vlak, θ = ruimtehoek t.o.v. de z-as,
boundary conditions = 1: randvoorwaarden met ’phantomcurrents’, 2: randvoorwaarden
zonder ’phantomcurrents’, plots = 0: geen figuren, 1: wel figuren.
output: De membraanspanning V, tneuron = de tijdsvector, stroominput = de vector met
de locale stroominjecties.
passive model backward
Lost de kabelvergelijking op in de XYZ ruimte, met als stimulatie input het elektrische
veld, via de achterwaartse Euler methode.
input: α = ruimtehoek t.o.v. de x-as in het XY-vlak, θ = ruimtehoek t.o.v. de z-as,
boundary conditions = 1: randvoorwaarden met ’phantomcurrents’, 2: randvoorwaarden
zonder ’phantomcurrents’, plots = 0 :geen figuren, 1: wel figuren.
output: De membraanspanning V, tneuron = de tijdsvector, stroominput = de vector met
de locale stroominjecties.
passive model curve
Lost het passieve model op voor een gebogen neuronenbundel in het YZ-vlak.
input: beginpos = de beginpositie van de bundel,voorbochtpos = de positie juist voor de
bocht, α = de hoek die de bocht maakt in het XY-vlak, tegen de klok in, straal = de straal
van de hoek, afstand = de afstand die de zenuw afligt na de bocht, boundary conditions
Bijlage A. Handleiding voor de code
92
= 1: randvoorwaarden met ’phantomcurrents’, 2: randvoorwaarden zonder ’phantomcurrents’, plots = 0: geen figuren, 1: wel figuren.
output: membraanspanning V, tijdsvector t, stimulatiematrix stim, plaatsvectoren yres
en zres in het YZ-vlak.
passive model myelin
Lost de kabelvergelijking op in de XYZ ruimte met myeline, met als stimulatie input het
elektrische veld, via de Crank-Nicolson methode.
input: α = ruimtehoek t.o.v. de x-as in het XY vlak, θ = ruimtehoek t.o.v. de z-as,
boundary conditions = 1: randvoorwaarden met ’phantomcurrents’, 2: randvoorwaarden
zonder ’phantomcurrents’, plots = 0: geen figuren, 1: wel figuren.
output: De membraanspanning V, tneuron = de tijdsvector, stroominput = de vector met
de locale stroominjecties.
rate constants
Bepaalt de rate constanten van het actieve model.
input: Vinput = de huidige membraanspanning, Vrust = de rustspanning.
output: de 6 rate constanten.
read file
Leest het bestand in, afkomstig van neuron, met alle potentiaalwaarden.
input: file naam = naam van de file.
output: Vector V met de membraanpotentialen, vector T met de tijds/ruimtewaarden.
solve analytical
Lost de kabelvergelijking analytisch op.
input: cond = de voorwaarden waarop de vergelijking wordt opgelost:1. isopotentiaal 2.
Steady state ,semi-oneindig lange kabel 3. Steady state, de afgesloten kabel 4. Steady
state - de ’voltage clamp’ 5. Impulsrespons. input = de input van het model, afhankelijk
van de voorwaarden.
output: De membraanspanning V.
solve num 3d pos
Lost de kabelvergelijking op in de XYZ-ruimte, met als stimulatie input het elektrische veld
, via de Crank-Nicolson methode. input: beginpos = beginpositie,eindpos = eindpositie,
boundary conditions = 1: randvoorwaarden met ’phantomcurrents’, 2: randvoorwaarden
zonder ’phantomcurrents’, plots = 0: geen figuren, 1: wel figuren, stim = een extern
opgelegde stimumatiematrix.
output: De membraanspanning V, t = de tijdsvector, stroominput = de vector met de
locale stroominjecties.
solve num test
Bijlage A. Handleiding voor de code
93
Deze functie vergelijkt de numerieke met de analytische methode(passief).
input: cond = de conditie die getest wordt:1. isopotentiaal 2. Steady state ,semi-oneindig
lange kabel 5. Impulsrespons.
output: De membraanspannig volgens de analytische methode ’Van’ en de numerieke
methode ’Vnum’.
test forward
Test de stabiliteit van de voorwaartse euler methode voor een bepaalde set van parameters.
input = set van parameters die getest wordt.
output = test coëfficienten.
Bijlage B
Code van Neuron
B.1
Code voor het passieve model
load file(”nrngui.hoc”)
create dend
access dend
dend
nseg = 400
diam = 10.0
L = 50000
Ra = 354
insert pas
g pas = 0.0000435
e pas = 0
load file(”Readfromfile.hoc”)
objectvar stim[400]
for i=0,399
stim[i] = new IClamp(i*0.0025)
stim[i].del = 0
stim[i].dur = 7.5
stim[i].amp = vec[i]
tstop = 30
94
Bijlage B. Code van Neuron
B.2
Code voor het actieve model
load file(”nrngui.hoc”)
create dend
access dend
dend
nseg = 400
diam = 10
L = 50000
Ra = 35.4
insert hh
el hh=10.631-65
ena=115-65
ek=-12-65
cm=1
load file(”Readfromfile.hoc”)
objectvar stim[400]
for i=0,499
stim[i] = new IClamp(i*0.0025)
stim[i].del = 0
stim[i].dur = 1
stim[i].amp = 1000*vec[i]
tstop = 5
B.3
Code om data van matlab in te lezen
file: Readfromfile.hoc
objref f
f = new File()
f.ropen(”dataI.txt”)
double vec[400]
for i=0,399
vec[i] = f.scanvar()
95
Bibliografie
[1] C. Sotelo. Camillo golgi and santiago ramon y cajal: The anatomical organization
of the cortex of the cerebellum. can the neuron doctrine still support our actual
knowledge on the cerebellar structural arrangement? Brain Res. Rev., 66:16–34,
2010.
[2] A.L. Hodgkin and A.F. Huxley. A quantitative description of membrane current and
its application to conduction and excitation in nerve. J. Physiol. Biochem., 117:500–
544, 1952.
[3] L.F.Haas. Hans berger (18731941), richard caton (18421926), and electroencephalography. J. Neurol. Neurosurg. Psychiatry, 75:9, 2003.
[4] S. Gauggel, M. Rieger, and T.A. Feghoff. Inhibition of ongoing responses in patients
with parkinson’s disease. J. Neurol. Neurosurg. Psychiatry, 75:539–544, 2004.
[5] NHS.
Deep brain stimulation for parkinsons disease,
http://www.nice.org.uk/nicemedia/live/11069/30859/30859.pdf.
November 2003.
[6] M. Moazami-Goudarzi, L. Michels, N. Weisz, and D. Jeanmonod. Temporo-insular
enhancement of eeg low and high frequencies in patients with chronic tinnitus. qeeg
study of chronic tinnitus patients. BMC Neurosci., 11:11–40, 2010.
[7] Medline Plus. Brain structures. http://www.nlm.nih.gov.
[8] Elaine N. Marieb and Katja Hoehn. Anatomy & Physiology. Pearson Education,
2008.
[9] Neurocognitive application protocols. http://www.fmengert.net/id5.html.
[10] American society of
http://www.asco.org/.
clinical
oncology.
Medical
illustrations
gallery.
[11] John H. Martin. Neuroanatomy Text and atlas. McGraw-Hill, 2003.
[12] Hydrocephalus Association.
http://www.hydroassoc.org.
Brain physiology relevant to hydrocephalus.
[13] R.H.S. Carpenter. Neurophysiology. Arnold, 2003.
[14] D. De Zutter. Toegepast Elektromagnetisme. Faculteit Ingenieurswetenschappen,
2008-2009.
96
Bibliografie
97
[15] S. S. Nagarajan and D.M. Durand. A genereralized cable equation for magnetic
stimulation of axons. IEEE Trans. Biomed. Eng., 43:304–312, 1996.
[16] B. J. Roth and P.J. Basser. A model of the stimulation of a nerve fiber by electromagnetic induction. IEEE Trans. Biomed. Eng., 37:588–597, 1990.
[17] P.J. Basser. Cable equation for a myelinated axon derived from its microstructure.
Med. Biol. Eng. Comput., 31:87–92, 1993.
[18] C. Koch and T. Poggio. A simple algorithm for solving the cable equation in dendritic
trees of arbitrary geometry. J. Neurosci. Methods, 12:303–315, 1985.
[19] J. Ruohonen, M. Panizza, J. Nilsson, P. Ravazzani, F. Grandori, and G. Tognola.
Transverse-field activation mechanism in magnetic stimulation of peripheral nerves.
Electroencephalogr. Clin. Neurophysiol., 101:167–174, 1996.
[20] P.C. Miranda, L. Correia, R. Salvador, and P.J. Basser. Tissue heterogeneity as a
mechanism for localized neural stimulation by applied electric fields. Phys. Med. Biol.,
52:5603–5617, 2007.
[21] N. De Geeter, G. Crevecoeur, and L. Dupré. An efficient 3-d eddy-current solver
using an independent impedance method for transcranial magnetic stimulation. IEEE
Trans. Biomed. Eng., 58, No. 2:310–320, 2011.
[22] L.J. Gentet, G.J. Stuart, and J.D. Clements. Direct measurement of specific membrane capacitance in neurons. Biophys. J., 79:314–320, 2000.
[23] J. J. C. Rosenthal and F. Bezanilla. Seasonal variation in conduction velocity of
action potentials in squid giant axons. Biol. Bull., 199:135–143, 2000.
[24] D.F. Donnelly. A novel method for rapid measurement of membrane resistance, capacitance, and access resistance. Biophys. J., 66:873–877, 1994.
[25] H. Duifhuis en J. E. C. Wiersinga-Post. Fysische Methoden, 2003.
[26] Stuart Dalziel. Numerical Methods. Department of Applied Mathematics and Theoretical Physics University of Cambridge, 1998.
[27] E. Niebur and D. Niebur. Numerical implementation of sealed-end boundary conditions in cable theory. IEEE Trans. Biomed. Eng., 38:1266–1271, 1991.
[28] M.L. Hines and N.T. Carnevale. The NEURON Simulation Environment. Yale University, 1997.
[29] K. R. Foster, J. M. Bidinger, and D. O. Carpenter. The electric resistivity of cytoplasm. Biophys. J., 16:991–1001, 1976.
[30] Jaakko Malmivuo and Robert Plonsey. Bioelectromagnetism: Principles and Applications of Bioelectric and Biomagnetic Fields. Oxford University Press, 1993.
[31] Peggy Mason. Medical neurobiology. Oxford University Press, 2011.
98
Bibliografie
[32] EKGenius. Electrochemical potentials. http://ekgenius.net/Physio/Cell/electrochempotential.html.
[33] The McGill Physiology Virtual Lab.
Compound
http://www.medicine.mcgill.ca/physio/vlab/cap/refract.htm.
action
potential.
[34] GEneral NEural SImulation System. Introduction to computational neuroscience.
http://genesis-sim.org/GENESIS/cnslecs/cns1.html.
[35] J. Golowasch, G. Thomas, A. L. Taylor, A. Patel, A. Pineda, C. Khalil, and F. Nadim.
Membrane capacitance measurements revisited: Dependence of capacitance value on
measurement method in nonisopotential neurons. J. Neurophysiology, 102:21612175,
2009.
[36] P.J. Basser, S. Pajevic, C. Pierpaoli, J. Duda, and A. Aldroubi. In vivo fiber tractography using dt-mri data. Magn. Reson. Med., 44:625–632, 2000.
[37] S. Bradt. Researchers create colorful brainbow images of the nervous system, Oktober
2007.
[38] Jean Livet. Harvard center for brain research, 2007.
[39] E. Amatniek, W. Freygang, H. Grundfest, G. Kiebel, and A. Shanes. The effect of
temperature, potassium, and sodium on the conductance change accompanying the
action potential in the squid giant axon. J. Gen Physiol., 41:333–342, 1957.
[40] C. A. Ghiani, X. Yuan, A. M. Eisen, P. L. Knutson, R. A. DePinho, C. J. McBain,
and V. Gallo. Voltage-activated k1 channels and membrane depolarization regulate
accumulation of the cyclin-dependent kinase inhibitors p27kip1 and p21cip1 in glial
progenitor cells. J. Neurosci., 19:5380–5392, 1999.